智能管道清理机器人
2020-03-21 11:52程文博汤梓蓬武圣杰孙黎马占森韩晓静
工程技术与管理 2020年1期
程文博 汤梓蓬 武圣杰 孙黎 马占森 韩晓静
沈阳科技学院,中国·辽宁 沈阳 110000
智能;下水道;matlab;超声波探测;单片机
1 引言
1.1 项目背景
随着城市快速的发展,城市人口增多,大量的生活垃圾给下水道排污带来巨大压力,下水道因此经常堵塞,影响了城市卫生和发展。现有的疏通方式成本过高,就简单的家庭疏通就需要百元,大型的疏通车价格就更加昂贵,一次就需要几千元,其疏通设备造价竟达到上万元,还需要大量的人力来完成[1]。而本团队研究的设备成本在800元左右,操作简单便捷,有很大的市场前景。鉴于此,本团队想设计并制造出一样机器,让它去解决城市下水道道清理、疏通、探测难题,并扩展到下水道道电缆铺设、下水道墙壁探测、矿洞检测以及考古、矿洞探测等地下领域。
1.2 国际研究进展
1.2.1 中国现状
城市中的下水道担负着越来越大的排污责任,下水道因此经常堵塞,影响了城市卫生和发展。但传统人工清理,工作量大、环境恶劣、效率低、效果不佳,而用现代联合清污车清理,针对大型管道效率高、效果好,但对分布更广、更易堵塞的小型管道而言,清理方式不够灵活,成本过高,且中国下水道清理疏通探测机器人的发展研制方面还没有自己的成型产品。
1.2.2 国际现状
