自适应远光(ADB)系统设计方法
2020-03-13 07:48滕云鹏李志刚闫霍彤贾梦池盛红金
汽车电器 2020年2期
滕云鹏,马 良,李志刚,王 磊,金 平,闫霍彤,贾梦池,盛红金
(一汽轿车股份有限公司奔腾开发院,吉林 长春 130012)
1 系统介绍
1.1 系统描述
ADB(Adaptive Driving Beam)控制系统,是一种自适应远光控制系统,可以自动开启远光,并遮蔽前方同向或对向来车的位置,在有效增加自车照射范围的同时防止造成前方车辆的眩目[1]。ADB照明范围示意如图1所示。

图1 ADB照明范围示意
1.2 系统构成
自适应远光系统由前置摄像头系统 (IFC)、前照灯控制器 (ADB)、LED驱动模块 (LDM)、LED远光模组等组成,如图2所示。
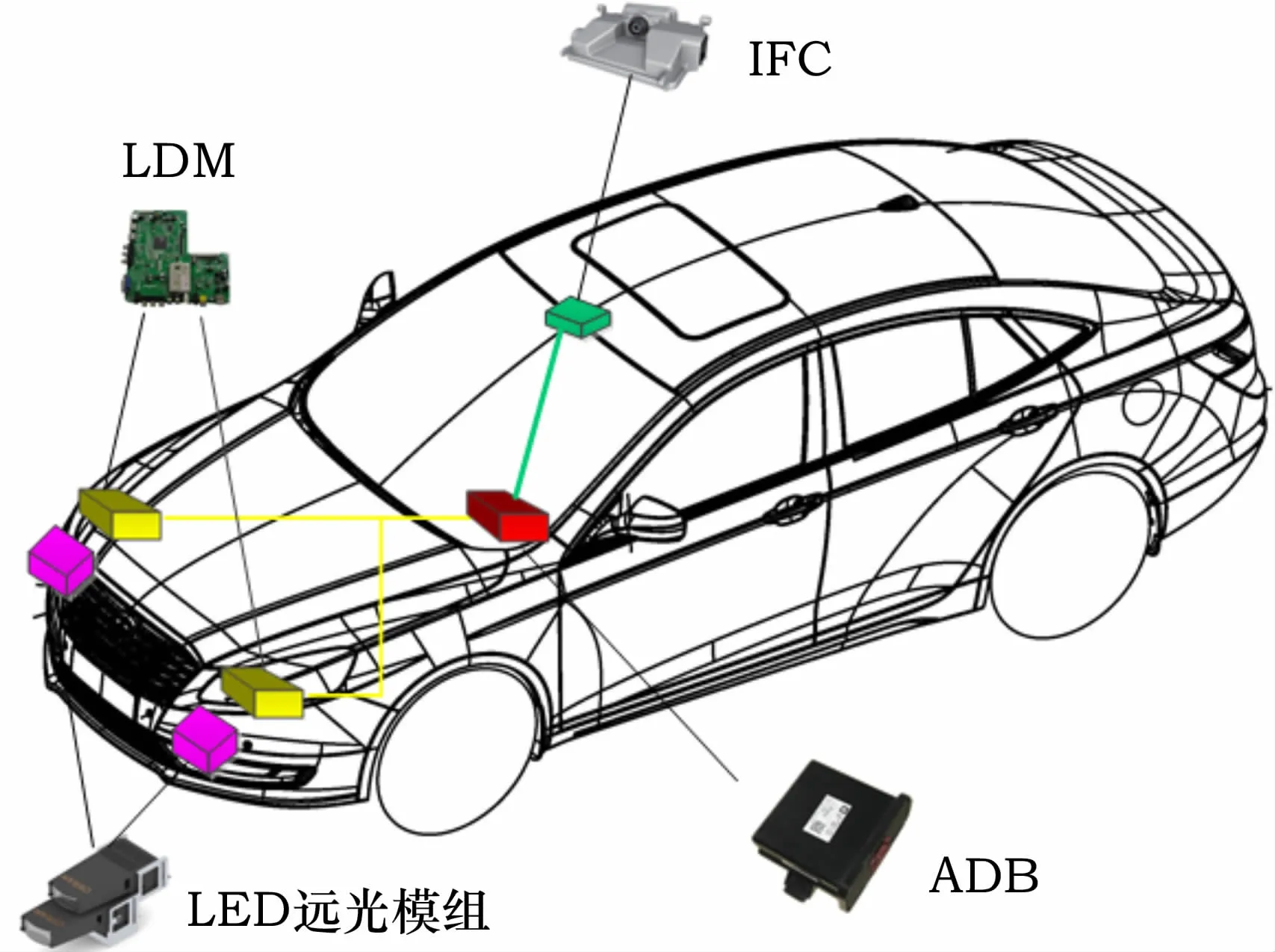
图2 自适应远光系统
1.3 设计/技术难点
光学系统需要实现精确的照明,一是在有效防止眩目的同时实现最大范围的照明;二是保证系统控制逻辑的合理性,平稳的光型变化,能给用户带来最佳的照明感受。
1.4 缩略语及定义 (表1)

表1 缩略语说明
2 系统设计
2.1 设计输入
2.1.1 功能要求 (表2)

