无人机交通管理中路径规划策略研究综述*
2020-04-18 02:23黄静洋付小蓉潘卫军
科技与创新 2020年6期
黄静洋,付小蓉,潘卫军
无人机交通管理中路径规划策略研究综述*
黄静洋1,付小蓉2,潘卫军1
(1.中国民用航空飞行学院 空中交通管理学院,四川 德阳 618307;2.中国民用航空飞行学院洛阳空管站,河南 洛阳 471001)
如今无人机被广泛使用,在无人机空中交通管理中,路径规划是极其重要的一环。对无人机路径规划的自动控制策略的国内外研究现状进行了综述,简单介绍了无人机的控制系统和目前认可度较高的无人机交通管理系统,分别对单机飞行的路径预规划策略、多机协同飞行的任务规划及协同策略和无人机飞行中动态避障策略三个方面现有研究进行整合分析。三方面的综述基本涵盖了国内外无人机相关路径规划的控制策略,并比较了常用策略的适用场景。
无人机;路径规划;协同控制;避障策略
近年来,由于无人机成本较低,人员伤亡风险低,机动性好,在民用和军事上都有广泛用途,人们研究无人机的热度持续上涨[1]。无人机可代替人类进行一些特殊任务,比如2020年初新型冠状病毒疫情期间,一些城镇使用无人机进行派件和发放物资。然而由于目前无人机的监管体系并不完善,2016—2018年出现了多次无人机“黑飞”,产生了恶劣的影响,这给空中交通管理体系敲响了警钟[2]。要适应严格的管控体系,无人机交通管理系统中的相关技术十分重 要[3-4]。因此,针对小型无人机的空中交通管理系统的探讨日益激烈,国内外多次召开相关讨论会议,众多学者针对无人机的管控体系和关键技术进行了研究。较欧美发达国家,中国在无人机领域起步较晚,近年来在规章制度和技术方面进步很大,但仍有不足。能够自主执行任务,且满足交通管理要求,是无人机今后发展的必然趋势,路径规划是无人机空中交通管理系统中重要组成部分。能够采用合适的路径规划方法,合理地避障和执行任务,提高生存能力,是无人机发展面临的重要挑战之一。本文对国内外无人机交通管理中路径规划策略进行总结梳理,旨在为后续广大学者在此方面的研究及相关部门对管控体系的发展提供参考和借鉴。
1 无人机控制系统及交通管理系统
1.1 无人机控制系统
无人机控制系统通常可以称为飞行控制系统,也是无人机的核心系统,相当于无人机的“大脑”。该系统的作用主要是控制机体的起飞、着陆、姿态和方向,使无人机按照指定的航迹飞行,完成分配的任务,且在此过程中进行避障。现在民用无人机的飞行控制系统一般是按照遥控指令进行控制,如果无指令或无法收到指令,则按照既定方案执行。军用无人机的执行任务更为复杂,对无人机的控制要求也更高,除单机执行任务外,还需要能够多机协同完成任务。