在欧美发达国家,他们城市的下水道污物的降解能力比较强,且发达国家起步更早,他们的清理污物设备已经逐渐完善,并且有足够的资金为维修维护提供保障。因此,在下水管道清理方面,发达国家走在了中国的前面。对下水管道的清理,相关人员应该去面对这个问题,并且中国的市场需求也是非常巨大的。所以,智能下水管道多功能装置的市场潜力非常大,并且笔者的装置不仅仅局限于下水道,还可扩展用于地下考古、矿洞检测等地下领域。
2 研究目的和基本思路
2.1 研究目的
日常生活中,地下管道时常有大量的生活垃圾堵塞下水道,会有大量的积水,给人们造成一定的困扰。为解决这一问题,笔者设计了一款装置,装置会通过机械手臂与水枪冲洗作为清洁手段,对垃圾进行收取和清洗,并采用了超声波传感器和摄像头来探测管内情况,做出相应操作,由一人就可以完成。为了保障城市的卫生和面貌,保障路人的安全,保障施工人员的人身安全,减少施工人员工作压力,提高清理疏通的工作效率。
2.2 研究的基本思路
为了使其能够在下水道中自由运动,笔者设计制造了一种装置,它大体由车体、机械臂、摄像头和水枪等组成。由蓄电池做主驱动力,在此装置中笔者还采用了超声波传感器来探测管内情况,测算出与障碍物的距离等,操作人员可以快速的了解到管道内的情况,从而做出准确的选择来达到清理并疏通管道中的堵塞物以及探测下水道内情况目的。
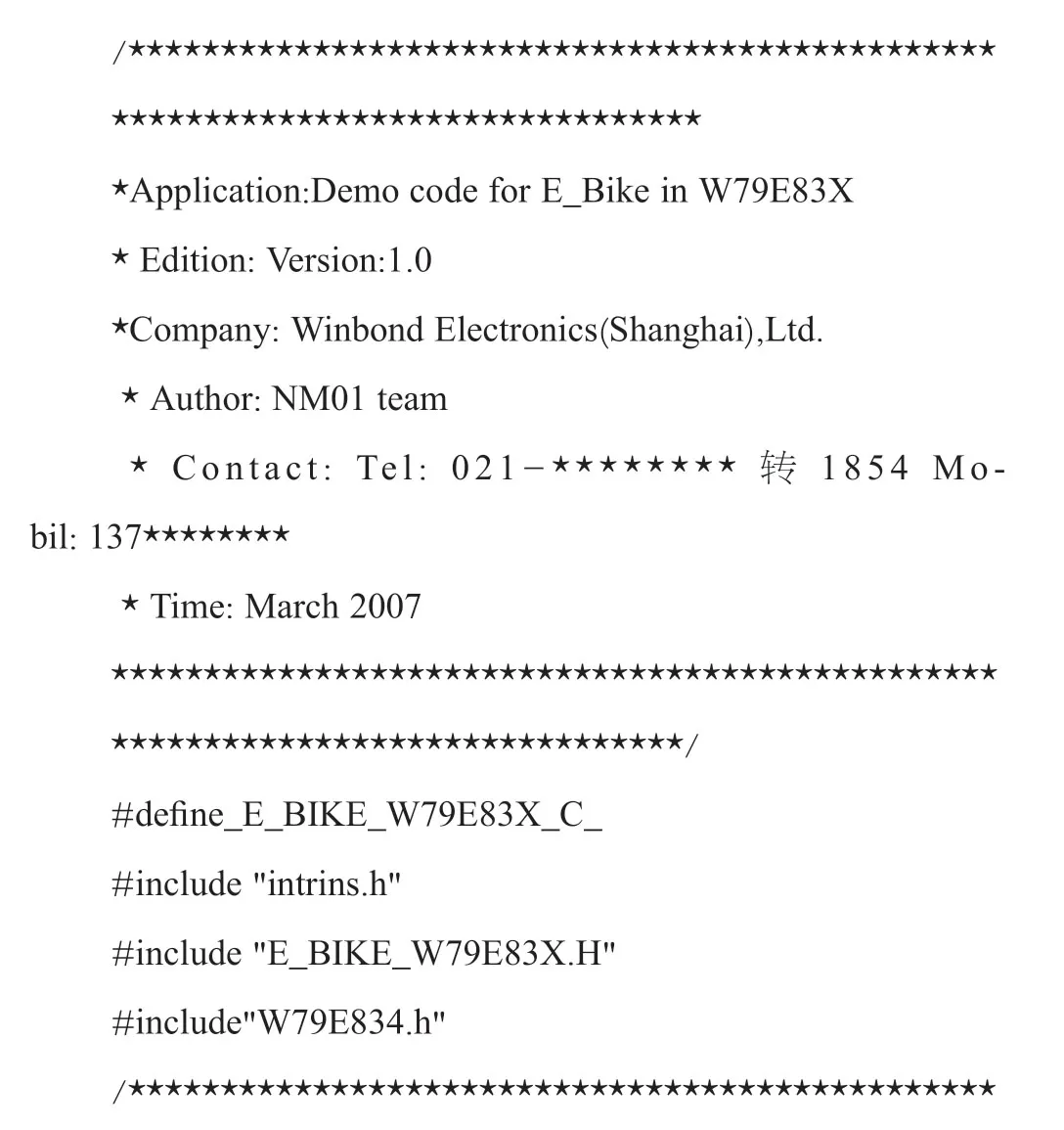
由于选择蓄电池为主驱动力,来为装置的驱动以及机械臂提供动力,原理结构图如图1所示(控制芯片程序见附录一)。