表2 功能说明
2.1.2 设计相关参数
1)车身信号。通过车身CAN网络得到自车的ADB功能开关状态、挡位信息 (非倒挡)、灯光开关状态 (非强制远光)、IFC工作状态、速度等信息。
2)环境及道路信息。从IFC或其他传感器处获取周边环境亮度、道路类型、天气状况等信息。
3)前车和对向来车的位置信息。从IFC处获取检测到的前车或对向来车的位置信息。
以上信息如何流转,在设计初期需要与电气架构专业进行沟通。
2.2 系统功能框图 (图3)

图3 系统功能框图
2.3 功能设计
2.3.1 ADB功能
1)分区域控制灯光亮灭
目标:防止对前方对向车辆/同向车辆产生眩目光线。措施:ADB控制器以从IFC发送的车辆位置信息为基础,熄灭可能给前方车辆带来眩目的LED光源。
ADB系统根据IFC提供的前方车辆信息控制远光的分布,前方车辆信息包含前方目标距离、前方目标左边界角度、前方目标右边界角度。前方车辆检测示意图如图4所示。

图4 前方车辆检测示意图
灯光控制示意如图5所示。
2)分区域控制灯光光强
目标:防止远光照射到反光面 (交通指示牌、水洼等)引起的反光对驾驶员产生的眩目。
措施:ADB控制器以从IFC发送的交通指示牌位置信息为基础,降低可能给驾驶员带来眩目的LED光源的亮度。
3)灯光开关时间控制
目标:平稳地控制照明状态的变化,过滤不必要的点灯/熄灭的切换,避免LED突然亮灭造成驾驶员的不适感。
措施:将点亮和熄灭过程分为4个阶段,控制各区域内的持续时间。相关参数,需要体现在控制策略或图纸上。最终进行整车标定,明确相关参数。
点亮、熄灭各区间示意如图6所示。
T1区间控制:当LED需要从熄灭到点亮时,不是立即点亮LED,而是延时一段时间T1;T1时间过后如果仍然需要点亮该LED,则开始点亮该LED。延时控制还可以有效抑制由于系统输入的车辆位置不稳定而导致的LED频闪,给驾驶员以更好的照明体验。

图5 灯光控制示意图

图6 点亮、熄灭各区间示意图
T2区间控制:当LED开始点亮时,不是立即使其点亮到100%亮度,而是慢慢将其点亮,从而有一个渐亮的效果。LED从开始点亮到100%全亮的变化时间为T2。渐亮控制可以避免驾驶员的不适感,给驾驶员以更好的照明体验。
T3区间控制:当LED需要从亮的状态熄灭时,延时一段时间T3。由于T3的延时可能导致前方车辆不能及时遮蔽,从而导致对前车的眩目,因此本系统暂时不采用T3的延时控制策略。
T4区间控制:当LED开始熄灭时,不是立即将其熄灭,而是慢慢将其熄灭,从而有一个渐灭的效果。以符合驾驶员感觉的速度熄灭,实现良好的工作感觉。LED从开始熄灭到完全熄灭的变化时间为T4。T4的控制时间不能很长,否则会影响到对前方车辆的遮蔽效果。
4)安全模式
当系统发生故障,或者某些输入CAN信号丢失,从而导致无法判别自车的最佳照明模式时,系统应回到默认近光模式,保证最小的照明安全。这时远光所有照明区域应该全部关闭。
2.3.2 通信功能
ADB控制器通过高速CAN传输和接收信号,能够根据功能要求,通过交互界面在高速CAN总线上进行信号交互。
2.3.3 诊断功能
1)故障诊断。控制单元需具备网络故障诊断功能。
2)程序刷新要求。支持BootLoader程序烧写,符合Boot-Loader操作规范要求。
3)在升级中断的情况下,可以重新升级。功能和诊断数据保存在非临时存储区中 (例如:EEPROM、Flash等)。
2.4 休眠唤醒功能
系统的休眠和唤醒由通信使能接口控制。当通信使能接口为高电平时,ADB控制器被唤醒,ADB控制器软件确认唤醒条件满足后,通过在私有CAN上发送唤醒报文将前照灯唤醒,系统进入正常工作状态;当通信使能接口为低电平时,ADB控制器通过私有CAN发送休眠信号,使前照灯进入休眠状态;若通信使能接口为非法电平时,ADB控制器保持之前的休眠/唤醒状态。
ADB控制器应提供用于CAN总线唤醒的使能端,CAN使能端信号参数要求见表3。
2.5 接口定义
1)供电电压说明见表4。
2)短路/过电压保护:①短路保护;②过电压保护。
3)连接器。连接器的选择应保证ADB控制单元在下述情况无性能下降发生:①与车辆蓄电池连接断开或断开或再连接;②在搭铁线连接前,先与蓄电池正极端 (B+)连接。

表3 CAN使能端信号参数列表

表4 供电电压说明
3 结语
自适应远光 (ADB)技术已经成为汽车照明的发展趋势。上述内容对自适应远光 (ADB)设计方法进行了介绍,可以指导该技术在车型上应用,为用户带来最佳照明体验,为整车打造亮点。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
快乐作文(1.2年级)(2022年5期)2022-05-31
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
三悦文摘·教育学刊(2021年52期)2021-04-27
网络空间安全(2019年8期)2019-03-18
软件导刊(2016年7期)2016-05-14
中学科技(2015年11期)2015-11-25