
基于北斗和无人机的道路清扫车调度系统
2020-03-10 08:57李慧珍张渤琳肖旖旎
科学与财富 2020年32期
李慧珍 张渤琳 肖旖旎
摘 要:城市道路的清洁程度与市民的生活质量密切相关,传统清扫车按固定路线进行清扫,未顾及不同路面垃圾与扬尘浓度的差异,清扫的工作效率较为低下。本文提出了基于北斗和无人机的道路清扫车调度系统,可依据实际路面情况调度清扫车。首先,基于北斗卫星定位无人机上搭载的航拍相机和PM浓度传感器,对道路垃圾进行航拍及扬尘监测;其次,基于纹理特征融合与支持向量机方法完成道路垃圾图像进行识别;最后,基于蚁群算法进行清扫车的线路调度。该系统提高了城市道路清扫的效率,对城市环境保护提供高效的技术支持。
关键词:北斗卫星导航系统;无人机;清扫车调度;蚁群算法
1.引言
近年来我国经济的飞速发展,人们生活水平的提高使得城市道路也快速发展,道路清扫车的出现虽然完成了人工化向机械化的飞跃,但是受垃圾种类繁多、道路状况复杂等多种因素的影响,清扫车的覆盖度不够高[1]。为此,本文设计了一个基于北斗和无人机的道路清扫车调度系统,通过无人机监测地面道路情况,实现清扫车的智能调度。
北斗卫星导航系统是中国独立自主建设的卫星导航系统,具有精准导航、快速定位、报告位置等功能,可以提供高精度的定位和导航服务。无人机可以搭载其他零件扩展功能,完成人类平时不易完成的空中作业,并且使用成本低、工作灵活,在小区域低空作业时具有很大优势[4]。
2. 系统框架
本系统主要分为北斗定位通信系统,无人机探测系统和清扫车调度系统。系统采用无人机对路面垃圾和路面颗粒物情况进行探测,清扫车调度系统对无人机收集的数据进行处理分析,筛选出待清扫路段,并基于蚁群算法为清扫车规划行进路径。
2.1北斗定位通信系统
目前北斗三号基本系统已经完成建设,具备全球导航、定位和授时能力,可以达到10m的定位精度,0.2m/s的测速精度,20ns的授时精度,并预计通过建立地基增强站达到厘米级定位。本系统的北斗定位模块采用BDS/GPS联合定位[3],定位精度为2.5m(CEP50)。通过北斗定位通讯系统,用户在PC端即可获取无人机和清扫车的精准位置。
2.2无人机探测系统
无人机探测系统是通过无人机配备的硬件来获取城市道路路面垃圾情况与扬尘情况的系统。探测系统使用多旋翼无人机,无人机搭载PM浓度传感器以及北斗定位传感器。工作时,无人机按规定的路径对城市的道路进行巡逻,通过北斗卫星来定位无人机的实时地理位置,同时传感器能够实时采集该时空下的PM2.5和PM10的浓度并将数据通过3G/4G ISP上传到服务器,传输给车辆调度系统。另一边无人机搭载的相机同时进行航拍,将航拍照片上传给车辆调度系统。
2.3清扫车调度系统
车辆调度系统是整个系统最为关键的一环,负责收集处理数据,发布待清扫信息,进行路径规划。车辆调度系统收集路面航拍照片和道路扬尘数据,通过路面垃圾识别算法找出待清扫道路,通过PM2.5和PM10数据找出路面扬尘超标的道路,综合两项指标判断出需要进行清扫的街道,系统管理层利用ArcGIS Sever地图空间分析与处理功能,为清扫车制定个性化路线,完成道路清洁。
依据北斗模块能在短时间内反馈车辆位置,实时更新清扫车的位置,根据清扫车的行进速度,计算出待清扫道路清扫完成所需的时间。每三分钟更新一次地图,便于管理者根据清扫车作业情况对清洁进行调度。当清扫车完成清洁时,发送信息给调度系统,系统对不同时间不同季节的清洁时间进行记录,作为车辆调度的参考数据之一。
3. 系统设计与实施
3.1路面垃圾识别
本系统采用纹理特征融合和支持向量机(support vector machine,SVM)相结合的方法对道路垃圾图像进行识别。首先对局部二值模式(localbinary patter,LBP)进行改进得到A-LBP算法,然后A-LBP与Uniform LBP算法进行融合形成最终的AD-LBP算法。利用AD-LBP和梯度直方图算法提取图像纹理特征,并结合SVM对道路垃圾图像进行分类识别。其中A-LBP是对LBP的参数进行改正而得到的,包括取得受路面影响较小的阈值和加权系数的选取。U-LBP则是对LBP进行降维得到的。