目前较常见的无人机为旋翼机,旋翼机与固定翼飞机飞行的空气动力学原理一样,都是利用不同流速空气静压不同从而控制飞机升空飞行[5]。与固定翼飞机不同的是,旋翼机的机翼速度远远大于机身速度,这使得旋翼机相比较于固定翼飞机有更大的负重能力和更好的灵活性,能够处理一些特殊的工作任务。本文以旋翼无人机为主要研究对象,旋翼无人机系统结构如图1所示。
如图1所示,旋翼无人机系统包括数据采集模块、数据处理模块、控制器、执行机构、遥控模块和无人机机体(包括任务装置设备)。数据采集模块通过几种器件可以采集到无人机的位置、高度、姿态和加速度,数据处理模块接收到这些数据信息以及遥控器接收到的数据后对其进行处理,再将处理后的信息传给控制器。控制器根据接收到的信息和设计好的控制算法,将控制指令发送给执行机构,包括转换器和无刷电机,从而控制无人机的运动。
无人机控制器系统如图2所示,包括前端采集模块、中央处理模块、控制执行模块和被控对象。系统的前端采集模块用于采集周围环境信息、自身姿态和位置信息,这些信息发送给中央处理模块,中央处理模块将信息处理后得到控制信息,再发送给控制执行模块。此控制信息经控制执行模块转化为运动动作,控制被控对象的运动。

图2 无人机控制系统框图
1.2 无人机交通管理系统
中国民航已经有较为完善的体系和较为显著的发展,但目前中国尚无一个完善的无人机交通管理系统,已有不少业内人士针对无人机的交通管理系统进行了研究和展望,这些研究各有想法,分别从不同方面进行了分析。无人机的交通管理系统应该包含飞行计划申请和审批系统、数据中心、管制系统和监视系统,文献[6]提出一种系统构架,如图3所示。系统基于北斗RDSS和ADS-B的监视信息,将无人机的飞行计划数据和监视数据传送至数据中心,数据中心对这些数据进行融合处理,管制系统根据无人机的数据进行管制,同时也将管制信息传送回数据中心。管制系统内的管制员和管制中心通过管制员工作站进行数据交互,如果遇到紧急情况,通过网络将应急信息发送至无人机的管控平台。
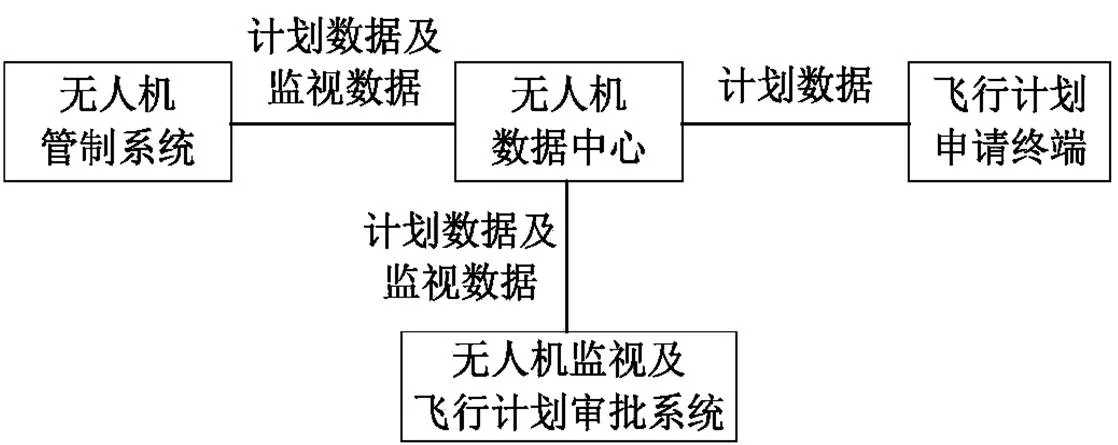
图3 无人机交通管理系统框图
无人机的管控系统要能够实现四种功能:无人机的注册审批、数据接收与发送、飞行任务监管与违规报警、任务统筹规划[7]。也有研究人员从技术层面分析了无人机的交通管理系统,以自主感知避让、地理围栏、统一的飞行规则等技术构成安全技术层[3],可以将无人机按飞行高度、无人机大小等进行分类[8],再通过这些技术在已划定好的无人机禁飞区、限制区、开放区等对无人机进行管控。
2 单机路径预规划策略
在无人机的管控系统中,首先需要对无人机的飞行进行路径规划,包括预规划和实时动态规划,如果只通过无人机飞行员操控无人机的飞行航迹,那么将不能实施统一的管制调配,需要管控系统对其进行规划,或需要其所有人进行规划后上报管控系统进行申请。预规划通常是在无人机所有人提交飞行计划申请时对其计划的飞行任务进行路径规划。有人机在空域内有规定的航路航线,除紧急情况外必须按航路航线和规定的飞行高度层飞行,无人机也需要按照既定的航路航线和高度飞行。在预规划中需要考虑转弯点、能耗和已知固定障碍物,通过一系列计算使得路径最优。如果无人机在飞行过程中遇到紧急情况,或飞行任务发生变化、环境信息发生变化等,需要改变既定的航路,需要管控系统对其进行实时改航规划,这种航迹规划通常以避障为主,所以本节主要分析路径的预规划。
