面向地震应急的UAV快拼软件比较分析
——以辽宁大连城岭村为例
2020-04-03 07:21孔祥雪赵明朝王万宁
防灾减灾学报 2020年1期
于 浩,孔祥雪,冯 石,赵明朝,王万宁
(辽宁省地震局,辽宁 沈阳 110034)
0 引言
无人机遥感技术是利用先进的无人驾驶飞行器技术、遥感传感器技术、遥测遥控技术、通讯技术、GPS差分定位技术和遥感应用技术完成自动化、智能化、专业化快速获取国土、资源和环境等空间遥感信息,实现遥感数据处理、建模和应用分析的一门应用技术。近年来小型消费级无人机以低成本、高效率、飞行灵活等优势迅速占领市场,现已在无人机在地形测绘中的应用研究(冉洪斌等)、旋翼无人机在建筑物抗震能力调查中的应用(和仕芳,邓树荣等)、海岸与冰川监视(Bhardwaj等)等领域发挥着不可取代的作用,无人机独特的优势及应用领域的扩展,已成为研究的热点课题。相较于以往无人机遥感影像数据的姿态相对较差、像幅小、数量多、处理相对困难,无法在地震应急中快速提供成果,而如今无人机影像处理商用软件发展迅猛、智能化程度大幅提高、人工干预少、实施部分项目无需地面控制点,这对应急保障无人机航摄数据高效率的后续处理提供了有力的技术支撑,也大大增加了无人机快速获取地形数据的实用性。
本文选取了三款市场应用较为成熟的无人机商用拼图软件,三款软件各有优势,通过实验设计并结合地震应急现场与后方指挥平台的实际使用需求,来完成择优选取前后方应用产品的工作任务。
1 研究区域与数据准备
1.1研究区域
本次研究区域选取辽宁省大连市长海县大长山岛镇城岭村为实验场地开展飞行作业实验,其经度为122.527°E,纬度为39.295°N,此处属于大长山岛以西飞行开放区域,地形起伏变化较大,植被覆盖范围60~65%,区域测量范围0.3177平方公里,研究区域视野开阔,卫星信号不受干扰,人类活动较少,有利于开展无人机飞行采集实验(图1)。
