
一种六自由度机械手的结构设计
2020-04-22 06:51陈珂冯卓群杨俊胡亮王一波傅宇文
机械制造与自动化 2020年1期
陈珂,冯卓群,杨俊,胡亮,王一波,傅宇文
(1. 上海航天控制技术研究所,上海 201101; 2. 中国航天科技集团公司 红外探测技术研发中心,上海 201101; 3. 南京航空航天大学,江苏 南京 210016)
0 引言
伴随着现代工业自动化水平的不断提高,机械手在批量化生产中逐步发挥着不可替代的作用。当武器装备还处在预研阶段时,生产制造的目的只是去验证理论设计的合理性,所以此阶段对产量的要求并不高,但是当产品进入批产阶段,产品的需求量则会在短时间内成百倍甚至千倍的暴增。产量的增加会带来一些问题:第一,当产品还处于研制阶段的时候,装调人员十分有限,但是这部分装调人员往往具有不可替代的特点,且在短期内培养出类似的人才可能性较小。如果在产品没有正式批产前储备相应人才,又需要付出相应的人力物力,这其中不可控因素太多,风险太大。第二,同一批次的产品,由不同的装调人员装配出来,其各方面性能可能会有所差异,难以把控。第三,某型号的装调人员往往只是对本型号的产品熟悉,若是调换到其他型号生产线上,往往需要较长的适应期。基于以上3点原因,着手设计一款机械手,以便于在装备批产这一重复性要求较大的生产过程中完成抓取、运输、装配等一系列动作[1]。
1 六自由度机械手的理论基础及模型设计
1.1 六自由度机械手设计
首先从工作范围、占据空间等因素对几种典型机械手的构型进行了比较,其中R表示转动关节,P表示移动关节,如表1所示。在综合考虑了机械手的工作空间大小、定位精度、自身所占用空间以及实际工况等因素,决定选用关节配置为RRR型机械手构型。

表1 经典机械手结构
一般情况下,六自由度串联机械手的运动学逆解都没有封闭解,若想存在封闭解,则需要满足Pieper准则[1-2]:
1) 3个相邻关节中心线相互平行;
2) 3个相邻关节中心线交于一点。
六自由度机械手主要是由关节、连杆、基座等部分组成。为保证足够的装配精度,机械手各关节采用超声电机驱动,共配置6台电机。各关节部分采用模块化关节设计,将电机、减速器、传感器合为一体,方便后续的更换和维修,按照关节的负载大小,将机械手的关节分为两部分,即大负载关节和小负载关节。
在CATIA中绘制出机械手的三维模型,如图1所示。

图1 六自由度机械手的三维模型
六自由度机械手在进行装配时,其底座固定于平台上,以保证其作业的稳定性。6个关节的理论转角均为360°,关节与关节之间利用连杆以及法兰盘进行连接,其中关节1、关节2、关节3采用加装谐波减速器的方式来增大电机的输出力矩,而后面的3个关节,则采用电机直接驱动的方式保证其精度。
1.2 六自由度机械手的正运动学模型
机械手的正运动学模型[3]主要由下面4个参数来描述。
对照图1,可以得出机械手的DH参数表[4],如表2所示。
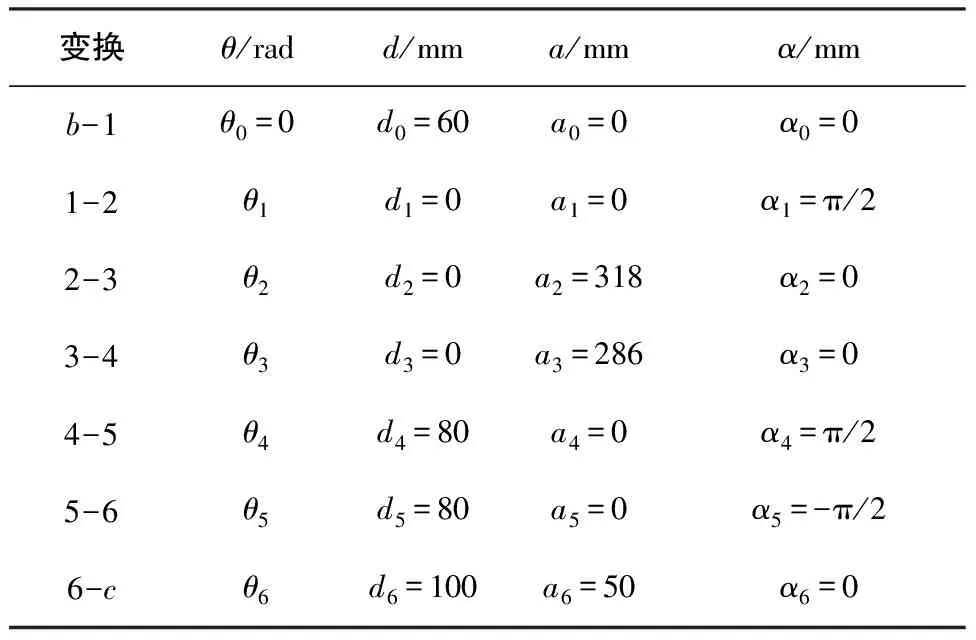
表2 六自由度机械手的DH参数表
利用MATLAB中的Robotics Toolboxs工具箱,绘制出机械手的连杆坐标系模型,如图2所示,其中各圆柱的中心是连杆坐标系的原点,图2和图1所示的连杆模型位姿一致,从而验证了DH参数表的正确性,并建立起了机械手的正运动学模型[5]。

