基于嵌入式系统开发的仿生爬虫型智能浇花机器人设计
2020-04-20 11:31张泽学
价值工程 2020年7期
关键词:嵌入式系统
张泽学


摘要:本文基于嵌入式开发系统,结合了WIFI无线通信技术、手机APP操作系统、仿生技术、传感器技术建立的一套仿生浇花机器人系统。
Abstract: This thesis is based on embedded development system. A set of bionic watering robot system is established by combining WiFi wireless communication technology, mobile phone app operating system, bionic technology and sensor technology.
关键词:嵌入式系统;仿生技术;浇花机器人
0 引言
随着人们生活水平的日益提高,人们对家居环境和空气质量的要求也越来越高。人们往往会通过养植一些绿色植物来改善家居环境和空气质量,还可以达到缓解工作压力、放松心情的目的。与此同时,网络技术和智能手机的快速发展,用户可以通过手机APP对设备系统进行远程预警监控。基于手机APP的监控系统能为设备的制造方和使用方都带来极高的经济利益。设备使用方能随时远程掌握设备的运行状态,这样即可提高设备运行的可靠性,避免因设备故障带来不必要的损失。本文设计开发了一款基于嵌入式技术,且融合仿生技术、手机APP软件无线监控技术、WIFI通信技術的智能浇花机器人。
1 功能描述及系统组成
该机器人是通过两支柔性弯曲传感器模拟爬虫的左右触须,在其行进过程中,如果探测到植物位置,立即停车浇水,浇水量选择是由弯曲传感器的形变程度大小决定的,这样即可达到节能减排目的。此外,用户还可以利用WIFI网络,结合手机端APP对机器人进行短距离遥控浇花,也可以对机器人进行预约定时浇花。机器人自身具有蓄水箱液位检测、直流电机自适应调速、电池电量检测及红外循迹等功能,这些功能都可以为机器人正常工作,提供安全保障。
①硬件设计:完成基于嵌入式开发系统的仿生浇花机器人的开发、设计与制作,包括电源模块、内部AD转化对电源模块的电压检测部分、弯曲度传感器及液位传感器的测量部分、电机驱动部分、红外传感器循迹部分、机器人的麦克纳姆轮执行运动部分、WIFI无线通信部分。本设计通过嵌入式开发系统对各类传感器采集到的信息进行初步处理,并对整个硬件系统进行智能控制。硬件设计可以实现机器人按照设定路线循迹,通过多种传感器组合实时采集植物的各项参数,并将经过嵌入式系统处理后的信息通过WIFI无线通信传递给手机APP端。
②软件设计:系统软件设计是通过WIFI无线通信技术,将处理的数据发送给用户手机APP端上,从而使用户了解机器人的各项参数,可以在手机APP端上对机器人发送相关的指令,进而控制机器人进行相应的浇花操作。在软件设计中,最重要的就是在安卓系统建立一个与仿生浇花机器人配套的手机APP系统。
2 系统设计内容
本文主要分为机器人运动系统、传感器测量系统、WIFI网络通讯系统和软件APP软件系统四个部分。系统总框图如图1所示。
2.1 机器人运动系统
电源模块为整个系统提供电能,利用光电测速码盘对电机的转速进行测量,采用麦克纳姆轮的相应算法,通过PWM技术控制四个电机转速,实现机器人的全方位运动的效果。机器人运动系统框图如图2所示。
2.2 传感器测量系统
利用红外循迹模块,规划机器人的浇花运动路线,并使机器人按照此路线进行浇花操作。利用弯曲度传感器模仿爬虫的左右触须,从而探测到植物位置,实现避障功能;通过弯曲度传感器的弯曲形变程度,判断出植物茂密程度,并按照疏密程度计算水量,从而立即停车浇水。利用蓄水箱的液位传感器,对蓄水箱中的水位进行判断,当水位不足时,及时发出警报信息通过WIFI发送给用户手机APP端,提醒用户及时蓄水。利用内部AD转化对机器人的电源模块进行电压检测,当电压不足时,将警报信息也通过WIFI发送给用户手机APP端,提醒用户及时蓄电。
2.3 WIFI网络无线通信系统
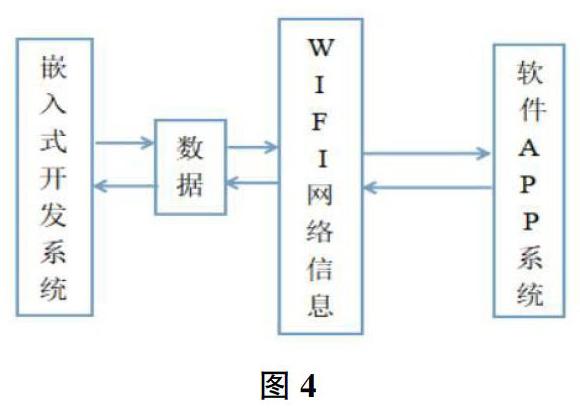
利用WIFI网络无线通信,结合手机APP系统,将机器人测量出的植物所处环境的实时参数,短距离传输给用户,用户即可通过手机APP系统遥控机器人进行浇花。利用JAVA开发语言在Android Studio软件上开发一个与系统匹配的手机端APP操作系统。手机APP系统如图4所示。
3 结论
本文设计一款基于嵌入式系统并且融合了功能仿生技术、手机APP无线监控控制技术、WIFI无线通信技术的仿生浇花机器人,其通过仿生爬行类的路径规划、触角进行循迹和避障,通过手机APP的监控控制系统实现无线监控和控制自动化浇花的功能,并通过WIFI实现软硬件之间的无线通信。使用者可以通过手机APP系统获取盆栽的实时状态,从而控制浇花机器人的浇花的时间和浇花的水量。由此可见,仿生浇花机器人包含了功能仿生、自动控制、人工智能、机械工程、信息融合和传感器技术,是自主性、适应性和交互性综合为一体的一项设计系统,其具有可控化程度大、自动化程度高、生产成本低、操作简易快捷等优点。从而可以帮助使用者准确高效的完成照顾盆栽和浇花的任务,提高人们的生活舒适度和幸福感。
参考文献:
[1]崔庆权,宁晶.多节点网络化智能盆栽浇花机器人的研究[J].电子测量技术,2019,01.
[2]张鹏,张樱凡.基于LPC1768的智能浇花机器人设计[J].自动化与仪器仪表,2015,03.
[3]黄勇华.一种视觉室内浇花机器人的设计[J].南方农机,2019,11.
猜你喜欢