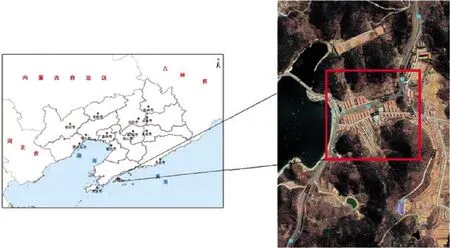
图1研究区位置Fig.1 The study area
1.2测区数据
本实验使用大疆公司精灵4pro V2.0版无人机,按应用领域属于小型消费级无人机,无人机具体参数见表1,实验采用智能飞行控制软件DJI Pilot设置飞行参数,控制无人机自动起飞并执行航拍任务,飞机姿态信息设置为飞行高度设置100m、飞行速度控制5m/s,为了进一步减少无人机GPS精度和相机平台不稳定造成的误差,该实验中把航向重叠率设置为80%,旁向重叠率设置为80%,主航向角度设置为0°边距设置为20m,为模拟地震应急航拍场景,本次实验不设置地面控制点(GCP),设置完成后按照地面无线电遥控指令上传无人机自动开始航摄任务。
本次实验影像数据获取时间为2019年7月31日,天气晴朗,风力3-4级,飞行架次1次,航线长度6125米,共采集308张照片(EXIF元数据包含GPS标签),耗时30分钟。
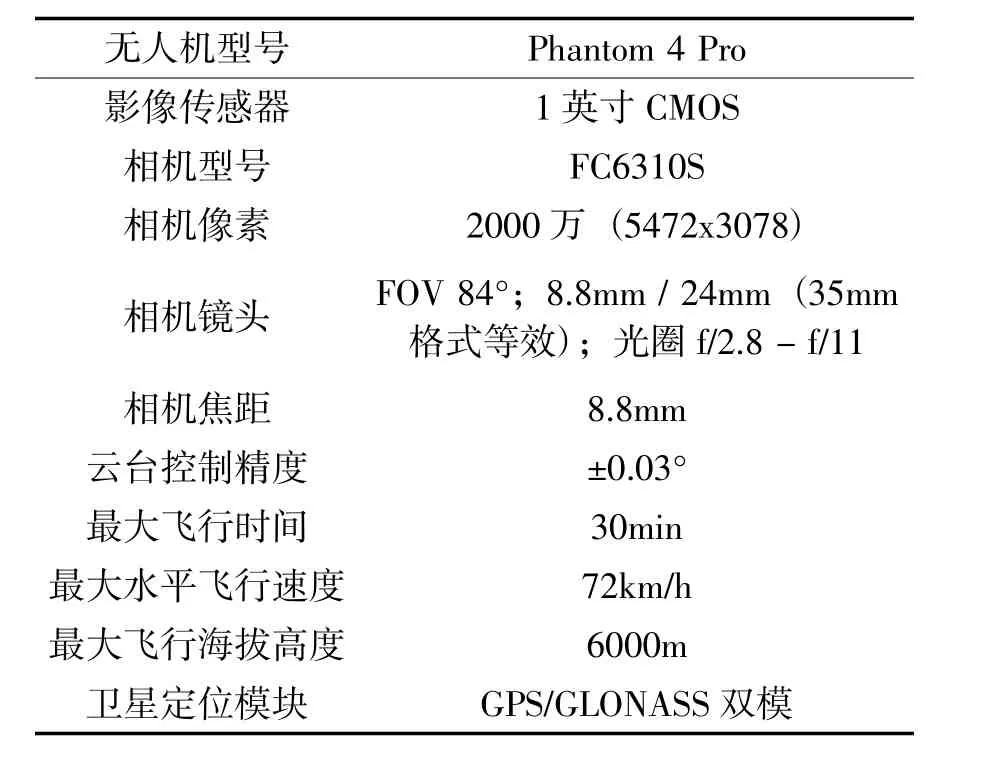
表1无人机参数表
2 研究内容
本次实验采用Pix4D、smart3D、photoscan三款成熟的无人机影像商用处理软件,使用同一台图形处理工作站分别处理测区影像数据,通过生成质检报告比对处理流程、耗时、正射精度、三维建模四项任务指标,产出分析结果,完成择优选取前后方应用产品的工作任务。
2.1快拼软件
Pix4Dmapper是结合丰富的遥感图像处理、摄影测量及企业级空间信息等技术开发的全自动快速无人机数据处理软件,其优势在于内置大量相机参数数据库,且支持不同架次、不同相机、不同高度的数据同时处理,处理过程中支持调用处理器内核与内存资源开展数据运算,智能化程度较高。Photoscan是由俄罗斯生产的自动生成正射影像图的摄影测量处理软件。