
一种红外成像检测系统设计
2020-04-07 10:15
计算机测量与控制 2020年3期
(北京机电工程研究所,北京 100074)
0 引言
红外成像具有抗干扰能力强、成像距离远、分辨率高等优点,红外成像技术检验验证需要专用的红外仪器设备,国内普遍采用的红外成像系统的检验检测手段包括设置红外靶标,借助热像仪等设备对红外目标图像进行校准,然后利用红外目标图像对红外成像系统进行静态测试,这种方法往往局限于试验室内,对红外成像系统进行静态测试和功能性测试,主要缺点是每次对目标图像的设置需要相对专业人员完成,保障要求高,专业性强。
本文提出一种红外成像系统检测系统的设计,通过分析被测对象的需求,针对性的设计了红外目标图像,通过红外光学镜组的设计满足被测红外成像系统不同视场、不同景深的测试需求,检测系统中设计了温度自动监测和控制装置,用于完成红外目标图像和背景温度设置,检测系统属于自动控制检测系统,能够自动设置温度、自动根据被测系统的需要变换目标图像,从而完成红外成像系统的自动化检测。
1 检测原理
被测红外成像系统属于机电一体的复杂光电设备,主要性能指标包括成像质量、分辨率等,在产品生产和出厂环节需要对其功能性能进行检测以保证产品在各个环节的质量,原检测设备为手动检测,分步检测,效率低,数据一致性差。新一代的检测系统实现了对被测对象主要功能及性能指标检测,检测系统设计了满足被测对象要求的红外目标图像、光学耦合组件、控制组件及机械对接系统,实现了自动化测量、数据分析处理等功能。
检测系统的机械对接系统用于检测系统与被测系统检测自动对接,保证两个系统之间的光路耦合及匹配,同时用于靶标红外目标图像和灰度目标图像之间的切换以及目标运动范围的控制与保护。
检测系统的红外目标图像用于检测被测对象的成像功能、分辨率和成像器件的维护,红外目标图像通过红外光学耦合组件后能够使被测对象观察到清晰、亮度均匀、高成像质量的红外景象图像,红外目标图像通过光学耦合系统处理后完成短距离条件下对远距离的红外目标图像的模拟,满足被测对象对不同景深目标的成像需求;背景均匀的灰度目标图像用于对被测系统CCD成像坏元情况进行检查,通过灰度图成像分析检测被测对象成像元件的质量;检测系统可以对设计的红外目标图像进行移动,通过移动的红外目标图像,检测被测对象的成像视场角及对图像的识别追踪能力,检测系统还可以控制红外目标图像及背景的温度,用以检测被测对象的温度分辨率和适应范围。
检测系统的控制组件通过与被测对象交互可以获得被测对象的成像参数,根据相关参数的比较判断被测对象成像质量及成像元件的坏元情况,温度控制部分在一定精度条件下控制红外目标及背景的温度,实现被测系统红外目标成像的温度要求,完成对被测系统温度适应性及分辨率的检测。控制系统运动控制部分按一定精度控制运动机构运动,保证机械系统的对接和红外目标图像的运动。
光学耦合组件完成红外光路的变换,通过光学光路及焦距的设置将红外目标图像精确投放到被测对象的视场并模拟出被检测系统需要的景深。
2 检测系统设计
2.1 系统组成

