
基于PID 的沉管隧道施工监控系统的设计与实现
2020-03-05 02:52吴军李勤李刚蓝箭
船舶 2020年1期
吴 军 李 勤 李 刚 蓝 箭
(1.上海中船船舶设计技术国家工程研究中心有限公司 上海200011;2.上海大学 机电工程与自动化学院 上海200444)
引 言
水下隧道作为跨越江、河、湖、海的重要方式之一,被越来越多的交通运输企业定为首选方式。水下隧道的施工方式分为:围堰明挖式、钻爆法以及沉管法[1]。利用沉管法开发的水下隧道称为水下沉管隧道。它是由若干在预制场内进行预制钢筋混凝土结构或钢壳与钢筋混凝土复合结构或钢结构与混凝土复合结构的管节,分别浮运到现场,逐节沉放到水下,在水下将其相互连接并正确定位在已经开挖的水下沟槽内,然后辅以相关工程施工,使这些管节组合成为连接水体两端陆上交通的载体[2]。
为配合深圳至中山海底隧道的建设,广州打捞局整平清淤船项目已由上级部门批准建设,此船由中国船舶及海洋工程设计研究院(MARIC)提供总体设计,其设计目的是对水下沉管进行碎石基础铺设及清淤。由于水下环境复杂,施工过程控制难度较大。因此开发出一套针对施工过程的监控系统成为必须。此船关键装备“整平清淤装置”的监控系统由笔者及团队负责设计开发,并提供相应的软件和部分硬件。
1 监控系统设计方案
为实现沉管浮运沉放过程的监控,设计了监控系统,分模块实现功能。监控系统按功能分为监测与控制两个子系统,系统整体框架如图1 所示。