图1 原理结构图
此装置采用HC-SR04 超声波传感器测距。超声波传感器有敏感范围大,无视觉盲区,不受障碍物干扰等特点(控制程序见附录二)。

图2 HC-SR04 超声波传感器
3 项目创新点及优势
3.1 项目创新点
(1)该装置不同于传统的人工清理方式,更加安全。人工清理方式具有极大的不确定性,当人们在下水道工作时,由于环境的昏暗,可能会碰到一些危险的东西;如若遭遇塌方事故,后果不堪设想。
(2)采用了机械手臂与水枪冲洗作为清洁手段,大大提高了工作效率,能够轻松解决下水道垃圾堵塞问题。
(3)此装置采用了超声波传感器和摄像头来探测管内情况,超声波传感器测量出与障碍物的距离,配合摄像头操作人员可以快速的了解到管道内的情况,从而做出准确的选择。
(4)此装置选择蓄电池作为主驱动力,符合国家可持续发展战略,绿色环保节能。
(5)此装置具有多功能性,实用性极强,且造价经济实惠800元左右,可用于矿洞检测,考古等地下领域。
3.2 项目具体优势
(1)安全性
2016年漳州一公司清理吓唬四点发生事故,造成一死一伤;2018年8月9日,在新城两名工人清理污水管道发生中毒,一人死亡。
此装置可彻底代替人工进行地下道的清理、疏通等工作,避免了事故的发生。
(2)成本低
此装置的造价在800元左右,远远低于目前市场上清理下水道的大型机器费用以及人工费用。
(3)使用寿命长
此装置采用蓄电池为主驱动力,符合可持续发展战略,可进行多次使用。
(4)实用性
此装置装备有超声波传感器、摄像头、机械手臂等,在一定程度上符合多种地下领域的使用,例:考古探测、矿洞探测等等
4 主程序的设计
4.1 初始化模块
初始化模块的主要任务是在单片机复位后为主程序设置正确的变量,中断及定时器的设置方式和控制字,将部分内存单元清零,开中断及定时器,将EEPROM中的数据调入内存。
4.2 主程序模块
系统的软件由一个主程序和若干子程序构成,主程序的主要功能是对所需要的参数进行初始化,设定程序执行过程中用到的相关变量,分配寄存器,然后再由各中断的要求调用相应的处理模块和子程序,主程序的流程图如图3所示。
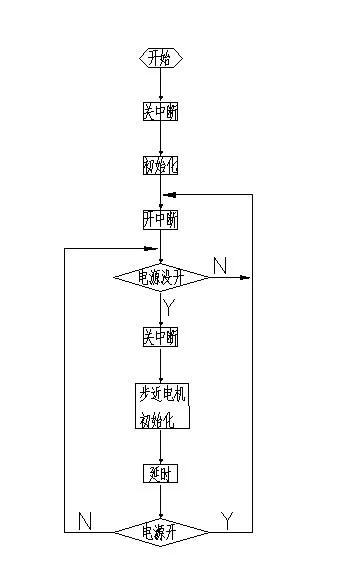
图3 主程序的流程图
主程序的主要作用如下:
(1)定义系统运行过程中所需的变量。
(2)分配硬件系统所提供的相关资料,如寄存器、ROM 以及中断资源和堆栈等。
(3)完成系统的自检,确保程序的执行无误。
(4)在程序的运行过程中,按要求依次完成对系统各个模块的调用,并将程序的运行结果提供给用户。[2]
(5)在各模块的调用过程中,实现对调用过程的现场保护,避免程序跑飞,确保程序正确执行,保存系统运行过程中的必要参数。
4.3 中断处理模块
中断处理模块用于获取程序所需的各种参数。在主程序运行当中,如果有中断请求,即跳转到其他所要处理的子程序模央进行程序运行。一般情况下,中断程序中对数据一般只做简单的读取和赋值工作,不对数据进行处理与计算,缩短中断程序的运行时间,提高系统响应中断的实时性。
5 技术要点和技术指标
5.1 技术要点
机器进行自动运行时,做好自动控制是非常重要的,要达到稳定、快速和准确三个方面。因此采用了matlab算法进行轨迹运算和误差大小计算,让机器车在工作时尽量达到零失误。机器进行自动运行时,做好自动控制是非常重要的,要达到稳定、快速和准确三个方面,所以实现采用matlab算法进行轨迹运算和误差大小计算,让机器车在工作时尽量达到零失误。
5.2 关键技术指标
在可视化领域将图像信息进行高效精准识别并处理、使机器在运行时达到稳准快的高效率工作、采用matlab算法对模拟传感信号计算处理、对传感器及机械手臂的准确控制。
6 作品的设计和实验
6.1 外观设计
装置初期外观图如图4所示。机器车最上方是摄像头,为操作者提供视野,防止操作出现失误;摄像头下方和机器车两侧为传感器,感应与前方及两侧墙壁的距离;机器车前方分别为机械手臂和高压水枪,以及两侧的车轮。

图4 外观图
6.2 工作流程

6.3 工作原理
6.3.1 超声波探测原理
HC-SR04 超声波传感器测距功能:提供50px--450m的非接触式距离感测功能。组成:超声波发射器、接收器与控制电路。基本工作原理:超声波测距模块一触发信号后发射超声波,当超声波投射到物体而反射回来时,模块输出一回响信号,以触发信号和回响信号间的时间差,来判定物体的距离。
超声波传感器工作原理:
① 采用I/O 触发测距,给至少10us的高电平信号。
② 模块自动发送8个40kHZ的方波,自动检测是否有信号返回。
③ 有信号返回,通过I/O 输出一高电平,高电平持续的时间就是超声波从发射到返回的时间。
测试距离=(高电平时间×声速(340M/S))/2。

图5 超声波传感器工作原理1

图6 超声波传感器工作原理2
超声波传感器主要利用多普勒原理,通过晶振向外发射超过人体能感知的高频超声波;一般选用25~40kHz 波,然后控制模块检测反射回来波的频率,如果区域内有物体运动,反射波频率就会有轻微的波动,即多普勒效应,以此来判断照明区域的物体移动,从而达到控制开关的目的。
超声波的纵向振荡特性,可以在气体、液体及固体中传播且其传播速度不同;它还有折射和反射现象,在空气中传播其频率较低,衰减较快;而在固体、液体中则衰减较小,传播较远。超声波传感器正是利用超声波的这些特性。[3]