2.1 基于遗传算法的路径规划
在无人机路径的预规划中,应该充分考虑已知地形和障碍物的信息,首先对地形进行建模,对于数字地图的模拟函数有很多,在本文中不做赘述。在地形建模后,应该根据地形数据,形成一系列航迹点,进而对无人机的路径进行预规划。在路径规划方面,遗传算法是一种较为主流的算法,已经有学者陆续使用该算法或基于该算法的改进算法对无人机进行了路径规划[9-12]。在该算法及其改进算法中,首先对航路进行编码,文献[10]和[11]都采用一维编码表示路径,文献[9]采用二维编码表示路径。虽然一维编码在迭代计算上较为简单,但将无人机运行的三维空间简化为二维,对于反映无人机的运动不够精确,而二维编码能更有效精确地反映无人机的运动过程。对于任务较为单一、路径较短、环境简单的飞行任务,可以选择较为简便的一维编码,对于任务复杂、任务要求高、路径较长、所经路径环境多变的飞行,可以选择精确度较高的二维编码。
在使用遗传算法进行问题的求解时,除了选择合适的编码方式,还要选择合适的终止条件和适应度函数,以及合理的复制、交叉、变异的遗传操作[13]。通常情况下,无人机的路径预规划既要达到最快、能耗最小抵达任务点的目标,又要能够在途中规避威胁和已知障碍物。所以将这两点考虑在内的目标函数所产生的适应度函数是个体选择的标准,采用遗传算法的大多数规划策略都是以此为基础的。
在遗传求解中,文献[9]对选择,即复制的过程进行了改进,先对所有个体的适应度进行排序,只复制适应度高的个体。同时在变异的过程中加入变异算子,改变相邻两个航路点的横纵坐标的距离较大时,细化其变化量的表达式。这样的改进虽然简单,但可以加强无人机运行的稳定性,并加速算法的收敛过程以尽快达到最优解。
文献[10]的算法改进核心是分别对多个种群使用不同的控制参数,在每一次迭代后进行移民和人工选择,直到得到精华种群中的最优个体,改进遗传算法如图4所示。这种用种群中最优个体代替临近种群中最劣个体的操作,可以得到一个精华种群,而精华种群是遗传的终止条件,同时也不进行复制、交叉、变异的遗传操作。经仿真验证后得到的结果证明该方法有助于提升稳定性,但需要更长的时间运算。
另外还有研究将传统遗传算法与其他算法相结合,以改善传统遗传算法的劣势[12]。例如将遗传算法与模式搜索法相结合,先使用遗传算法全局搜索,达到终止条件后,令模式搜索法的起始基点等于遗传算法所得的最优解,初始步长等于最优解和最差解的差值,进而使用模式搜索法进行局部搜索。这种方法所得到的最优路径精度更高,更稳定,适合在无人机禁飞区、限制区和威胁区较多的地区或地形较复杂多变的地区使用。
