可见光通信与双目视觉的室内定位
2020-05-10 03:03孙森震李广云冯其强
光学精密工程 2020年4期
孙森震,李广云,冯其强,王 力
(中国人民解放军战略支援部队信息工程大学 地理空间信息学院,河南 郑州 450001)
1 引 言
随着中国制造2025、工业4.0产业政策的制定及人工智能技术的快速发展,制造业、服务业对室内移动机器人的需求日益增长。定位技术的性能决定了机器人的应用场景及服务能力。精度高、可靠性强、延时小、成本低的定位技术一直是研究的热点。在移动机器人定位领域,磁导轨定位技术成功应用到自动化工厂车间,但是磁导轨需要预先埋设,线路固定,维护成本较高。基于Wi-Fi、蓝牙的室内定位精度无法满足移动机器人的定位需要,基于超宽带的高精度定位方案布设成本较高,容易受到电磁干扰,规模化应用复杂度高。二维码扫描定位方案,仅需要在地面粘贴二维码导航标签,适用于自动化车间,主要应用在固定的自动化流水线上,具有高精度、高可靠性的特点,但定位范围有限。室内移动机器人SLAM导航方法在人员移动环境中容易受到干扰[1],因此多种定位技术融合是移动机器人定位导航技术的主要手段[2]。
随着LED照明系统的广泛应用,基于可见光通信(Visible Light Communication, VLC)的室内定位技术引起了业界的广泛重视。国内外研究人员纷纷提出基于可见光通信的室内定位方法,这些方法可以分为成像和非成像两种方式[3]。非成像方式主要利用光电探测器(Photo-Diode, PD)感知接收可见光信号,通过信号强度和编码把定位问题转化为三角测量或场景分析问题[3-4]。此类方法需要接收多个LED光源信息,对光源信号调制及分布要求较高,容易受到环境的影响[5]。针对这一问题,文献[6-8]利用智能算法提升定位精度并进行了仿真,文献[9]使用人工神经网络对信道参数进行拟合,在1 m×1 m×1.2 m的实验测试中获得了较高的精度。智能算法可以提升可见光非成像定位方式的定位精度,但算法复杂度较高,工程部署难度大。成像方式主要利用LED光源显著的计算机视觉特征和通信能力,通过摄影测量方法实现高精度定位。可见光成像测量的精度主要受所使用成像传感器的分辨率、成像距离及光源中心提取精度的影响[10]。