基于伺服的牛仔裤贴袋机控制系统设计
2020-03-16 08:26唐郅佳杨云飞
科技创新导报 2020年33期
唐郅佳 杨云飞
摘 要:本文以牛仔裤口袋贴袋机为工程背景,以S7-200 PLC为核心,根据控制功能要求,合理选择PLC型号、输入输出模块等器件构建硬件控制系统。编写PLC控制程序,实现对贴袋机各运动部件和气动电磁阀的各项控制。为提高控制精度,采用了伺服系统技术控制X轴和Y轴的两轴联动,设计了基于数控插补技术的伺服控制程序。运用MCGS开发平台设计触摸屏监控画面,所设计画面简洁美观便于操作。
关键词:PLC 贴袋机 插补 伺服
中图分类号:TP273 文献标识码:A 文章编号:1674-098X(2020)11(c)-0047-03
Design of Control System of Jeans Pocket Patching Machine Based on Servo Technology
TANG Zhijia YANG Yunfei
(School of Electric and Automatic Engineering, Changshu Institute of Technology, Changshu, Jiangsu Province, 215500 China)
Abstract: This paper takes the jeans pocket patching machine as the engineering background, takes the S7-200 PLC as the core, and selects the PLC model, input and output module and other devices to construct the hardware control system according to the control function requirements. Compile PLC control program to realize various control of the moving parts of the bag attaching machine and the pneumatic solenoid valve. In order to improve the control accuracy, the servo system technology is used to control the two-axis linkage movement of X axis and Y axis, and the servo control program for CNC interpolation technology is designed. By using the MCGS development platform, the design of the touch screen monitoring screen is designed. The designed monitoring screen is simple, beautiful and easy to operate.