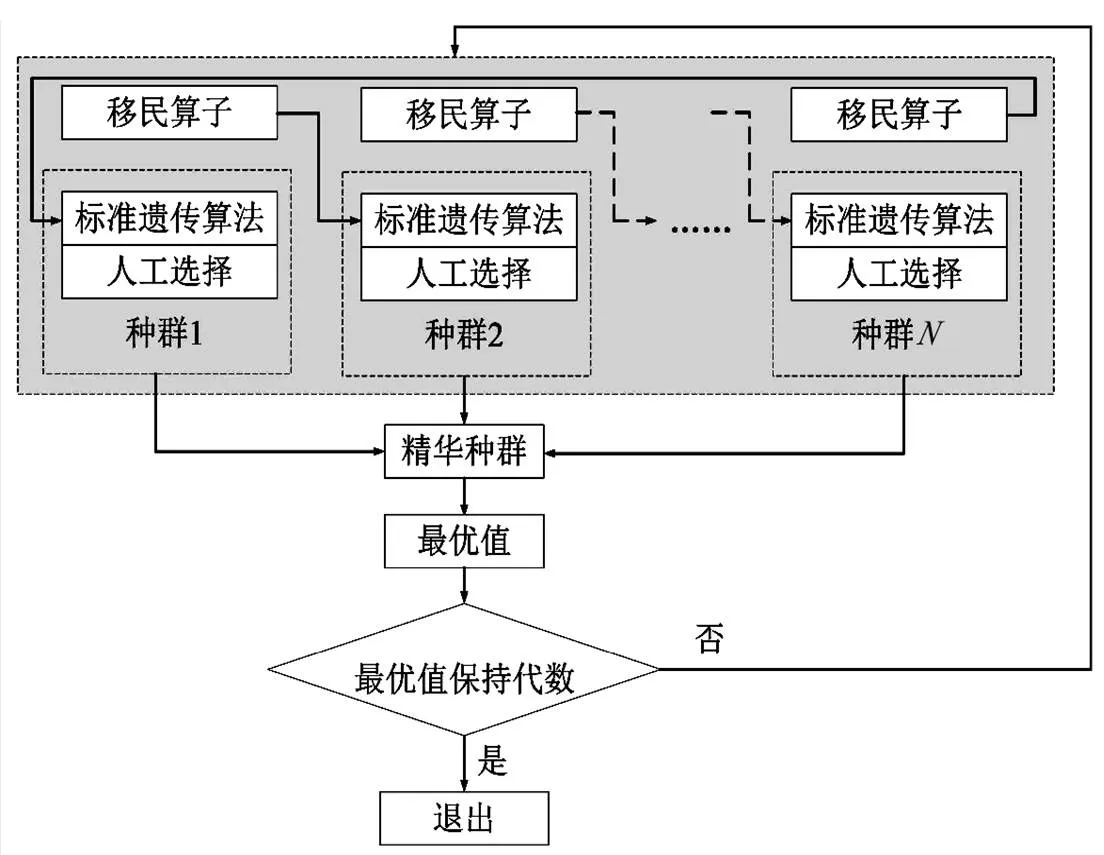
图4 改进遗传算法
通过以上的文献和分析可以知道,由于传统的遗传算法寻优精度较低,稳定性不高,但通用性强,全局搜索能力强,通过对遗传算法进行改进,或结合其他算法共同使用,可以改善遗传算法的缺点,提高适用性。
2.2 路径规划其他策略
除了遗传算法这种常见的无人机路径规划策略外,还有一些其他使用较多的算法,比如人工势场法、蚁群算法、粒子群算法、VORONOI图法等,这些算法难易程度不同,也各有优缺点,适用范围也不尽相同。
人工势场法是将无人机的运动空间看作虚拟势场,而将其中的运动看作在势场中引力和斥力作用下的结果,即无人机飞行的目标点对其产生引力,障碍物或威胁区对其产生斥力,无人机就在这样的合力下向目标点运动。根据确定的目标点和已知的障碍物或威胁区位置,建立引力势场函数和斥力势场函数。这种人工势场法比较简单,计算时间也比较短,但是容易陷入局部最优而收敛不到目标点,所以也有不少研究改进了人工势场法,比如将力矢量改为势场强度、在势场函数中添加系数项[14]、在障碍物附近设置旋转矢量[15]、在设置预规划路径的基础上计算多条候选路径、建立代价函数选择最优的候选路径[16-17]。
蚁群算法也是如今比较常见的人工智能算法,有人将其应用于无人机的路径规划中。蚁群算法的核心思想是,设置蚂蚁的数量,当蚂蚁从某条路径经过时会留下信息素,路程越近信息素的信号强度越大,被后续蚂蚁选择的可能性越大,相应的,同一路径上经过的蚂蚁越多,信息素就越多,信号强度会不断叠加,又会有更多蚂蚁选择此路径,如此迭代下去最终会形成一条绝大多数蚂蚁都选择的最短路径。此方法需要设置蚂蚁状态转换规则和信息素更新规则,但蚁群算法收敛的速度较慢,计算复杂程度在区域扩大时会大幅增长,容易陷入局部最优,因此也有不少学者对蚁群算法进行改进以改善这些缺点[18-21]。可以改进蚁群算法的初始状态,以其他算法获得的路径作为蚁群算法的初始解,以提高收敛速度,缩短搜寻路径,这样的改进适合于山峰较为密集、区域面积较大的山区;也可以对传统蚁群算法的状态转换规则和信息素更新规则进行调整,在提升整体搜索能力的同时保持较高的收敛速度。
粒子群算法也是一种进化算法,由鸟群捕食衍生而来,最优解相当于鸟群的食物源,各粒子分散搜寻,相互传递消息,通过迭代后集中在最优解,达到收敛。其中的流程是先初始化粒子群中各粒子的位置、速度,建立适应度函数,寻找个体极值,得到全局最优解,据此更新粒子的位置和速度。为防止该算法陷入局部最优,也可以结合其他算法对部分粒子进行其他操作,比如引入差分进化、量子行为等[22-24]。结合其他算法的粒子群路径规划策略,由于不需要遗传算法所用的交叉和变异操作,相对来说比较简单,收敛速度也比较快,适用于三维环境的路径规划。