图1 检测系统组成
结构系统包括对接、平移、支撑、运动等机构,对接结构可以保证检测系统与被测系统快速对接,保证检测设备光路部分与被测设备的镜头对准,使两部分光路出入耦合,保证被测系统的红外探测器通过镜头可探测到检测系统产生的红外目标图像。运动机构用于红外目标图像的二维平面运动,在运动控制组件的控制下能够使红外目标图像在二维平面内进行运动。
红外光学成像系统包括红外目标图像产生装置、红外照明模块和红外光学耦合组件。红外照明模块提供红外目标图像的照明及背景温度的控制,配合红外目标图像产生装置生成设定的红外目标图像,红外光学耦合组件将红外目标图像按照被测系统探测器的要求调整红外目标图像的光路及焦距,使其与被检测系统的探测器镜头光路耦合,保证红外成像的视距和范围。
自动控制系统包括温度控制装置、运动控制装置和系统控制装置,温度控制装置负责设定和控制红外目标图像与背景的温度,保证被测系统探测器能够清晰成像,并完成探测器成像温度范围检测。运动控制系统负责图像的运动及不同目标图像间的切换,为被测系统探测器提供不同的目标图像和运动图像,检测被测系统探测器CCD的性能和系统的动态成像功能。系统控制装置负责检测系统与被测系统及上位控制计算机的通信,接收上位机控制命令、反馈执行状态和结果,提供用户接口控制,对获取的数据进行分析处理等;根据控制需要发送控制指令到温度控制装置和运动控制装置并接收反馈执行信息,完成温度控制和运动控制。
2.2 红外光学成像系统设计
红外光学系统是检测系统的关键组成部分,由红外光学耦合系统、红外目标图像产生装置、红外照明模块组成。红外光学成像系统的主要功能性能参数如下:
可以调节光强变化,能够模拟产生目标图像,红外目标图像能够在靶标图和灰度图之间进行切换,目标图像能够在二维平面内进行运动;
目标图形的工作波段满足被测对象要求,温度分辨率不大于0.2℃,图像最大相对畸变不大于2%;视场角不小于8°,目标运动范围不大于15°,速度精度不大于0.01°/s,响应时间不大于20 ms。
红外红外光学成像系统设计时受以下因素约束:
试验地位于河南林业职业学院东林场(34.68°N、112.50°E),海拔132.10 m。属暖温带地带,全年四季分明,热量、降水量随时间分布具有显著的季节性特点,年均气温14.5 ℃,年均降水量603 mm,全年日照时间2141.7 h,年无霜期217 d,试验地地势平坦,土壤为褐土,pH值7~8。
1)满足被测对象较大视场口径要求;
2)红外图像高像质,小畸变;
3)消除红外光学系统成像时温度影响。
根据上述要求和参数进行光学系统设计,结构组成如图2所示。
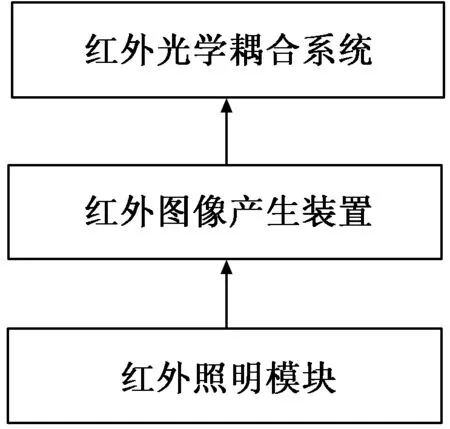
图2 红外光学成像系统示意图
红外照明模块负责红外图像及背景的红外照明;红外图像产生装置用于生成功能检测图像、灰度图象及分辨率检测图像,分别用于不同的检测环节;耦合系统对红外目标图像光路进行控制以保证被测系统探测器成像的视距和范围。经光学结构优化设计,红外光学耦合系统最终由数片透镜组成。检测系统的红外光学成像系统形成了一个完整的红外光学投射系统,红外光学投射系统的设计依据光学特征进行设计并根据工程化需要对光学系统中影响成像质量的因素进行了针对性的设计处理,保证了红外目标图像稳定度、清晰度和质量。
检测系统的成像系统设计可由光学传递函数H(v)=m(v)exp[iφ(v)]表征。
通过系统后像的光强分布为1+m(v)cos[2πvx+φ(v)],其中m(v)为调制传递函数(MTF),表征系统对于空间频率为V的余弦信号俄调制度的衰减,是光学传递函数的模。φ(v)为相位传递函数,表示余弦光栅亮条纹的位置向暗条纹位置的相对移动。本检测系统属于有限孔径的光学成像系统,空间频率过高的余弦光栅的衍射光离轴角过大,不能进入系统,因此存在截止频率Vc=1/λF=2N·A/λ,F为成像系统的F数(焦距/孔径),λ为红外光波长,N·A为数值孔径。评价系统成像质量同时考察子午MTF和弧矢MTF,为了快速判别成像质量,本系统使用空间频率V0=Vc/2的调制传递函数m(v0)与阈值额比较来作为镜头像质是否合格的判据。通过计算及仿真,模拟20℃时检测系统光学系统的MTF曲线如图3所示。

图3 20℃时MTF曲线
20℃时的场曲和畸变曲线如图4所示。

图4 20℃时的场曲和畸变曲线
经过上述仿真及计算可知,整个光学系统输出的图像质量在轴外视场对于水平方向余弦光栅和垂直方向光栅的MTF并不相同,系统的成像质量还需要继续改进,经过分析及试验,证明光学系统成像质量主要受到系统内部各成像部件温度的影响,温度不一致为主要干扰因素,因此在设计中先采用几个空间频率V0的调制传递函数m(V0)与阈值的比较来作为镜头像质设计的依据,在调试完成后选取一个空间频率V0作为特征频率,取V0=Vc/2。为了得到点光的像强度分布,系统采用了光的衍射理论研究点光源至透镜、至像平面的整个的光波的传播过程,得出像平面上强度分布的点扩展函数,利用点扩展函数对光学系统的分辨率进行判断。引入正弦光栅经光学系统成像后,比原物相比反衬度降低,最高强度降低,最低轻度升高,设备空间频率V的函数T(V)满足0≤T(V)≤1条件,改变V可测得T(V)的变化曲线。系统设计中根据上述依据和试验对红外光学耦合系统的热分布及影响进行了无热化设计并对设计进行了仿真分析。
检测系统工作温度为-20~+60 ℃,红外光学成像质量受温度变化影响较大,检测系统利用材料随温度变化的形变和红外材料随温度变化发生的折射率变化进行光学被动补偿,使检测系统在环境温度变化时,成像质量保持不变。
经过无热化设计后,-20℃时的MTF曲线见图5,60℃时的MTF曲线见图6。通过仿真分析及试验评价,红外光学成像系统成像质量满足设计要求。