图2 MATLAB连杆模型
1.3 六自由度机械手的结构强度分析
在CATIA中为机械手的各个部件定义好材料,软件自动计算出了各个关节的负载数据,如表3所示。

表3 机械手关节负载
由于机械手在实际运动过程中存在惯性力,各关节实际承受的力要比静态时大,这里乘上一个系数1.1,得到了各关节的实际工作阻力。为使机械手壳体有足够的强度,又希望壳体的质量能尽可能地轻便,故选择7075铝合金,其对应的拉伸强度为575MPa,屈服强度为504MPa。将模型导入ANSYS中,定义好材料属性,划分网格,添加对应的载荷,这里取关节1和连杆1这2个受力最大的零件,仿真结果如图3、图4所示。


图3 关节1应力分布图


图4 连杆1应力分布图
从图中可以看出,关节和连杆的最大形变不超过0.01mm,最大应力不超过20MPa,本文所使用7075铝合金的屈服强度为504MPa,取安全系数为1.5,安全应力为33.6MPa,大于20MPa,显然符合强度要求。
2 六自由度机械手的动力学分析[6]
要进行机械手的动力学仿真,首先要对机械手的末端轨迹进行轨迹规划,采用关节空间轨迹规划法[7]。这种方法是针对空间已知曲线中一组相应的关节角值,利用五次多项式插值,得到可求导的关节驱动函数的方法[8]。这里选用验证机械手性能最常见的方圆轨迹。
将CATIA中建立好的模型导入ADAMS中,然后在机械手的底座、关节连接处等部位设置好约束(即对6个旋转关节添加旋转副,对底座添加固定副),并定义好六自由度机械手的材料、密度、弹性模量、泊松比。此外,考虑到实际工况还需要对各关节添加一定的阻尼以贴合真实情况。设置仿真时间为33.4s,末端运动速度为280mm/s,机械手在ADAMS中绘制的仿真轨迹如图5所示。

图5 方圆轨迹
通过仿真测量,ADAMS计算出各关节运动的角速度-时间曲线,角位移-时间曲线,力矩-时间曲线等。此处仅罗列出关节1、关节2的角速度-时间曲线,如图6、图7所示。

图6 关节1角速度-时间曲线

图7 关节2角速度-时间曲线
结合ADAMS计算出的角速度-时间曲线以及力矩-时间曲线,可以对电机进行选型。1、2关节选用GTUSM-60-N-A型电机,为双定子型;3、4、5关节采用GTUSM-60-N-A型电机,为单定子型;第6关节使用GTUSM-30-N-A电机。这里GTUSM表示电机为旋转型行波型,30和60表示的是电机定子尺寸,N表示电机为非磁性材料制成。至此已经完成机械手的构型设计、强度分析以及电机的选型。
3 结语
为了解决武器型号从预研阶段到批产阶段中存在的装配人员不足的问题,设计了一款六自由度机械手。首先,选择了机械手的机械构型为RRR型,结合Pieper准则,确定了机械手的构型。然后在CATIA中绘制出了机械手的三维模型,设置相应的材料,计算出各关节负载,在ANSYS中进行仿真,验证了各个壳体的强度。在空间中对机械手末端的轨迹进行规划,并将机械手的三维模型导入ADAMS中,沿轨迹进行运动,得到了机械手各关节的角速度-时间曲线等,作为电机选型的依据[9-10],为后续的精度补偿、控制等工作打下了基础。
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
装备制造技术(2020年4期)2020-12-25
装备制造技术(2020年2期)2020-12-14
制造技术与机床(2018年11期)2018-11-23
汽车实用技术(2017年16期)2017-09-21
中学生数理化·高一版(2017年3期)2017-07-08
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