Key Words: PLC; Jeans pocket patching machine; CNC interpolation; Servo
傳统的牛仔裤口袋采用人工缝制,不仅工作效率低, 而且可靠性不高。为适应现代化生产的需要,开发了专门的贴袋机缝纫设备,相比于传统缝纫加工,其效率提高了好几倍。
牛仔裤口袋贴袋机主要流程分为折料、取料、缝制和下料4个部分。当贴袋机检测到折料工作区域有牛仔裤和口袋布料时,设备会自动将牛仔裤和口袋布料固定住,折刀会作用于固定好的口袋布料边缘,将口袋布料向下折叠,并将其固定在牛仔裤缝纫区域,缝纫压板经过加长导轨将准备好缝纫的牛仔裤运送到缝纫机处缝纫,缝纫完成后经下料机构将牛仔裤自动取出。
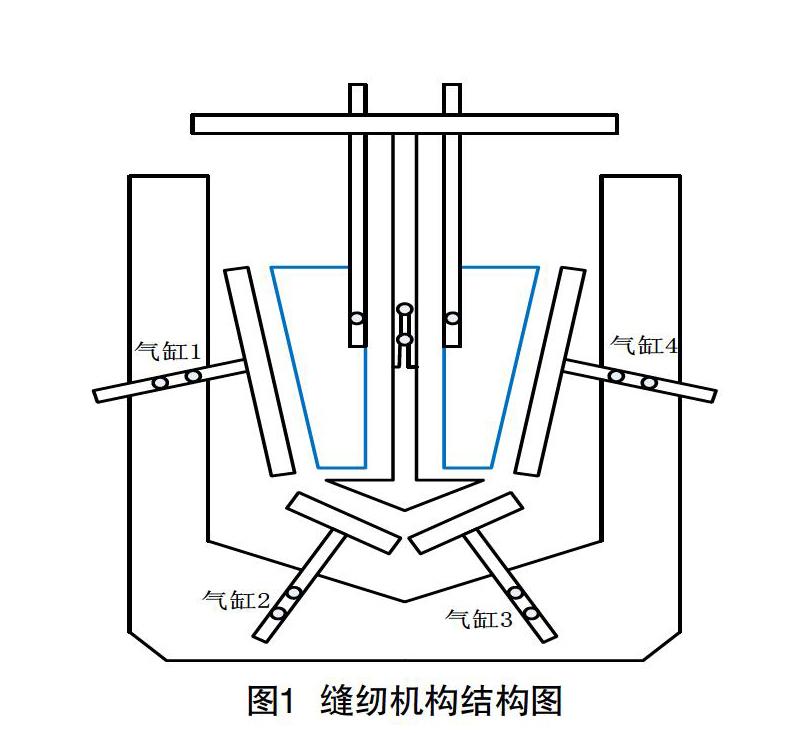
1 缝纫机构
缝纫机构(见图1)由缝纫和压框协同工作完成。压框的主要作用是在缝纫时牢牢的压住布料,确保在缝纫时口袋与服装规定的缝合位置相匹配。压框内还有压爪,通过调整压爪来完成双线缝制口袋的做工要求。双线缝纫工艺的顺序为:(1)压框定位准备外圈缝纫;(2)外圈缝纫结束,压爪抬起,当压爪抬起后,开启压爪气缸,紧缩并下压压爪;(3)准备缝纫外圈。
2 控制系统总体结构设计
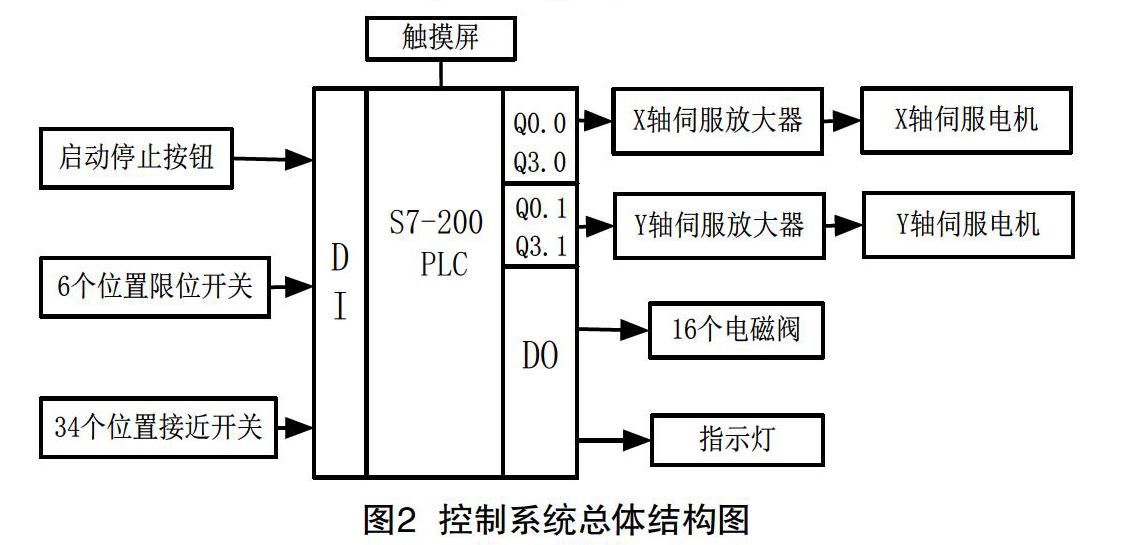
选用S7-200 PLC[1-3]作为主控制器,具备高速脉冲输出能力,整个系统基于模块化设计,安装简单、配置灵活,拓展方便。贴袋机控制系统包括触摸屏人机交互界面[4-5],可编程控制器,X、Y轴伺服[6-7]放大器和伺服电机各一套,位置开关和接近开关等以及缝纫路径插补控制等,Q0.0的脉冲控制X轴伺服电机运动,Q0.1的脉冲控制Y轴伺服电机运动,两个伺服电机协同工作,整个控制系统构成如图2所示。
3 控制程序设计
3.1 缝纫轨迹
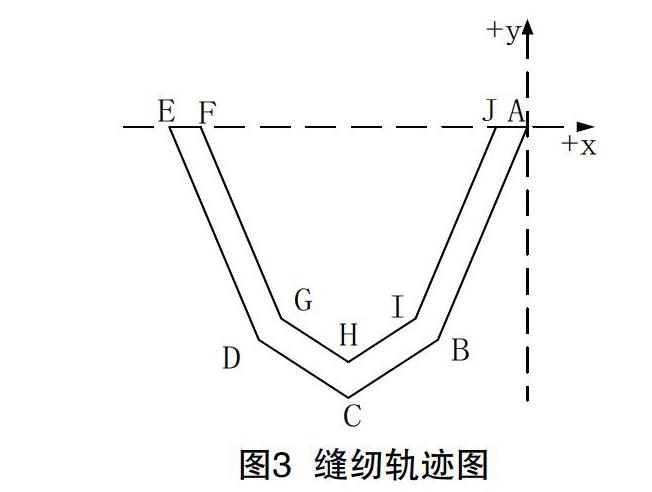
牛仔裤和布袋压紧在缝纫机构上,两个伺服电机驱动缝纫机构运动,缝纫机构和缝纫针作相对运动实现缝纫路线的缝纫工作。缝纫轨迹如图3所示,由A-B-C-D-E-F-G-A构成。整个缝纫路线在第3象限,但7个不同的缝纫路线,因直线终点相对于起点的方向不同,插补[8-10]时需按不同的象限插补方法。
3.2 逐點比较法插补
对于第一象限的直线OA,起点为坐标原点,终点A坐标(Xe,Ye),m(Xm,Ym)为加工点(动点),m在OA直线上,则:Xm*Ye+=Ym*Xe,令Fm=YmXe-XmYe为直线插补的判别式,若Fm=0,表明m点在直线OA上;若Fm>0,表明m点在直线OA上方的m′处;反之m点在直线OA下方的m″处。