使用单个成像传感器通常需要同时对3个以上的光源进行成像,且成像姿态受限,应用难度较大。针对这一问题,文献[11]提出使用双图像传感器的成像定位方法,利用两个LED光源实现了厘米级定位,并能够提供航向角纠正,但该方法假定双图像传感器无倾斜姿态,且假设光源已经识别。文献[12-14]采用单个图像传感器与姿态传感器(IMU)结合的方式,利用成像卷帘快门效应实现对LED标签信息(LED-ID)的识别,受成像通信距离的限制,成像传感器与LED距离较近,且对成像传感器的帧率和图像处理速率有较高要求。文献[15]利用单个成像传感器对两个LED进行成像通信定位,在0.8 m×0.8 m×2 m的实验环境中实现了厘米级定位,并解决了光源识别问题,但成像通信对成像姿态角度要求较高,且不适合移动定位。室内移动机器人多集成双目图像和惯性测量单元(Inertial Measurement Unit,IMU)传感器,可见光成像定位方式可以充分利用已有光源设施,但是要满足精度高、延时小的室内移动定位仍然存在一定的技术难度,需要解决传感器集成标定、光源探测识别跟踪[16]、连续图像匹配[17]和快速动态位置计算等难题。
针对室内移动机器人定位导航的应用需求,本文提出一种基于可见光通信与双目视觉测量的室内定位方法,并制作了双目视觉定位模块验证了该方法的适用性。
2 定位方法
2.1 可见光室内定位方法设计与场景分析
基于LED-ID的VLC定位方法[4]能够满足室内定位米级定位需要,易于部署,接收解码简单,对硬件性能要求较低,定位速度较快。为适用典型室内应用场景,提高定位的稳定性与可靠性,如图1所示,将双目视觉传感器、IMU、PD、微处理器及电源集成为定位模块,当定位模块处于光源P下方时,通过PD接收光源LED-ID信息并解析,实现光源世界坐标的获取。然后使用双目图像传感器对光源进行成像,在双目视觉坐标系中计算光源P相对于定位模块中心d的坐标向量l;在成像同时使用IMU记录成像的三维角度,根据光源P的世界坐标及成像姿态角将双目视觉坐标系与世界坐标系进行转换,得到定位模块相对光源P的世界坐标,实现三维定位。