其优势在于软件对照片质量要求低,在无须外方位元素和相机校准的前提下能够顺利完成像片对齐,拼接正射影像(DOM)。且支持全过程分布式计算;支持多相机计算;支持无人机数码影像、倾斜影像等各类影像的自动空三处理;操作流程简单容易上手。Smart3D是在图形运算单元GPU的基础上研发的一种快速建模产品。其能够在图片质量满足相关标准的前提下,自动化、快速地实施建模操作。同时其还能够对多种不同类型的数据成果进行输出,能够实现对多种数据源的兼容。其优势在于三维建模精度较高,但智能化程度较低,需要人工干预。
2.2处理流程
本实验采用同一台工作站进行影像处理工作,工作站参数如表2所示。
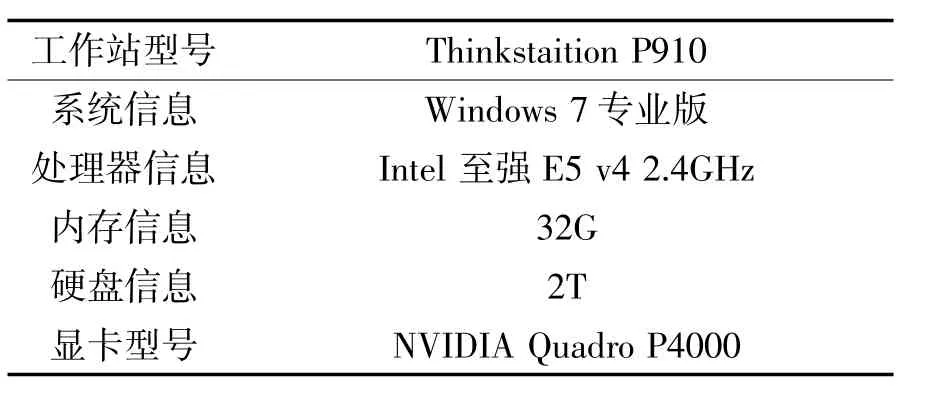
表2工作站参数表
2.2.1 Pix4Dmapper
Pix4dmapper影像处理流程为初始化处理—点云及纹理处理-DSM、正射影像指数设定—资源分配设定。首先导入原始影像数据及POS数据,定义输出数据坐标系,软件可自动识别相机型号,也可自定义相机参数,修改相机焦距、像主点等,在初始化处理中,特征点图像比例选择快速检测,软件可自动进行空三、区域网平差计算,点云纹理设置包括点密度、三维网格纹理数目、纹理大小、输出格式设置,正射影像指数设置中包括分辨率、DSM计算方法、生成格式设置,资源分配设置包括可用于处理的最大资源设定(内存、CPU线程、GPU开启)等设置,最后快速生成正射影像图和数字表面模型,后期可用镶嵌图编辑器对影像进行修改研究。处理流程与参数设置如表3所示。
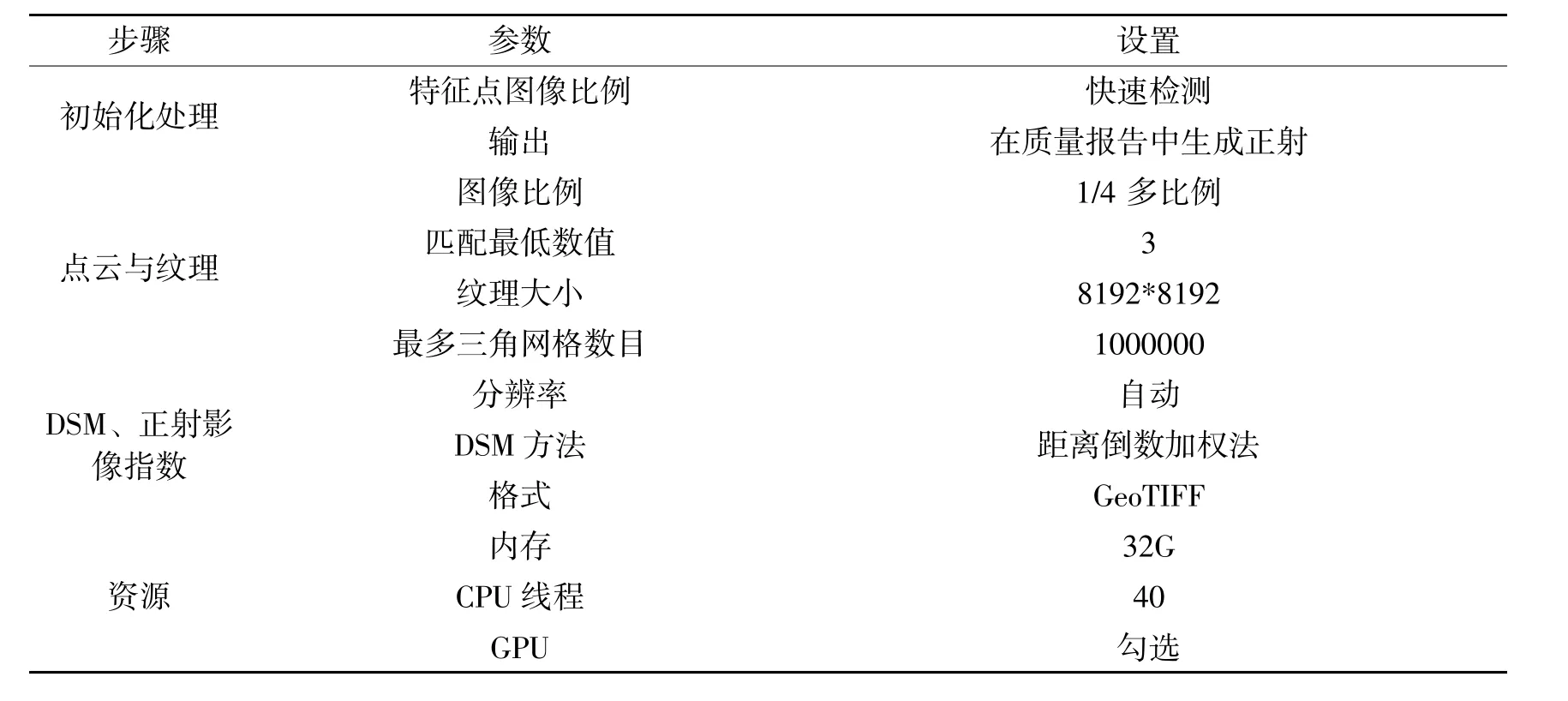
表3 pix4D处理流程与参数
2.2.2 photoscan
