
铁路路基沉降实时监测系统的设计与研发★
2020-04-15 03:23耿宽宽
机械管理开发 2020年11期
丁 勇,耿宽宽
(山西省信息产业技术研究院有限公司,山西 太原 030012)
引言
随着我国铁路的快速发展,铁路的运营安全问题便成为重中之重,其中能够实时监测铁路的路基沉降是保证铁路安全的重要先决条件。铁路线路不可避免地会经过一些环境恶劣地区,由于雨水、泥石流等环境因素的影响导致路基下沉,最终导致行车事故。同时由于地质灾害多发生在荒无人烟处,缺乏供电支持,常规人工检测方法效率低下,且无法随时了解现场的动态监测结果,很难达到及时预警的目的[1-3]。因此,本文主要研究一种新型路基沉降监测系统,该系统在采用北斗卫星对路基沉降进行沉降位移监测的基础上,结合惯性技术进行路基沉降的位移监测,对于提高铁路系统的安全预警、促进沉降观测工作的研究与发展都具有十分重要的意义。
1 铁路路基沉降监测系统结构
铁路路基沉降实时监测系统由铁路沉降监测设备和云端监控中心组成。其中监测设备根据布置位置主要分为基准站和监测站两类。基准站被布置在环境空旷、地质稳定的地方,监测站主要被放置在已经发生沉降或者可能发生沉降的区域内。如图1 所示,铁路沉降监测设备主要接收北斗定位数据,同时也接受基准站发送过来的定位数据,经过数据处理后通过GPRS 无线网络无线传输装置远程发送到云端监测中心。此外,整个系统可以在铁路沿线安装多个铁路沉降监测装置,该系统可以采用一对多的形式,多个铁路沉降监测设备可以同时将沉降位移信息发送到云端监控中心,实现多点监测预警的功能。
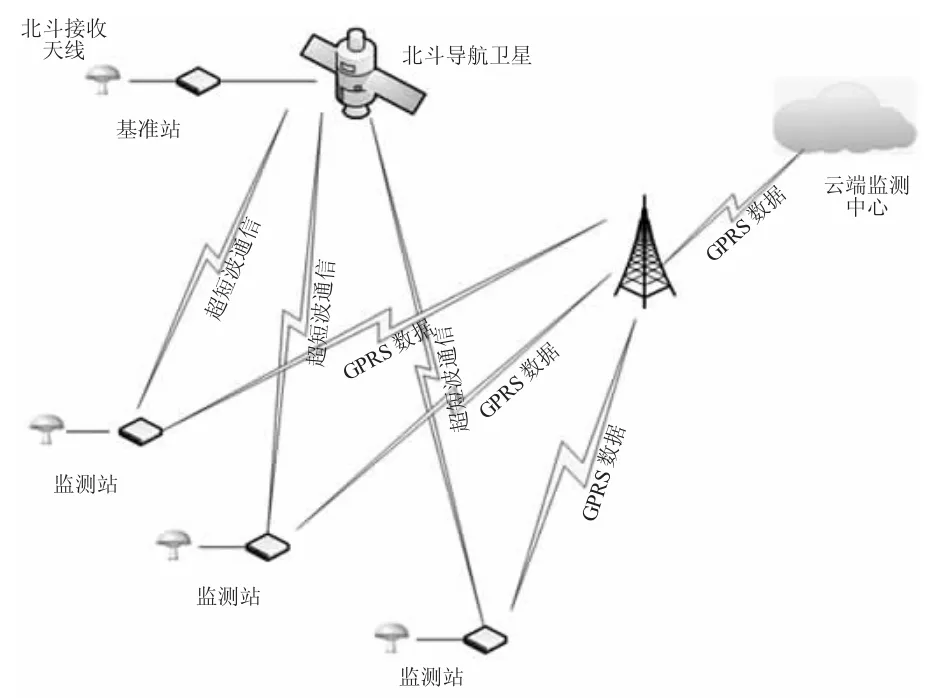
图1 铁路路基沉降监测系统网络框图
1.1 铁路路基沉降监测设备
铁路路基沉降监测设备主要由核心控制单元、卫星接收天线以及电源模块三部分构成,其中核心功能系统主要由数据处理模块、无线通信模块及北斗定位模块构成,如图2 所示。
1.1.1 核心功能模块
核心功能模块主要包括数据采集处理模块、北斗定位模块以及无线通讯模块。该核心模块被放置于室外露天高防护等级箱内。防护箱具有散热、防冻特点,保证内部单元模块能在任何天气条件下正常工作。