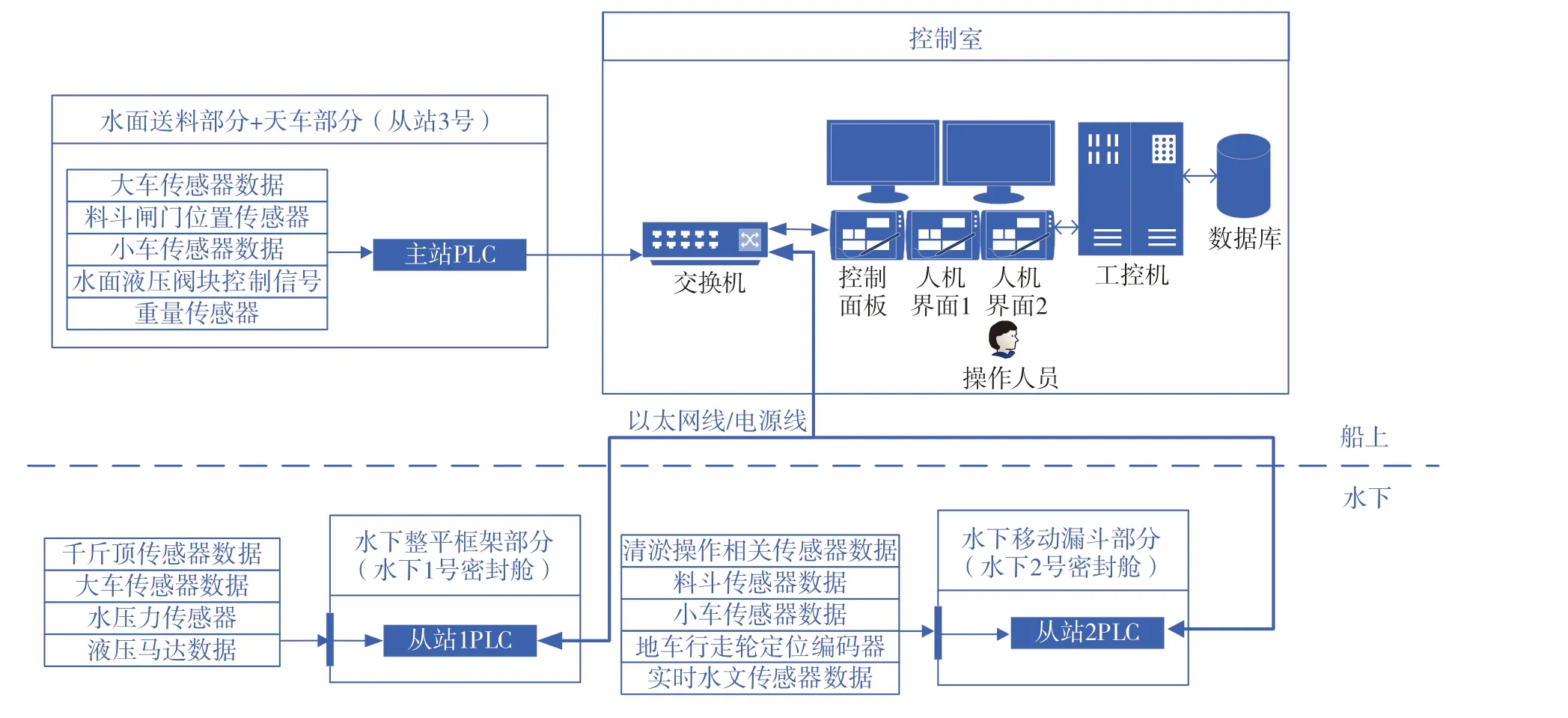
图1 监控系统框图
控制系统由吊放/回收控制模块、整平作业模块、供料控制模块以及清淤控制模块构成,模块与模块之间均有信息交互,主要实现沉管浮运沉放过程的施工操作。
监测系统由上位机软件和若干传感器构成,主要功能包括:
(1)监测传感器信息与故障报警功能;
(2)作为控制中枢,下发指令控制执行机构按设定目标动作。
控制台由整平清淤控制台、碎石输送皮带机及料仓闸门控制台这三个部分组成,集控室控制台则由主控制器PLC、水下整平机手动控制面板、行车手动控制面板、碎石输送系统手动控制面板、清淤装置手动控制面板、交换机、电源、工控机、人机界面和服务器等部分组成。沉管运动控制通过PLC控制执行设备的运动来实现,状态监测通过PC(上位机)和HMI(人机界面)的图形化显示来实现。
2 PLC 控制设计
2.1 PLC控制流程
系统集中控制室控制台由KV7500 的远程I/O模块、整平清淤控制面板、传送带闸门控制面板、液压泵站控制面板、水下整平架千斤顶控制面板、泥管溜管控制面板、姿态面板、升降面板、行车面板,以及交换机、电源、工控机、触摸屏、服务器等组成。
控制系统由PLC 实现水下小车的控制和传感器数据采集功能,系统的PLC 控制流程如图2 所示。