VORONOI图法主要是根据威胁和障碍物的分布情况建模,形成无人机的航路集合,计算航路代价后,在VORONOI图的基础上利用一些搜索算法,如dijkstra搜索算法,得到初始最优路径,之后采用B样条、三次样条,或序列二次规划等方法得到无人机最终最优路径[25-27]。
3 多机任务规划策略
许多任务不仅需要无人机完成,还需要多架无人机协作自主完成,比如作战任务、市政工作、物流等。多机协同完成任务,与单机任务不同的是,单机只需要完成自身的路径规划即可,但多机协同时,需要考虑到综合最优路径组合和任务分配的最优方式。此时需要构建一个多无人机的网络系统,满足各无人机之间的信息交互、传递、综合处理等要求。
可以使用改进后的单机路径规划的人工势场法、粒子群算法或A*算法等进行多机任务规划[28-31],共同点是要考虑无人机的数量和各无人机完成任务的程度。目前在多机协作中研究较多的是基于Agent的任务分配和规划策略,Agent是一种软硬件系统,具有驻留性、自主性、反应性和能动性,常用在分布式应用系统。文献[32]提出了一种基于多Agent的算法,该算法分为两个阶段:①根据约束条件,使无人机遍历目标点,逐步增加无人机Agent数量,根据终止条件判断是否完成任务,得到初始可行解;②基于多Agent的算法流程,如图5所示。在初始可行解的基础上,第一架无人机是路程时间最短的,第架是返回时间最长的,根据此流程逐步逼近最终的最优解。相较于其他方法,基于Agent的策略可扩展性较强,适用于编队中无人机的数量较多、目标点较多、出发地较多的情况。
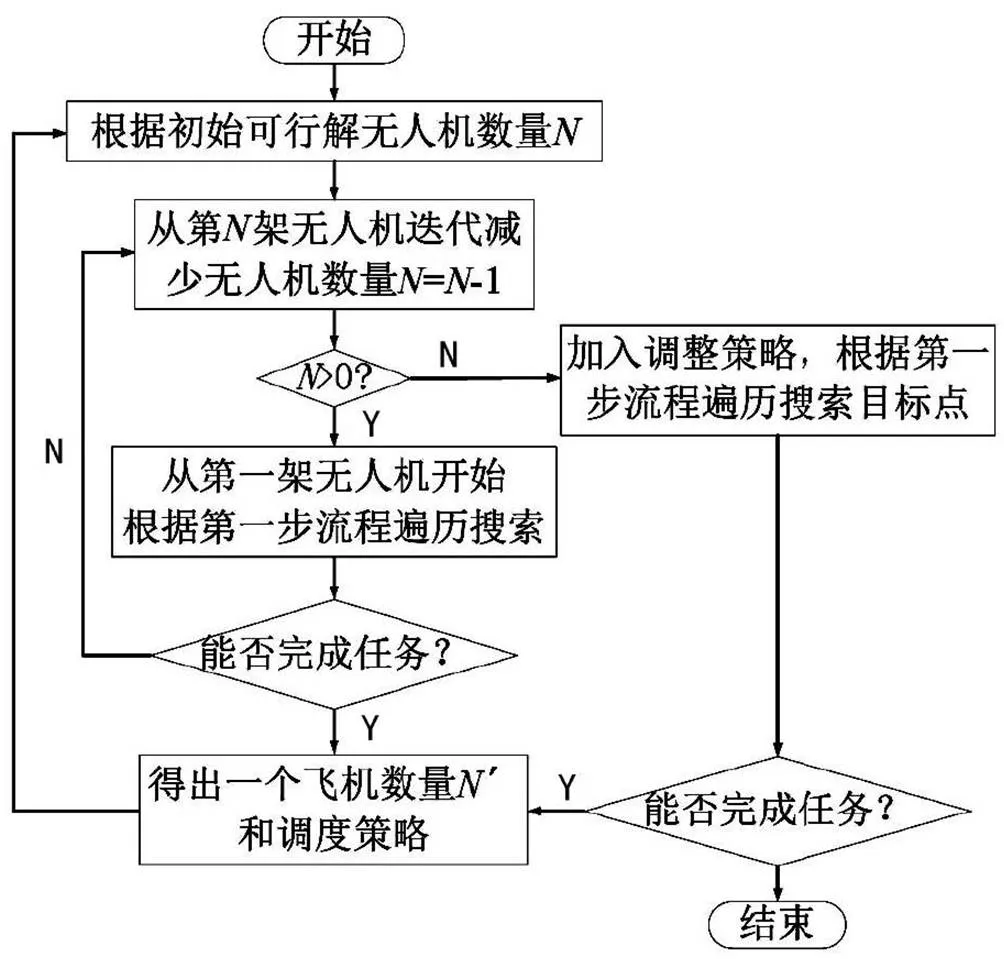
图5 基于多Agent的算法流程
如果执行编队飞行任务的无人机目标点一致,需要控制编队中各无人机间的间隔、相对位置等,可以采用“长机-僚机”法等。这些算法更偏重于编队的整体性和协调性。文献[33]提出了一种分布式控制策略,在三维环境中僚机知道自己与长机的相对位置,而长机不需要知道僚机的相对位置,这种控制策略较为简单,编队中任意一架无人机均可作为长机,但僚机对长机缺少实时反馈。文献[34-35]采用的编队控制方法基于人工势场的改进策略,人工势场法的基本思想在前文已介绍过,这里的改进算法中加入了僚机和长机的虚拟力,长机对僚机产生一定的引力,僚机之间产生一定的斥力,以此保持编队队形,共同避开障碍物,向同一目标点飞行。
基于人工势场的编队控制策略模型如图6所示,以构成三角形的三架无人机为例,此三架无人机均为僚机,在三角形中间增加一架虚拟长机,控制长机所受的阻力进行避障。如果在该算法中加入平滑改进算法和约束条件,可以使编队保持良好的稳定性和鲁棒性。
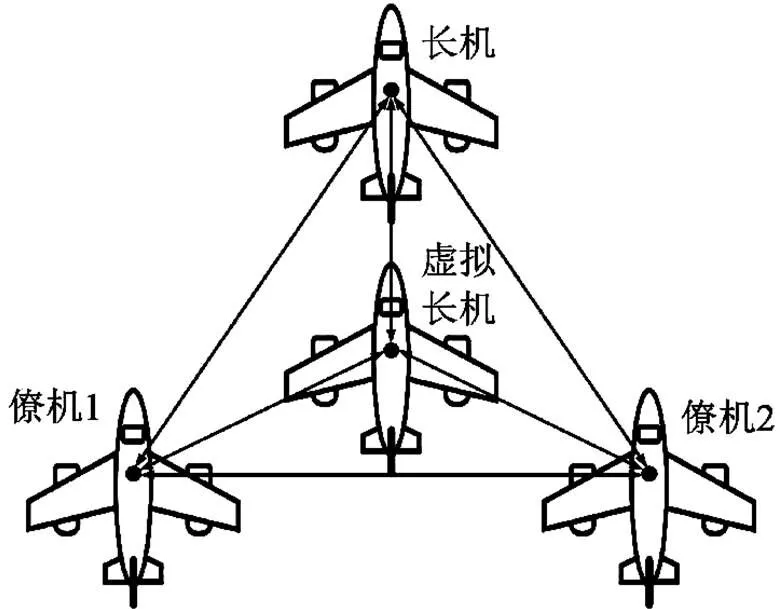