3.2路面扬尘检测
无人机扬尘检测由控制中心、北斗定位传感器、PM(PM2.5和PM10)浓度传感器、数据记录系统、无人机系统等部分组成。使得PM浓度传感器和北斗定位模块在控制中心的调配下同时工作,得到与位置相关联的PM2.5和PM10浓度数据。
通过PM浓度传感器观测大气颗粒物散射得到侧向散射回波信号图,将其灰度值矩阵提取出,用相应灰度等级光总能量与PM2.5或PM10浓度进行拟合,得到高拟合度的线性关系式,进而求出扬尘的浓度[2]。数据记录模块中,数据以文件形式存储于模块上的SD卡中,通过3G/4G ISP传输到服务器。以现行的《环境空气质量标准》(GB 3095-2012)的二级浓度限值为依据,超出限值(PM10≤150μg/m3 , PM2.5≤75μg/m3)则视为需要清扫。
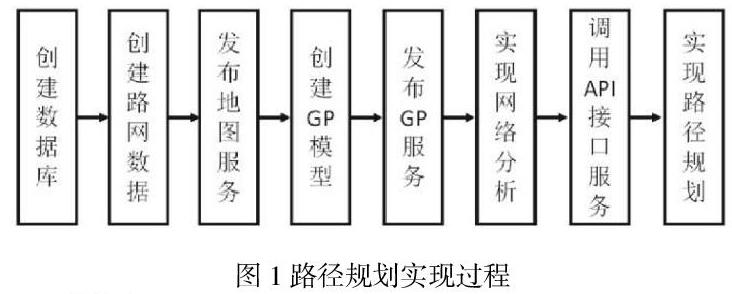
3.3清扫路径规划
清扫车路径规划首先将需要进行清扫的街道标记在路网中,清扫车需要从起点出发,遍历所有待清扫道路并返回起点,本系统采用改进的蚁群算法进行清扫车的路径规划。使用ArcGIS API for JavaScript对清扫车进行路径规划,通过调用该接口,可以建立交互式地图应用。
3.4系统特点
应用基于纹理特征融合与支持向量机方法对道路垃圾图像进行识别,可以准确判断道路是否需要清洁,精准判断需要清扫路段范围,保证城市道路清洁。
无人机道路扬尘检测可获取某一路段连续的颗粒物数据,比测站检测的数据更完整,能更准确地描述某一路段的扬尘情况。
应用北斗定位导航系统对清扫车统一管理,及时反馈所需清扫的路段,并依据蚁群算法确定最佳路径,避免了传统清扫方式所造成的资源浪费以及清扫不及时的问题的出现,提高了工作效率和资源利用率,使城市道路的清洁更准确、及时、有效。
4.结语
本文设计了一个基于北斗和无人机的道路清扫车调度系统,该系统通过北斗卫星获取位置信息,对无人机航线进行规划。无人机通过航摄像机和PM浓度传感器获取地面道路信息,计算机对获取的地面道路信息進行分析处理后判断出需要清扫的路面,清扫车调度系统根据蚁群算法对清扫车进行最优路径规划,清扫车沿指定路线完成道路清扫任务。该系统对城市道路清扫效率的提高以及缓解清扫车不足的问题提供了帮助,具有重要的实用价值。
参考文献:
[1]高晓红.工业仪表与自动化装置[J].2019,(05):110-113
[2]胡淼,李齐良,吴端法等.基于CCD侧向散射激光雷达的PM2.5浓度测量研究[J].光学学报. 2016,36(11):1-6
[3]刘海颖.卫星导航原理与应用[M].北京:国防工业出版社,2013:23-132
[4]赵鹏,沈庭芝,单宝堂.微小型无人机遥感图像应用[J].火力与指挥控制,2009,34(7):158-161
作者简介:
李慧珍(1998.08—),女,汉族,河南省商丘人,郑州市高新区郑州大学,地理信息科学专业本科生,研究方向:地理信息科学专业
张渤琳(1999.01—),女,汉族, 河北省唐山人,郑州市高新区郑州大学,地理信息科学专业本科生,研究方向:地理信息科学专业
肖旖旎(2000.04—),女,汉族,湖南省株洲人,郑州市高新区郑州大学,地理信息科学专业本科生,研究方向:地理信息科学专业
(郑州大学 地球科学与技术学院 河南郑州 450001)
猜你喜欢
软件导刊(2016年11期)2016-12-22
软件导刊(2016年11期)2016-12-22
电脑知识与技术(2016年28期)2016-12-21
人间(2016年26期)2016-11-03
科技视界(2016年18期)2016-11-03
科技视界(2016年22期)2016-10-18
企业导报(2016年9期)2016-05-26
科技视界(2016年4期)2016-02-22