对于第一象限直线,从起点出发,当Fm≧0时,沿+X方向走一步,当Fm<0时,沿+Y方向走一步,当两方向所走的步数与终点坐标(Xe,Ye)相等时,发出到达终点信号,停止插补。
对于其他象限的插补方法,与第1象限的插补方法相类似,根据Fm≥0时或Fm<0时,按照走步方向为靠近所插补直线(即减小当前所在位置与目标直线之间误差)的原则进行。
3.3 插补控制程序设计
根据插补方法设计插补程序,当终点坐标给定不同值时,程序按照线段坐标及线段的方向进行插补运动。插补程序流程如图4。
插补程序如下:
LD X轴工作:M3.2
PLS 0 /X轴伺服输出脉冲当量1
-D 1, N:VD104 /终点判别N自减1
LD Y轴工作:M3.3
PLS 1 /X轴伺服输出脉冲当量1
-D 1, N:VD104 /终点判别N自减1
LDD= N:VD104, 0
= M3.4 /当到达线段终点插补停止
TON T32, 100 /延时0.1S,
LD T32 /重新赋值下一条线段的终点判别N
MOVD Y轴终点坐标:VD88, N:VD104
+D X轴终点坐标:VD84, N:VD104
LD M3.4 /线段标志位加1,进入下一条线段号
EU
INCD 标志位:MD16
LDD>= F:VD100, 0 /X轴插补
AN M3.4
-D Y轴终点坐标:VD88, F:VD100
= X轴工作:M3.2
LDD< F:VD100, 0 /Y轴插补
AN M3.4
+D X轴终点坐标:VD84, F:VD100
= Y轴工作:M3.3
4 调试
本程序经实验室调试,实现了所要求的插补功能,整个程序运行正常,调试用设备如图5所示,插补路径控制的调试结果如图6所示。
参考文献
[1] 应帅.基于PLC的机械手臂控制系统设计的研究[J].科技创新导报,2017(36):81-83.
[2] 胡利军.PLC在机电一体化生产系统中的运用研究[J] .科技创新导报,2019(23):85-86.
[3] 张固,刘小勤,沐超,等.整体式PLC优化控制[J].仪表技术与传感器,2020(4):27-30.
[4] 张勇.PLC和触摸屏组合控制系统的应用研究[J]. 科技创新导报,2019(7):87-90.
[5] 王永,窦岩.基于PLC及触摸屏的智能并联电梯检修培训装置开发[J].科技创新导报,2019(5):2-3.
[6] 罗亚鹏.S7-200 PLC在伺服电机位置控制中的应用探讨[J].自动化应用,2019(8):3-5.
[7] 李子昀.伺服电机位置控制中S7-200PLC的实践分析[J].湖北农机化,2019(13):93-94.
[8] 胡宪委.伺服电机优化选型[J].自动化应用,2018(3):136-138.
[9] 廖常初.PLC编程及应用[M].5版:北京:机械工业出版社,2019.
[10] 朱晓春,吴祥,任皓.数控技术[M].2版:北京:机械工业出版社,2019.