图6 基于人工势场的编队控制策略模型
4 动态避障控制策略
无人机的动态避障也可以称为无人机的感知与避障,是无人机在飞行过程中进行检测和规避障碍物的功能。无人机感知障碍物,可以通过空中交通管制提供的管制服务、飞行情报服务和告警服务实现,也可以通过机载传感器,包括红外传感器、雷达、视觉传感器等实现。
本节主要针对无人机在感知临时障碍物后的避障控制策略进行综述。
在无人机的动态避障中,需要判断障碍物是相对地面静止的还是运动的、与无人机的相对运动速度、距障碍物的距离、威胁等级等,根据这些信息采取合理的避障措施。文献[36]分析了无人机的类型,为不同类型的无人机设置了安全间隔。根据安全间隔可以为无人机设置飞行安全包络和避障区域。当运动障碍物进入到无人机的避障区域后,无人机系统会检测到此障碍物,文献[37]提出了在规避障碍物后重新回到起始航迹飞往目标点的简单算法。文献[38]采用的是前文所述的人工势场法,在障碍物进入雷达检测到的威胁距离时控制无人机进行减速,之后双目视觉可以检测到障碍物,无人机采取避障措施,采用人工势场法得到新目标点,无人机飞往新目标点以规避障碍物,规避后再回到原航点或原航线。文献[38]在使用单目视觉采集的图像进行信息处理后,使用动态变换概率策略对花授粉算法进行改进,得到新目标点最优解。
在这些动态避障系统中,双目视觉检测障碍物的距离较短,雷达等可以远距离检测障碍物,由空中交通管制服务提供信息较为全面,需要加强地空通信功能。在感知障碍物后,可以采取路径规划中时所采用的人工势场法及其改进算法、粒子群法及其改进算法、蚁群算法及其改进算法等智能算法规划出新的目标点或新路径进行动态避障,其中较为简单,实用性较强的为人工势场法,在到达新目标点规避障碍物后回到原航线继续飞行,也更符合空中交通管理规则对民航飞机的避障规定。
5 结论
本文针对无人机交通管理中的路径规划策略,分别从单机的路径规划、多机飞行的任务规划和动态避障三方面的研究进行整理分析。目前研究较多的规划策略是一些智能算法及相应的改进算法,文中对比了其中几个较为主流的算法,以及他们适用的应用场景。在路径规划中人工势场法实用性最强,原理也较为简单,但容易陷入局部最优,可以采用改进算法改善此缺点并加快收敛速度。遗传算法通用性强,全局搜索能力强,通过改进也可以改善寻优精度低、稳定性差的缺点,但算法操作比较复杂。粒子群法相较于遗传算法等更为简单,但也容易陷入局部最优,可以结合其他算法进行改善,同时适用于三维环境建模的系统。在多机飞行任务中,多Agent系统适用于队内无人机目标点不同、出发点不同或任务不同的多机飞行,而编队整体飞行时,需要确定长机与僚机以及互相之间的相对位置。本文在进行这些整合分析后,可以为未来无人机及其空管系统的发展打下理论基础,提供技术参考,在有人机和无人机的融合方面,根据无人机的路径规划策略技术可以减轻管制上的压力,更好地对空域和航线进行分配。