图2 PLC控制流程图
系统启动后,主站PLC 读取系统控制指令,若无任务,则保持待机,等待上位机下发任务指令。主站PLC 读取到系统控制指令后,需要预先判断各个PLC 主机是否处于正常状态,若否,则返回给上位机,由上位机处理该PLC主机的故障点;若所有PLC 主机均处于正常无故障状态,则由主站PLC 确定各从站PLC 的工作状态。从站PLC 完成控制后,将状态信息返回给主站PLC,主机便完成了一轮控制操作。
2.2 PID算法
本系统中,由PLC 输出水下小车液压马达的驱动信号,控制小车运动,进而实现管节的浮运沉放操作。PLC 控制部分采用经典PID 算法,实现水下小车的闭环控制。
PID 控制器由比例、积分、微分三部分组成。比例控制环节通过调整比例系数来控制系统修正误差的速度;积分控制环节用过调节积分常数来控制系统修正比例环节产生暂态误差的时间;微分控制环节通过调整微分时间来控制系统超调量,增加系统的稳定性[3-5]。PID 算法原理如式(1)所示。

式中:KP为比例系数;TI为积分常数;TD为微分时间;e(t)为误差。
下文将分两部分阐述PID 控制器的实现。
2.2.1 控制模型搭建
PLC 输出控制信号实现对小车驱动比例阀的控制,模型搭建部分主要测试小车控制系统主要测试正弦波信号下的性能。PID 模型如图3 所示。

图3 PID模型搭建
图3 中,Transfer Fcn 为水下整平小车控制系统的传递函数,i(t)= 0.5·sin(2·pi·k·ts)(A) 为控制小车驱动比例阀的电流信号,e(t) =i(t) -u(t)为系统误差,u(t)为实际输出的电流信号。通过PID 控制器的调节,系统处于稳态时,误差函数e(t)将越来越趋近于无穷小量,表示系统输量入与输出量之间的差距越来越小,系统性能达到最优。
经过反复测试,得出比例参数KP= 10,积分常数TI= 0.1,微分时间TD= 15 时,系统处于最佳状态。
下页图4 和图5 分别展示了在PID 参数最优条件下,系统误差和输入输出对比的曲线。在设定参数情况下,系统误差控制在(-0.03,0.06)(A),系统趋于稳态。

图4 误差曲线

图5 输入输出曲线
2.2.2 梯形图实现
根据上述PID 参数,设计PLC 梯形图,实现对水下整平小车闭环控制。PLC 采用基恩士KV7500 型号,其中含有PID 模块。图6 为PID 实现部分核心梯形图。

图6 PID模块梯形图
图6 所示的梯形图中,DMO 数据寄存器中存放PID 控制器工作参数。PAUSE 和RES 端均为OFF 时,PID 控制器执行工作。实现了对小车驱动液压马达的速度控制。
3 系统实时监控设计
3.1 实时通信设计
为实现监控系统的实时监控功能,系统各模块之间需要实现实时通信,包括PLC 之间、PLC 与上位机之间,以及PLC 与传感器之间的通信。在保证系统稳定性的前提下,减少信号线与电源线作为主要目标,即将水下传感器信息全部集中处理后再通过网络交换机传输至控制室网络交换机上。
3.1.1 PLC 主站与从站通信
控制系统采用PLC 级联方式实现,因此,各级PLC 之间需要实现实时数据互通。
下页图7 所示通信示意图,采用7500 集成的最简PLC 通信模式,完成各PLC 之间实时通信。
3.1.2 上位机与PLC 通信
为实现PLC 的控制操作,上位机与PLC 之间采用以太网通信。如下页图 8 和图 9 所示,分别是TCP 服务器端和客户端。
使用Qt Network 模块来编写基于TCP/IP 的网络程序。上位机采用套接字通信方式,与下位机KV7500 进行上位链路和KV 套接字两种方式通信。

图7 PLC与PLC通信图

图8 TCP服务器端

图9 TCP客户端
3.2 上位机监控软件设计
为用户设计了友好的人机交互界面,以实现岸上实时监控;为实现PLC 与上位机通信,设计了通信设置模块。监控系统系统在第一次使用时需要进行配置,故设置整平机距离参数、通信设备IP以及端口号模块;为便于对沉管浮运沉放过程进行监视,设置了操控模块、数据显示模块以及视频监控模块;为能查看作业过程数据情况,需要把数据存储起来。
上位机主要包括如下功能:参数设置、作业过程、数据显示、数据存储和曲线图打印等。上位机监控系统专为整平机控制系统运行和监测设计,该上位机监控软件使用QT 开发,主要包含以下五个功能:
(1)身份验证及安全闭锁;
(2)整平控制系统运行监控与仿真;
(3)数据采集与数据库管理;
(4)故障报警;
(5)机构动作超时保护。
图10 为上位机软件初始化流程图。
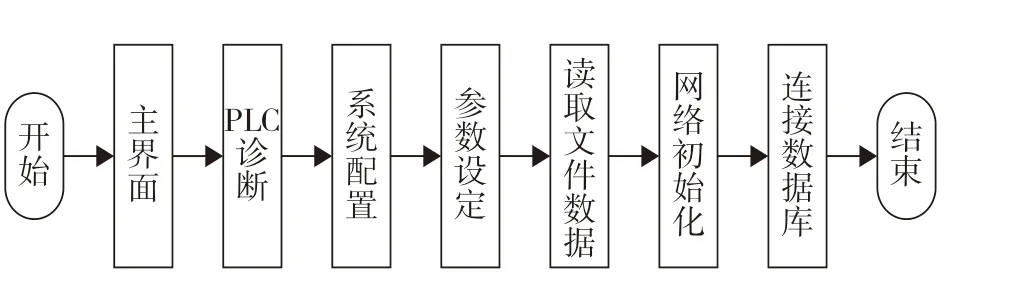
图10 软件初始化流程图
初始化部分主要完成窗口界面的构建,以及数据文件的读取,通讯、PLC 诊断、清淤系统参数设定和其他参数的初始化,数据库的连接等。上位机监控界面如图11 所示。