Photoscan影像处理流程为对齐照片—建立密集点云—生成网格—生成纹理—Build orthomosaic。建立模块导入影像数据,对齐照片中设置精度、成对预选、连接点限制选项,建立密集点云质量设置为中等,深度设置轻度,生成网格设置表面类型、面数、启用差值运算,生成纹理设置映射模式、纹理大小、数目等,正射影像输出设置投影类型与混合模式。处理流程与参数设置如表4所示。
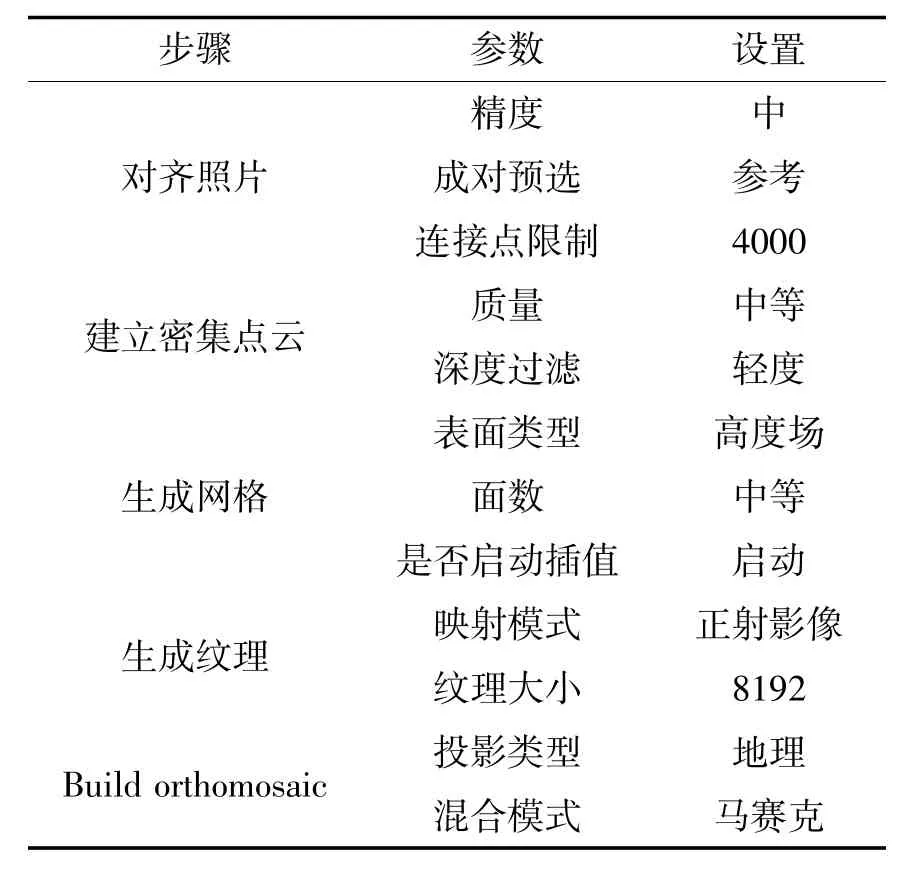
表4 photoscan处理流程与参数设置
2.2.3 smart3D
Smart3D软件生成正射影像顺序不同于其他软件,需要空三运算建立三维模型后重建工程完成正射影像图,其处理流程为新建工程—空三运算—重建模块—产出正射影像图。新建工程设置工程、照片检查,空三运算设置配准与定位,重建模块设置区域块分割、精度、孔洞填充,产出设置影像格式。处理流程与参数设置如表5所示。
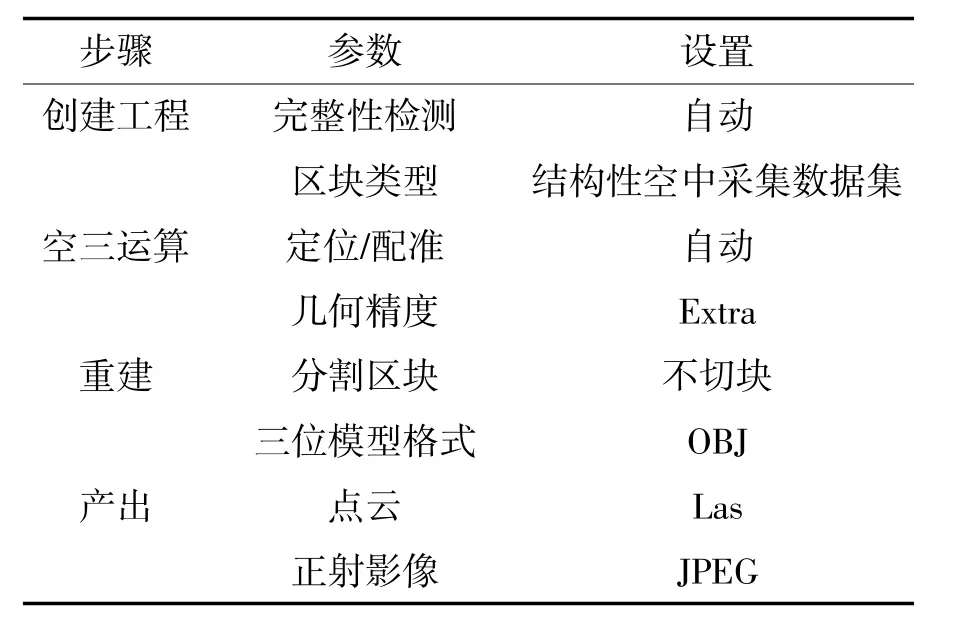
表5 smart3D处理流程与参数设置
3 结果对比
以三款软件质量精度报告为准,从中提取重投影误差(Reprojection Error)、平均地面分辨率(GSD)、耗时(Time for orthomosaic generation)、建模精度、智能化程度五项指标对结果进行对比分析,各项参数对比参照表6(smart3D未作集群运算处理)。

表6三种软件参数对比
实验结果表明pix4D重投影误差最小,精度最高,耗时最短,photoscan智能化程度最高,上手容易,精度误差高,smart3D建模精度最高,精度、平均地面分辨率数值一般,耗时最长。正射影像局部对比中,pix4D屋顶存在拉花现象,后期需要编辑器进行修改完善,photoscan房屋存在拉花现象,真实性不足,本身软件不带有后期修复功能,需用第三方软件进行修复。Smart3D自带匀色效果,局部有波浪型畸变,效果一般(图2-4)。