图2 硬件结构框图
数据采集模块主要完成铁路沿线各监测点的监测数据的处理及存储功能,在数据经处理后,连接数据库,记录所需要保留的各项数据信息;无线通信模块用于将本地接收到的沉降监测数据通过GPRS 无线网卡发送到云端监测中心,只要有GPRS 通讯信号覆盖和GPRS 的终端设备,就可将数据按规定的时间传输至云端;数据处理模块主要负责数据分析处理。
1.1.2 电源模块
电源模块负责为整个监测站提供稳定的电源。因其主要被布置在环境条件较差的区域,所以电源模块主要采用单晶硅太阳能板进行供电。单晶硅太阳能板具有光电转换率高、坚固耐用、寿命长等特点。
1.2 云端监测中心
云端监测中心为B/S 架构设计,通过网页即可查询监测情况。软件采用多层设计,软件中监测变化数据将通过图表、曲线或者柱状图的形式被显示出来;软件具有断面分析、位移矢量分析、历史数据查询、分级用户管理和分级报警等功能;软件可显示监测结构图和传感器分布图等,软件存储采用Oracle数据库。安全预警模块的功能主要是,当出现沉降量超过预定值后,将通过短信报警、网络报警实现多种方式同时报警。
2 技术创新
本文采用北斗导航技术和惯性技术相结合的方式对沉降进行定位。该方法不是直接采用北斗导航系统获取的位置信息进行数据处理,而是通过惯性技术对数据进行二次分析处理,通过卡尔曼滤波数据模型对其进行反馈校正得到最终沉降量。
2.1 卡尔曼滤波组合导航数学模型
卡尔曼滤波是将关于系统误差的统计性质与关于系统动态的知识集合起来的统计技术。本文主要采用卡尔曼滤波作为导航信息算法,选择间接法反馈校正模式设计组合系统,结合惯性技术推导出卡尔曼滤波组合导航数学模型,如图3 所示。
2.2 基于模糊置信度的静态相对定位技术

图3 组合导航模型
本文提出的结合模糊理论的计算沉降位移置信度方法的设计思路是:首先,将一个较长时段T 分成n 个子时段,然后通过北斗导航卫星“静态相对定位技术”依次计算出各个子时段的沉降位移量N1,N2,…,Nn;第二,根据各个子时段的卫星数据质量,确定各个定位结果的置信度M(1),M(2),M(3),…,M(n);最后,利用数据模型算出整个时段的沉降位移N。该方法的原理如图4 所示。

图4 基与模糊置信度的静态相对定位技术原理图
3 系统的实际应用
该路基沉降监测系统(共安装1 个基准站、3 个流动站)于2020 年已被安装到铁路沿线(见图5)并开始进行实地测量,运行期间没有出现断电情况,所有数据都能被正常传送到数据库,运行稳定。该系统界面友好,操作简单,各个监测点接收机实时接收北斗卫星信号,并将经过处理后的数据经过GPRS 无线网络被实时发送到云端监测中心,同时云端检测中心根据事先设定的预警值进行报警。路基沉降位移监测的误差,水平方向为±2 mm、高程方向为±5 mm,并且可以实现双基站或多基站处理功能。

图5 现场安装图
4 结论
本文设计研发的的铁路路基沉降实时监测系统可以及时、准确地掌握铁路沿线隐患区域的安全状况,帮助铁路工作人员快速定位沉降地点并为其提供安全预警决策,降低因沉降灾害带来的生命威胁以及财产损失,可以有效地解决传统方法存在的工作量大、距离受限以及自动化程度低等不足,具有高精度、全天候以及自动化程度高等特点,相对于同类产品具有突出的技术特点和显著进步,极大地促进了沉降观测工作的研究与发展,有重要的实际意义和广阔的应用前景。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
小哥白尼(神奇星球)(2022年3期)2022-06-06
华人时刊(2022年5期)2022-06-05
现代装饰(2020年5期)2020-05-30
当代陕西(2019年18期)2019-10-17
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09
小学生优秀作文(趣味阅读)(2017年3期)2017-02-11
太空探索(2016年12期)2016-07-18
