全变速电控柴油发电机调速参数的优化应用
2020-01-16 01:19孙向勇
江苏船舶 2019年5期
殷 俊,孙向勇
(江苏镇扬汽渡有限公司,江苏 镇江 212000)
0 引言
变速发电技术是一个新兴技术,当前已经逐步推广到各行各业,特别是在新能源发电、风力发电、航空航天等领域。但在传统船舶交流配电系统中,恒频恒速柴油发电机技术依然延续使用。近年来,变速发电技术被引入到柴油发电机组中,因其良好的经济性、减振降噪性和低维护费用而得到迅速发展[1]。
由于2016年《钢质内河船舶建造规范》和《内河船舶法定检验技术规则》对船舶机舱出入口布置及破损稳定计算作了新的调整,在向相关科研设计部门咨询后,我单位提出了将汽车渡船动力推进方式由直推改为电推的方案,可将为全船动力设备供电的柴油发电机组集中布置在中舱,这样既可以满足新规的要求,又可以提升电推渡船的经济性。
电推渡船运行时的经济性与发电机组的转速运行区间密切相关,而机组能否实时响应船舶电能管理系统(PMS)的调整需求是关键。调速器作为调节柴油机转速的特定装置,在船舶电站中得到了广泛的应用。调速器的作用是通过执行机构改变油量调节机构的位置,从而改变循环供油量,将柴油机的转速调节到设定转速范围内[2]。
目前,国内外研究人员对变速柴油发电机组进行了很多研究,比如变频器性能优化、变频器控制策略、柴油发电机最佳运行转速等,但是对变速柴油发电机组的调速控制的研究相对较少,因此有必要对变速柴油发电机组的调速控制进行研究。
本文首先比较了几种电控调速方法,确定了全变速的调速方式,并基于该方式建立了硬件调速系统和控制逻辑;其次采用了优化的调速算法,使用INCA7.0标定软件,参考博世工程经验,针对算法参数进行整定,完成了变速柴油发电机组的最佳运行转速曲线的控制;最后进行了优化前后全变速电站油耗试验验证。
1 电控发电机转速调节的主要方式
1.1 固定转速调速
通过一个开关量输入,电控制单元(ECU)收到一个触发信号,使机组转速到达设定的转速,这个转速是固定不可调节的。此方案不符合该全变速机组设计的目标,只能作为机组故障时候的应急方案。
1.2 电子油门调速
电子油门通过用线束(导线)来代替拉索或者拉杆。柴油机的电子控制单元(ECU)通过采集加速踏板中比例位置传感器的两个电压信号,获得相应的油门位置。但是由于西门子PMS系统不兼容该电压信号的原因,所以未采用。
1.3 多转速调节
当设定了一定的目标转速之后,控制系统会自动将发动机稳定在设定的转速附近,电控柴油机的多转速控制是通过电子控制单元(ECU)控制转速来实现的。PMS通过多转速开关激活发动机转速调节功能,然后通过转速增加和转速减少信号,实现对发动机转动速度的无级速度调整功能。
本船升级采用电控高压共轨技术路线后,在不增加额外设备的条件下,通过柴油机自带的电子控制单元(ECU)的多转速调速接口,实现全变速调速功能,而且通过ECU数据标定实现更加精准和多样的调速特性,系统设计简单可靠。
2 电控变速发电机多转速调速组成及逻辑
2.1 多转速调速组成
电控变速发电机多转速调速控制硬件接线见图1。ECU通过针脚K18、K37、K32、K12分别获取PMS发出的“加速”、“减速”、“变速”、“定速”控制指令。ECU根据开关状态,选择是否进入全变速模式。如进入全变速发电模式,ECU按PMS给定的目标转速进行动态调节。西门子PMS系统架构图见图2。只有在PMS系统故障或按下定速越控按钮的情况下,发电机组才会进入全功率定速发电模式。