图5 -20℃时的MTF曲线

图6 60℃时的MTF曲线
2.3 自动控制系统设计
控制系统由运动控制装置、温度控制装置和系统控制器组成。
控制系统工作过程:系统控制器接收上位机发送的控制指令,解析指令代码并按照固化在FLASHROM内的程序通过系统控制器的接口输出运动控制指令或温度控制指令,如果收到的指令为运动指令则系统控制器IO接口输出脉冲信号,信号经放大后带动方位、俯仰步进电机执行相应的运动指令。如果为温度控制指令,系统控制器将温度控制指令发送到温度控制器并接收其返回的执行状态,温度控制装置采用高精度温控仪、继电器、感温探头组成温度及热辐射闭环控制系统,保证红外目标图像波长能够在一定波段范围内。系统控制器还可以利用闭环控制方式校验测试系统的传递函数、运动精度等参数等。控制系统同时将控制信息及参数反馈到上位机,用户通过上位机人机界面了解测试设备的工作情况,或利用参数进行控制计算。控制系统结构及流程简图见图7所示。

图7 检测系统控制流程框图
2.3.1 运动控制装置设计
运动控制装置主控核心部件采用可编程逻辑控制器(PLC),可编程逻辑控制器内部有两个脉冲输出通道,通过上位机输送控制代码经系统控制器转换成符合可编程逻辑控制器通信协议指令代码,通过PLC两个高速脉冲输出端口分别给两台控制驱动器提供相应的运动参数,驱动器进行处理并最终驱动两台步进微步电机,微步电机驱动运动结构部件,使依托在运动框架的红外图像生成装置沿“X”轴及“Y”轴两自由度方向上按上位机发送的指令代码做出相应的运动,运动控制原理框图如图8所示。运动控制装置可以设置目标图像的运动方式,可以进行匀速、变速、点位、余弦等运动方式,满足对被测对象测试需要。

图8 运动控制原理框图
2.3.2 温度控制装置设计
根据温度控制系统抽象出温度控制部件的数学模型,并设计了温度控制装置的温度控制数学模型,温度控制方案如图9所示。控制系统根据环境温度及控制对象反馈温度计算作为控制执行机构信号的输入,根据执行机构信号的控制规律得出信号特征,通过温度控制规律及设定的温度目标计算得出温度调节装置的输入信息,温控调节装置按设定的控制及补偿规律完成对照明系统的照明温度控制。

图9 温度控制方案框图
温度控制装置的控制核心为数字式温度控制器,具有PID数字调节功能,温度控制器接收系统控制器发送的温度控制指令并将指令转化为脉宽可调的脉冲信号,该脉冲信号驱动温控继电器工作,同时接收高精度温度传感器反馈的温度信号,通过温度调节闭环控制系统使被加温热辐射单元温度保持在设定温度。温度控制过程如下:设定温控装置的内部参数(温度上下限、PID参数设定、输出方式设定等),使温控装置的输出控制端口能够按照设定的程序输出脉动的+5 V直流电压,使其驱动温控继电器,这时高精度温度传感探头监控红外照明系统的温度同时反馈温度信号,通过温控装置内部电路与设定温度参数的数字量进行比较,进一步确定温控继电器输出电压的频率从而形成温度闭环控制。温控装置控制框图如图10所示。

图10 温度控制原理框图
3 实现结果与分析
该红外检测装置在某红外成像系统生产及出厂检测中得到应用,通过上位机配置本检测系统的测量参数,并控制检测系统工作流程,实现了对被测红外成像系统的自动检测,包括对红外图像的检测、识别和跟踪功能,并能够获得被测系统成像范围、像素分辨率、温度分辨率、成像景深、成像CCD坏元数等性能的检测。本检测系统能够提供的一种模拟图像如图11所示。

图11 检测系统模拟的红外成像图
4 结束语
本设计服务于红外成像系统的功能和性能检测,检测系统设计了红外光学系统与被测红外成像系统匹配,能够检测被测系统成像的性能和功能,为了适应动态成像需求设计了目标图像的运动控制电路,为适应检测系统的自动化,设计了温度控制系统,测量控制系统,通过工程应用,证明了本系统设计的有效性和正确性,并进一步完善了该系统对工业现场的适应性。
猜你喜欢
环球时报(2022-05-23)2022-05-23
中国典型病例大全(2022年7期)2022-04-22
航天返回与遥感(2022年1期)2022-03-09
金桥(2021年4期)2021-05-21
小学阅读指南·低年级版(2020年10期)2020-10-12
华人时刊(2020年23期)2020-04-13
少儿科技(2019年5期)2019-09-10
青年时代(2017年4期)2017-03-10
建筑建材装饰(2016年13期)2017-01-04
建筑建材装饰(2016年9期)2016-12-29