[1]程翔.城市大容量无人机航线管控体系[J].中国高新科技,2019(15):58-61.
[2]钱季平.禁飞管制:无人机管理的现实选择和有效途径[J].环球市场,2016(13):97-98,106.
[3]付其喜,梁晓龙,张佳强,等.无人机低空交通管理系统综述[J].飞行力学,2019,37(2):4-9.
[4]解龙.无人机关键技术[J].中国新通信,2018,20(1):94-95.
[5]王艳红,肖彦海.小型无人机姿态系统的变论域模糊控制[J].自动化技术与应用,2008(9):14-17.
[6]王雪峰,胡潇,杨明,等.无人机空管领域现状分析与空管系统设计[J].现代导航,2016,7(5):330-334.
[7]任丽艳,李英成,薛艳丽,等.基于北斗技术的无人机飞行监管系统开发与应用[J].国土资源遥感,2018,117(2):241-245.
[8]于清媛.管制区域无人机防碰撞技术研究[D].德阳:中国民用航空飞行学院,2018.
[9]李楠,刘朋,邓人博,等.基于改进遗传算法的无人机三维航路规划[J].计算机仿真,2017,34(12):22-25,35.
[10]鱼佳欣,周春来,刘东平.改进遗传算法的无人机航路规划与仿真[J].计算机仿真,2013(12):23-26.
[11]袁麟博,章卫国,李广文,等.一种基于遗传算法-模式搜索法的无人机路径规划[J].弹箭与制导学报,2009,29(3):285-288.
[12]VOLKAN P Y,BAYSAL O,HACIOGLU A.Path planning for autonomous UAV via vibrational genetic algorithm[J].Aircraft Engineering and Aerospace Technology,2007,79(4):352-359.
[13]ROBERGE V,TARBOUCHI M,LABONTE G .Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning[J].IEEE Transactions on Industrial Informatics,2013,9(1):132-141.
[14]于振中,闫继宏,赵杰,等.改进人工势场法的移动机器人路径规划[J].哈尔滨工业大学学报,2011,43(1):50-55.
[15]CHANG K,XIA Y,HUANG K .UAV formation control design with obstacle avoidance in dynamic three- dimensional environment[J].SpringerPlus,2016,5(1):1124.