图11 上位机监控界面
上位机监控界面数据的显示包括:GPS 定位数据、传感器采集的信号、液压系统中的油压、温度、水分等信息,曲线图的绘制,模拟量输出状态的显示,以及操作控制面板部件动作标识。
3.3 数据库设计
数据库为系统数据交互的核心,承担数据交互的中转站。系统数据流图如图12 所示。

图12 系统数据流图
图12 中将数据传输流程划分为两部分,分别是工程中心数据和测量中心数据。两部分的基本操作一致,仅数据内容不同。两个过程互不干涉,分别按照自身存取频率对数据库进行修改。数据传输流程如下:
(1)工程中心监控系统采集数据;
(2)工程中心将采集到的数据写入数据库的数据交换表中;
(3)测量中心通过读取数据库中的数据交换表,得到所需数据。
系统数据库采用Navicat for MySQL 作为数据库图形化管理工具。在数据库系统的概念设计中,采用 E-R 模型进行描述,用实体、属性、关系来表示数据、数据内容以及数据之间的关系。数据库关系图如下页图13 所示。
图13 中各表中带有金色钥匙的字段为该表主键,实线代表所连接的两表之间拥有外键联系。系统数据库中共有14 个数据表。
系统主要由工程管理模块、设备管理模块、功能实现模块和人员管理模块组成。其中,工程管理模块即工程项目信息;设备管理模块分为整平机信息和传感器信息;功能实现模块分为定位、实时监控、故障报警、扫描高度、历史查询和打印报表;人员管理模块分为人员信息和操作日志。

图13 数据库关系图
图14 所示为监控界面的液压缸参数设计表,该表中包含4 个液压缸工作参数的设定。完成参数设定后,将设定值传入数据库,完成入库操作。

图14 液压缸参数设计表
4 结 语
本文以广州打捞局某整平清淤船项目为背景,开发设计了一套针对施工过程的实时监控系统,经调试证明该系统主要能实现以下功能:
(1)采用PLC 结合PID 算法,搭建控制模型,使调整PID 参数到最优,实现水下整平小车的移动控制,解决了沉管隧道碎石基础铺设高精度、高效率的技术要求。
(2)采用QT 技术,通过实现上位机与PLC、数据库之间的信息交互,实现沉管浮运沉放全过程的实时可视化监控。可实现系统各模块实时数据的存储、查阅和报警监控。
猜你喜欢
电镀与涂饰(2022年17期)2022-10-10
珠江水运(2022年7期)2022-05-12
建材发展导向(2022年6期)2022-04-18
建材发展导向(2021年19期)2021-12-06
珠江水运(2019年12期)2019-07-16
电脑爱好者(2018年18期)2018-11-05
珠江水运(2018年11期)2018-07-12
进出口经理人(2017年3期)2017-06-09
电脑爱好者(2017年9期)2017-06-01
现代农业科技(2016年23期)2017-04-06