图7 超声波传播示意图

图8 超声波传感器接线图
6.3.2 装置驱动控制器原理
驱动控制器是通过PWM 脉宽调制输出电压的大小实现电机快慢的调整:控制器满足锁线电压和主回路电压供给整装置后,一般都会有一个开机自检的过程,检查控制器的霍尔,相线,转向,机械手臂等等周边组件是否正常,随后进入待机状态,转动提供转动信号,摁下刹车键把切断转向信号后机械刹车阻碍轮子转动,控制器根据电机霍尔元件所处的位置而控制3 相6 组功率MOS 管的开启。

图9 装置驱动控制器原理
所有的功能信号(客户的操作指令)通过装置控制的不同的操作开关,经过引线传输到控制器端,控制器内部集成芯片运算后发出动作指令,控制器同样也有电源电路提供整板的工作电压,由于控制器通过和控制很大的驱动电路,电流检测保护电路也是非常重要的部分,另外芯片内部写有程序(附录二),可以根据写入不同的程序实现不同的功能,控制器芯片主要的工作分为功能实现,状态监测,电机控制。
驱动原理图如下:

图10 驱动原理图
6.4 技术实现解析
6.4.1 matlab算法
采用matlab算法对模拟传感信号计算处理,形成参数与控制系统形成函数图像来接近稳准快的高效率工作。对于机器的可视化部分是由摄像头加传感器部分组成,采用先进的Simulink可视化仿真工具来对机器车输入的数字信号进行处理并实现动态系统建模仿真和分析数据。
6.4.2 单片机接收
单片机接收到操作者数字电信号,通过转换器,把信号转换为指令,调动机器车运动方向,使机器车更好的运作。
6.5 系统设计
6.5.1 主控制板
对于本系统,主控制板需满足以下条件:
(1)单片机核心性能足够高,保证无延迟,反应灵敏。
(2)单片机核心芯片稳定性高,保证长时间运行的稳定性。
(3)主控制板全部采用贴片元件,节省空间,提高稳定性。
(4)使用无铅焊锡和免洗助焊剂,减少环境污染。
(5)使用6层或6层以上PCB(印刷电路板),保证整块电路板电气性能良好。
6.5.2 单片机选型
综合考虑地下探测装置的工作环境,控制器主控芯片应该具有高速的数据处理性能、丰富的硬件接口、低成本和可靠性高的特点。[4]
选用MC9S12XE 系列单片机,它具备32 位单片机的性能和16 位构架的所有现有优势。它具备高速总线时钟及丰富外围接口,有丰富的寻址方式,具有7个中断优先级和117个中断源,内核支持优先级调度,同时增加了协处理器XGATE 模块,具有高效、低成本和低功耗等优势,采用它作为主控芯片能够满足整车控制器功能需求。
MC9S12XEP100 具有如下特性:
(1)通过协处理器XGATE 模块可建立虚拟外设,这能够提高整体性能。
(2)总线频率达到50MHz,而XGATE 则高达100MHz。
(3)具有模数转换器(ADC),12位分辨率和3μs 转换时间。
(4)通过BDM接口能够实现系统的在线调试。
(5)有2个IIC接口、个SPI接口、5个MSCAN 模块和8个SCI接口。
(6)片内具有4KB的EEPROM,64KB的RAM和1MB的Flash。
(7)支持µC OS/ −Ⅱ操作系统。
6.5.3 电源电路
电源电路为各子模块供电,是任何一个系统中都不可缺少的重要组成部分。一个良好设计的电源电路应该具有较宽的输入电压和工作温度范围,能够抵抗车载电源的瞬间扰动,同时应该具备好的电路布局和较高的效率,这样可以降低发热量,保证能为系统稳定可靠的供电。
6.6 可行性测试
地下探测装置在对一些未知环境进行勘测时至关重要,也是保障人身安全的首要选择。一个作用强大、功能多样的探测装置可以帮助人们更好的开采、清理地下未知地形及各种管道的清理,可以避免因坍塌、缺氧等意外情况而出现人身安全问题的情况。经过应用测试,本系统可以通过灵活的运动方向调整系统,完全准确的选择合适的路线前进。动力驱动选择的是蓄电池,由于长期在地底下工作,所以无法使用太阳能充电,这里选择蓄电池是作为合适的。出现故障时,该装置自动按原路线返回,回到地面,方便维修。
附录
附录一:控制芯片程序



附录二:超声波探测程序

猜你喜欢
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
大科技·百科新说(2018年10期)2018-01-15
军事文摘·科学少年(2016年7期)2016-09-20
中学生博览(2016年10期)2016-09-10
电子制作(2016年21期)2016-05-17