[16]毛晨悦,吴鹏勇.基于人工势场法的无人机路径规划避障算法[J].电子科技,2019(7):65-70.
[17]丁家如,杜昌平,赵耀,等.基于改进人工势场法的无人机路径规划算法[J].计算机应用,2016(1):287-290.
[18]焦振江,王正平.基于改进蚁群算法的无人机航路规划[J].航空计算技术,2006(4):112-114,118.
[19]唐立,郝鹏,张学军.基于改进蚁群算法的山区无人机路径规划方法[J].交通运输系统工程与信息,2019,19(1):158-164.
[20]金飞虎,洪炳熔,高庆吉.基于蚁群算法的自由飞行空间机器人路径规划[J].机器人,2002(6):47-50.
[21]WEN Y E,DENG-WU M A,FAN H D.Algorithm for low altitude penetration aircraft path planning with improved ant colony algorithm[J].Chinese Journal of Aeronautics,2005,18(4):304-309.
[22]于鸿达,王从庆,贾峰,等.一种基于差分进化混合粒子群算法的多无人机航迹规划[J].电光与控制,2018,239(5):26-29.
[23]张航,刘梓溪.基于量子行为粒子群算法的微型飞行器三维路径规划[J].中南大学学报(自然科学版),2013(Suppl 2):58-62.
[24]LIN L,GOODRICH M A.Hierarchical heuristic search using a gaussian mixture model for UAV coverage planning[J].IEEE Transactions on Cybernetics,2014,44(12):2532-2544.
[25]赵文婷,彭俊毅.基于VORONOI图的无人机航迹规划[J].系统仿真学报,2006(Suppl 2):159-162,165.
[26]符小卫,高晓光.一种无人机路径规划算法研究[J].系统仿真学报,2004(1):22-23.
[27]PEI-BEI M,ZUO-E F,JUN J.Cooperative control of multi-UAV with time constraint in the threat environment[C]//2014 IEEE Chinese Guidance,Navigation and Control Conference(CGNCC),2014.
[28]董世友,龙国庆.网络环境下的基于Agent的多架无 人机的任务规划系统[J].弹箭与制导学报,2005 (Suppl 3):189-191.
[29]孙小雷,齐乃明,董程,等.无人机任务分配与航迹规划协同控制方法[J].系统工程与电子技术,2015,37(12):2772-2776.
[30]王福星.基于粒子群优化算法的多无人机自组织控制[D].南京:南京邮电大学,2019.
[31]贾振.基于多区域分级式的无人机编队控制算法研究[D].南京:南京邮电大学,2019.
[32]褚政,郭分林,粘松雷.基于多Agent无人机协同侦察任务规划模型[J].指挥控制与仿真,2016,38(5):21-27.
[33]HU J F,FENG G.Distributed tracking control of leader-follower multi-agent systems under noisy measurement[J].Automatica,2010,46(8):1382-1387.
[34]张佳龙,闫建国,张普.基于改进人工势场的无人机编队避障控制研究[J].西安交通大学学报,2018,52(11):112-119.
[35]刘艳,阳周明,冯运铎,等.基于改进人工势能的无人机编队与避障[J].火力与指挥控制,2018,43(12):118-122.
[36]于清媛.管制区域无人机防碰撞技术研究[D].德阳:中国民用航空飞行学院,2018.
[37]朱海锋.基于立体视觉的无人机感知与规避研究[D].西安:西北工业大学,2016.
[38]杨磊,陈凤翔,陈科羽,等.基于多传感器的无人机避障方法研究及应用[J].计算机测量与控制,2019,27(1):280-283.
黄静洋(1992—),女,硕士学历,毕业于电子科技大学自动化工程学院,助教,主要从事新能源控制工程和空中交通管制研究。
中国民航局安全能力建设SA项目“基于GIS的航空器搜寻区域三维可视化研究”资助(编号:TM2017-232-1/3)
2095-6835(2020)06-0003-05
V249.1
A
10.15913/j.cnki.kjycx.2020.06.002
〔编辑:严丽琴〕
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24
指挥控制与仿真(2021年3期)2021-06-15
科技创新导报(2021年33期)2021-04-17
汽车工程(2021年12期)2021-03-08
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
北京汽车(2019年4期)2019-09-17
好孩子画报(2019年10期)2019-01-10
中国市场(2016年32期)2016-12-06
电脑知识与技术(2016年22期)2016-10-31