图1 多转速调速硬件接线图

图2 PMS系统架构图
2.2 多转速调速逻辑
某型号ECU多转速调速功能逻辑概图见图3。

图3 多转速调速逻辑图
当PMS给多转速开关发出使能信号后,多转速状态计算模块和转速设定模块进行比较, 确定加速/减速状态,控制器根据当前模式,选择对应的控制参数,协调发动机转速区间控制器,输出扭矩请求,经过扭矩-油量转换后,输出喷油量,实现控制发动机转速[3]。其中,多转速调速控制模块是全变速机组调速性能的关键。
3 多转速调速算法
3.1 PI控制算法
自动控制系统的核心是控制器。控制器的控制算法影响系统各个性能指标的准确性,如:稳态误差、响应速度、超调量等。
虽然目前市面上有多种控制算法,如:自校正控制、预测控制等,但是PID控制技术以其发展时间久远,技术成熟,控制效果好,方法易操作等特点,使PID控制器处于行业核心地位,在自动化控制领域里得到广泛应用。博世EDC17平台关于多转速调速功能使用了PI算法。
在控制系统中,PI 算法表达式为:

式中:u(t)为控制器输出的控制量;e(t)为偏差值;KP为比例系数;Ti为积分时间常数。
PI系统原理框图见图4。图中Y(s)、U(s)、E(s)、R(s)分别为控制器输出量、输入量、偏差值和设定值的拉普拉斯变换;S为复参数。

图4 PI系统原理框图
PI 控制器各校正环节的作用如下:
(1)比例系数KP。一般增大KP将加快系统的响应速率,在有静差系统中有利于减小静差,但加大比例系数能减小静差,却不能根除静差。而且当KP过大,会使系统产生超调,并产生振荡或使振荡次数增多,调节时间加长,并使系统变得不稳定。比例系数太小,又会使系统的动作迟缓。
(2)积分时间常数Ti,主要用于消除静差,提高系统的无差度。积分作用的强弱取决于Ti:Ti越大,积分作用越弱, 反之越强。通常在KP不变的情况下,Ti越大,积分作用越弱,闭环系统的超调量越小,系统的响应速度变慢。Ti减小将使系统调节速度加快,超调变小,但会使系统稳定性变差。
由上得出:在整个控制过程中,比例系数和积分时间常数的配置是个难点,很难达到兼顾平衡。如果引入分段控制的方法,即将比例系数与积分时间常数根据偏差值的大小,动态调整对应的值,而不是整个控制过程始终一个恒定值。当偏差信号较大时,配置较大的比例与积分作用,使输出值迅速增强;而当偏差较小时,配置较小的比例与积分作用,让PI输出减速;当偏差很小时,再在之前基础上缩小比例与积分作用,让PI的输出加速度再度放慢。这样,控制过程在偏差较大时加快了调节速度,偏差较小时又避免了超调情况出现,使得整个系统的控制性能大大提高[4]。
3.2 分段PI控制算法
针对运行工况复杂的柴油机,不可能根据其受控对象的物理特征建立起数学模型,只能依据系统辨识理论。按照上述控制思路,ECU系统对于不同转速区间的PI 参数的使用范围进行了定义。根据发动机实际转速、发动机设定的转速与设定窗口宽度的关系共划分了3个区域:正向大转速区、反向大转速区、窗口转速区,见图5。图中,曲线为发动机实际转速,2条虚线分别表示2条设定的转速值,4条黑色线表示正向、负向的窗口转速;假设正向、反向的窗口转速分别为30 r/min 和-30 r/min。

图5 转速标定区间术语定义
根据上述转速区间的定义,系统会根据不同的转速区间段选取表1中的比例和积分参数。
综上分析可知,不同PI参数的组合会产生不同的控制效果,要取得合适的控制效果,必须对表1中相关参数进行整定。
4 PI控制参数的整定
PID参数整定方法有两种[5]:
(1)理论计算整定方法。它是依靠系统的数学模型,经过理论分析和计算来控制器参数。它对系统的数学模型依赖性很强,实施起来比较困难。
(2)工程整定方法。它主要依托工程经验,不需要提前了解系统的数学模型,只需要在过程中对控制系统进行整定就可以实现。因为此方法的实现比理论计算整定法更加简单,所以在实际工程设计中常被使用。工程整定法主要有临界比例度法、Ziegler-Nichols 法和衰减曲线法3种。