三维建模对比中,实验采用数据为精灵4pro单镜头一个架次倾斜摄影单体建筑,采用智能飞行控制软件DJI Pilot设置飞行参数,控制无人机自动起飞并执行航拍任务,飞机姿态信息设置为飞行高度设置100m、飞行速度控制5m/s,因测试三维建模精度,所以针对单体建筑开展数据采集工作。由图所见,pix4D三维建模存在纹理空洞,整体建模效果一般,smart3D三维效果整体感觉最好,轮廓清晰,纹理细节处理细致,photoscan三维建模效果一般,存在扭曲,个别地方存在严重变形,纹理效果不够精细,需要后期开展修复工作(图5-7)。

图2 pix4D正射局部图Fig.2 Pix4D normal local image
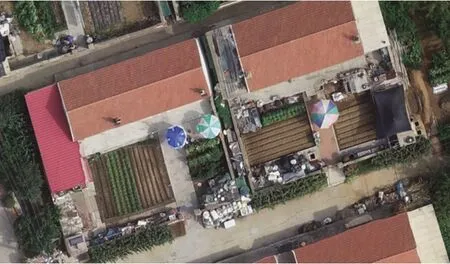
图3 smart3D正射局部图Fig.3 Smart3D normal local image

图4 Photoscan正射局部图Fig.4 Photoscan normal local image

图5 pix4D三维模型局部Fig.5 Pix4D three-dimensional model locality

图6 smart3D三维模型局部Fig.6 Smart3D three-dimensional model locality

图7 photoscan三维模型局部Fig.7 Photoscan three-dimensional model locality
4 总结
本文以辽宁大连城岭村无人机航摄数据为实验数据,通过选取Pix4D、smart3D、photoscan三款无人机影像处理软件,以处理流程、耗时、正射精度、三维建模等指标作为测试指标对三款软件开展对比研究工作,研究结果表明:
(1)小型消费型无人机在飞控系统控制下的测量精度可达厘米级,无人机灵活、快速、精准的测量手段适用于地震应急现场与日常调研等工作。
(2)三款实验软件均具备完整的无人机遥感影像处理功能,但使用效果与使用效率优劣明显,pix4D重投影误差小、地面精度高,耗时短,图像处理过程智能化程度高,劣势在于用户对处理的影响有限,调整结果能力差,地形模型质量生成有限,建模精度不高。Photoscan具备灵活的非线性处理工程,界面简洁,支持外部扩展,成本较低。劣势在于无法自动场景分割,高级功能较为繁琐,软件运行稳定性差。smart3D建模精度高、格式支持丰富,但点冗余度高、资源消耗高、测区范围较大时精度控制的难度较大,适用于相幅偏小的无人机数据。
(3)地震应急现场具有环境复杂、资源有限,人员流动性大,应急产品时效性高等特点,实验表明pix4D占用资源小,软件运行稳定,智能化程度高,便于现场人员上手操作,产出图件耗时最短,精度最高,在地震应急现场的使用效果与使用效率上优于其他软件,建议地震应急现场部署pix4D无人机数据处理平台。
(4)地震应急后方指挥平台具有资源丰富,产品展示度高、时效性高、数据实时分析等特点,实验表明smart3D三维建模精细,搭载专业修模软件便于快速开展房屋、道路、危险源等单体遥感影像评估工作。集群运算方式在使用效率上优于其他软件。建议地震应急后方指挥平台主体围绕smart3D软件,配合pix4D软件部署后方无人机数据处理平台。
猜你喜欢
一重技术(2021年5期)2022-01-18
泉州师范学院学报(2021年6期)2022-01-07
宁波大学学报(人文科学版)(2021年4期)2021-07-07
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
电子制作(2018年11期)2018-08-04
华东师范大学学报(自然科学版)(2018年3期)2018-05-14