表1 PI参数表
本控制器使用INCA7.0标定软件建立试验环境,采用临界比例度工程整定方法,依赖博世工程经验,在实船变速机组中进行现场整定,优化控制器参数性能,达到设计调速曲线目的。
临界比例度法标定PI参数的流程如下:
(1)把所有I参数标定为0,此时控制器只有比例系数KP起作用,以避免相互影响。把比例系数KP调整到一合适数值,等机组平衡运行一段时间,使系统切换到自动运行状态。
(2)以合适的步长,从小到大逐渐调整调节比例系数KP。每次KP调整后的维持时间约为2~4 s ,至机组转速和扭矩发生明显的抖动时再逐渐减小KP值至机组转速和扭矩恢复平稳停止,见图6。原则为在该点之后再减小KP值时机组扭矩和转速的抖动不再明显改变。找到临界点位置后,此时的比例系数记作临界比例度δ,相邻两个波峰间的时间间隔记作临界振荡周期T。通过分析计算机测量记录文件得到,δ=8.18,T=10.46 s。
(3)根据临界比例度和临界振荡周期的值,由经验公式计算出转速分段对应的PI各参数的值,见表2。
(4)按“先比例后积分”的顺序,把表1中的控制器参数按表2的经验公式进行计算。如果配置后还是不够满意,可再进一步微调表1中的整体PI修正系数。
最终将正向、反向的窗口转速标定为25 r/min 和-25 r/min。

图6 发动机处于临界震荡点
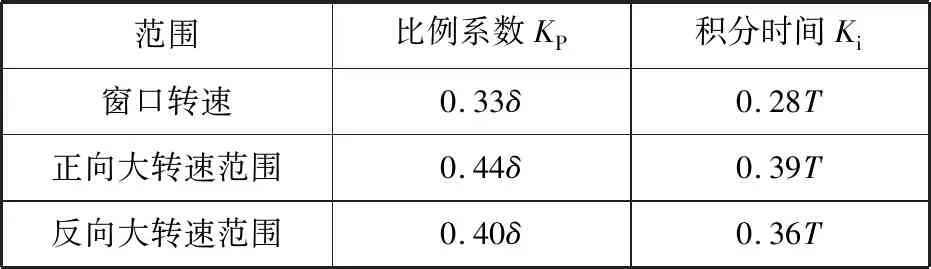
表2 临界比例度法整定PI参数博世经验参数表
5 试验结果验证
根据YC6K560L—C20型柴油机万有特性最佳运行油耗线,本船随机记录的定速发电模式、PI整定前变速发电模式、PI整定后变速发电模式各航次油耗的对比曲线图见图7。为控制器标定前发电机组的运行区间见图8。从图中看出,明显散乱无规律,发电机没有按照设定的经济油耗曲线运行,节油效果不明显,且波动较大。控制器参数工程整定后的运行曲线见图9。从图中看出,基本是在最佳运行转速曲线上运行,节油效果明显, 且波动较小。从试验结果看,经过整定的全变速发电模式较定速发电模式平均节油约22%,比未经整定的变速发电模式平均节油约13%,达到了令人满意的效果。
6 结语
对于电力推进船舶,其全变速电站的调速控制十分重要,它影响着船舶最终节能效果。本文从多转速调速逻辑入手,采用优化的分段PI算法,并以实船为例,使用INCA标定软件并参考博世工程经验进行整定,充分利用ECU数据标定实现更加精准的调速特性,提高了控制器参数匹配的效率,在不增加额外成本的情况下,使电控柴油机发电机组运行在设计的最佳油耗转速曲线,明显提升了全变速发电机组的经济效用。本文研究的内容对于全变速发电机组的调速控制有一定的参考应用价值。

图7 油耗对比
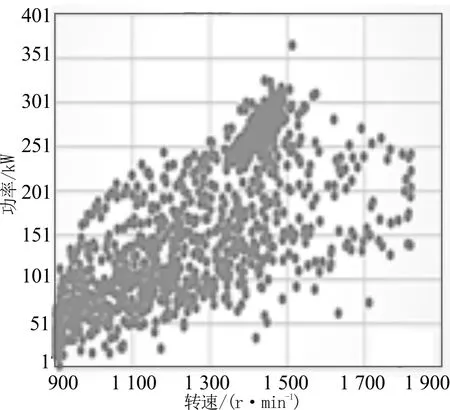
图8 PI整定前运行曲线
猜你喜欢
今日自动化(2022年1期)2022-03-07
工业设计(2022年1期)2022-02-09
汽车电器(2021年8期)2021-08-24
中国核电(2021年3期)2021-08-13
汽车电器(2021年7期)2021-08-04
汽车维修与保养(2020年11期)2020-06-09
中国新技术新产品(2019年5期)2019-05-21
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
中小企业管理与科技·中旬刊(2017年5期)2017-06-06