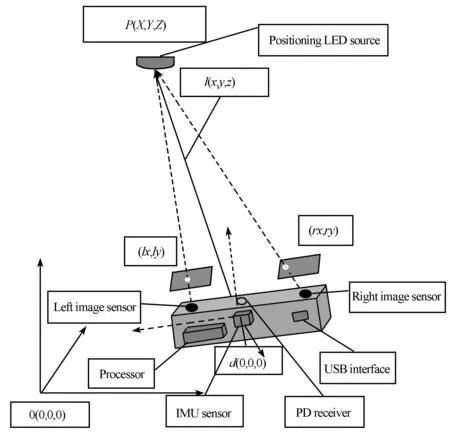
图1 定位方法示意图Fig.1 Schematic diagram of positioning method

图2 室内LED光源布局情况Fig.2 Layout of indoor LED light source
目前,室内LED光源主要为圆形射灯,直径为7 cm,单个光源功率一般为5~7 W。图2为某建筑区域内部光源布局所示,多为两个相距0.6 m的光源为一组,相邻组光源间距约2 m。廊道光源之间相距2.5 m,光源距离地面高度为3.1 m。针对图2场景,需要解决单灯与双灯光源识别、光源中心提取、双目视觉坐标系与IMU坐标系标定以及双目成像测量快速解算等问题。
2.2 定位模块硬件参数及定位区域分析
使用LED-ID方法对应用场景进行光源改造,场景中光源散射角度为60°,在3.1 m高的空间范围内相邻光源照射范围有一定重叠。LED-ID方法通常使用光强型PD,PD通过感知场景光强变化进行信号接收,在光源重叠区域存在信号干扰问题。根据场景中的光源分布特点,定位模块设计参数如表1所示。
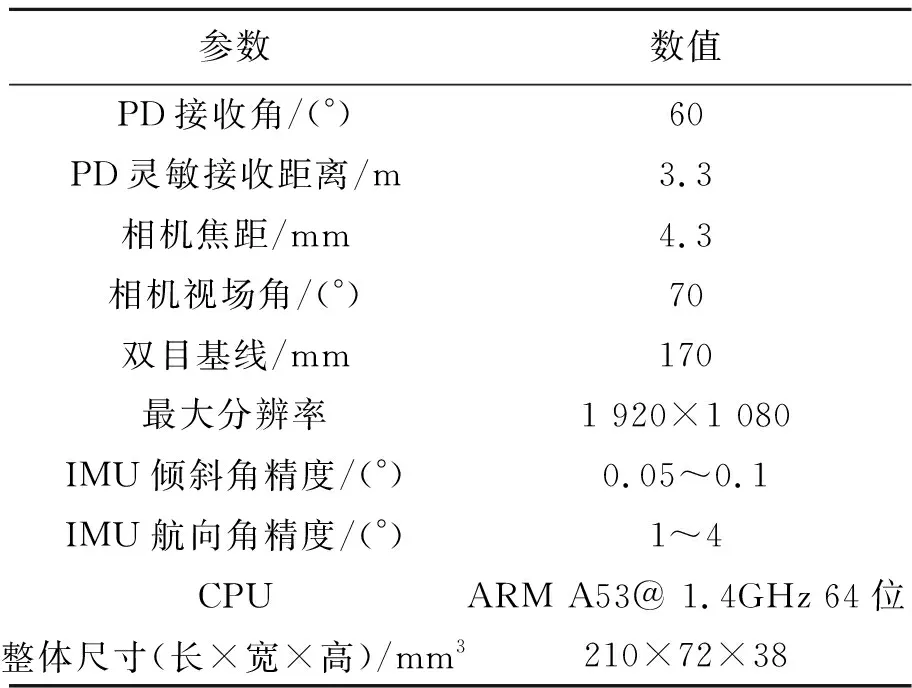
表1 定位模块参数

图3 有效定位空间范围分析Fig.3 Analysis of effective positioning space range
当PD位于光源正下方2 m×2 m区域内时,相互干扰影响较小,因此定位模块选用视场角为70°的双目图像传感器。如图3所示,当定位模块处于光通信灵敏接收区域时接收光源对应的空间坐标信息,同时光通信灵敏区域中具有合适的成像范围,能够对上方的LED光源进行双目视觉测量,并以光源为参考确定自身位置。
2.3 圆形LED光源中心坐标提取
定位模块用于移动机器人视觉,使用普通的CMOS图像传感器,在成像过程中保持曝光值不变,如图4(a)所示,对LED光源的成像具有一定晕光效应,直接使用椭圆法拟合光斑中心方法[18]容易受成像角度影响,光斑中心提取不稳定,影响双目视觉的测量精度[19]。对光源图像进行二值化如图4(b)所示,其光斑为不规则多边形,但基本保持圆形特征。参考图像处理轮廓度量概念[20],以光斑圆度为定权因子使用光斑轮廓质心与光斑椭圆拟合中心的加权平均值作为光源的中心,计算方法为:
(1)
其中α=4πSc/Lc2,为光斑轮廓的圆度,α∈(0.4,1.0);Sc为光斑轮廓的面积,Lc为轮廓的周长,O1为光斑轮廓区域的质心,O2为拟合光斑的外接椭圆的中心。圆度加权拟合法可以提高光源中心提取的稳定性,引入光斑轮廓圆度计算方法可以作为光源识别的依据,提高光源识别的准确度,光源中心提取效果如图4(c)所示。

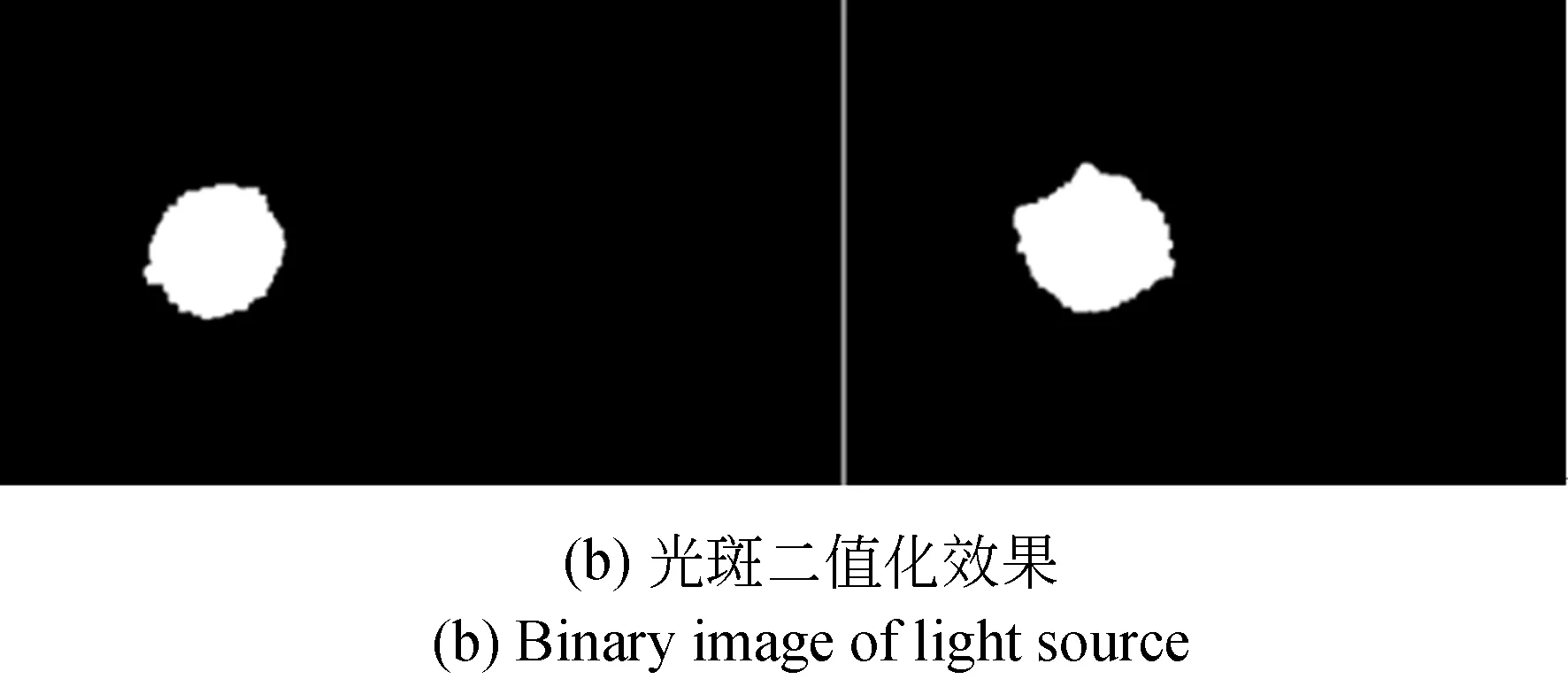
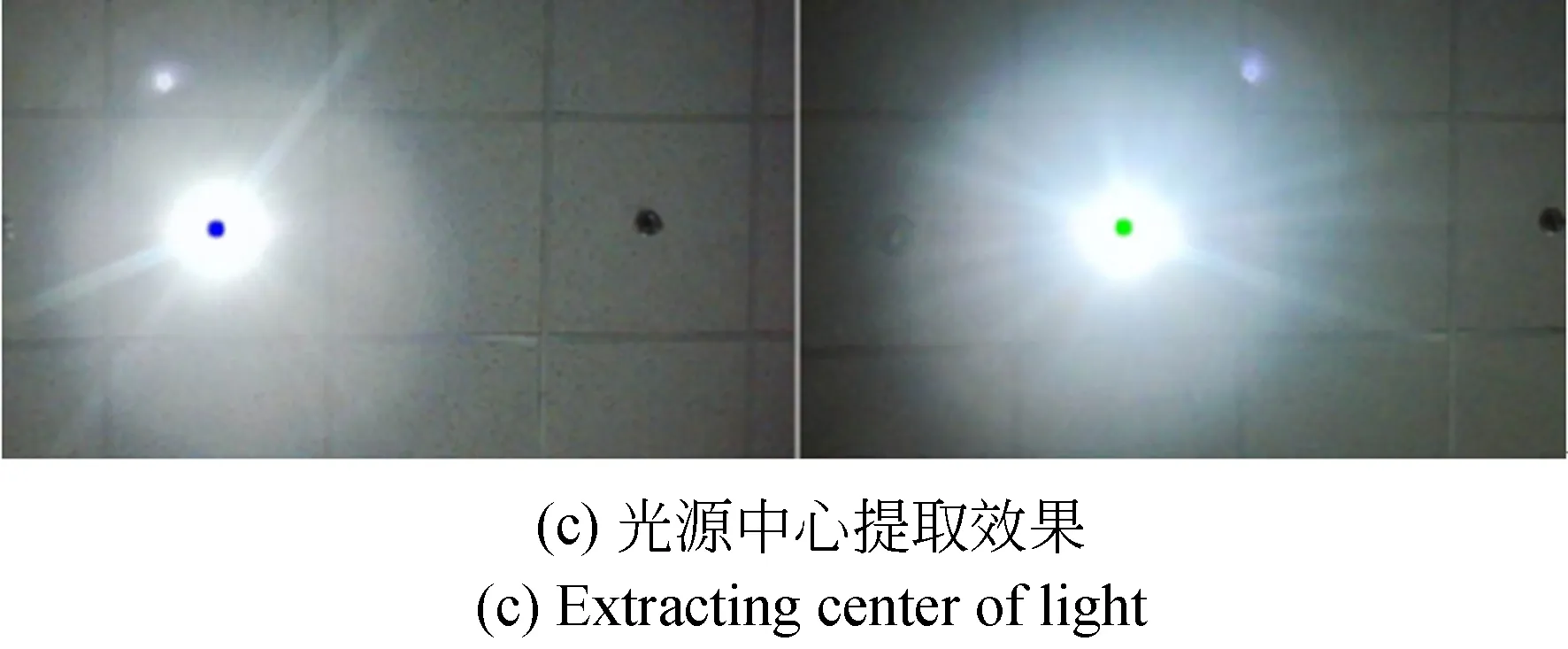
图4 光源成像与中心提取效果Fig.4 Imaging and center extraction of light source
2.4 定位计算过程
使用张氏标定法对定位模块进行双目视觉标定后[21],可知左右相机的内参数及外参数矩阵。如图1所示,设光源中心P在左右相片上的中心坐标为pl(ul,vl),pr(ur,vr),根据双目视觉几何关系采用加权最小二乘算法计算P点在双目视觉坐标系中的空间坐标[22]。以双目基线中间点d作为双目视觉坐标系的原点,则光源中心P相对坐标原点d的坐标向量为l(x,y,z)。设成像空间姿态角(α,β,θ),P点的世界坐标为(X,Y,Z),定位模块中心的世界坐标D的计算方法为:
(2)
旋转矩阵为:
其中:α为俯仰角,β为翻滚角,θ为航向角。
2.5 双目相机与IMU结构参数的标定与检验
双目传感器与IMU在安装时不能保证严格的水平一致,导致IMU测量双目传感器的俯仰角和倾斜角与真实角度存在一个固定差值,需要确定双目相机与IMU的外参数。使用Kalibr工具进行标定[23],根据标定结果对IMU测量的倾斜姿态角进行补偿及定位检验。检验方法如图5(a)所示,将定位模块放置在转台上,双目图像分辨率为1 280×720,以正上方距离1.8 m的视觉点标志为参考进行旋转定位,查看定位点的轨迹分布。模块在转台上旋转一周的定位轨迹趋近为一个点,如图5(b)所示,平面定位结果之差不大于1 cm,表明双目传感器与IMU的参数标定结果满足倾斜姿态补偿精度要求。
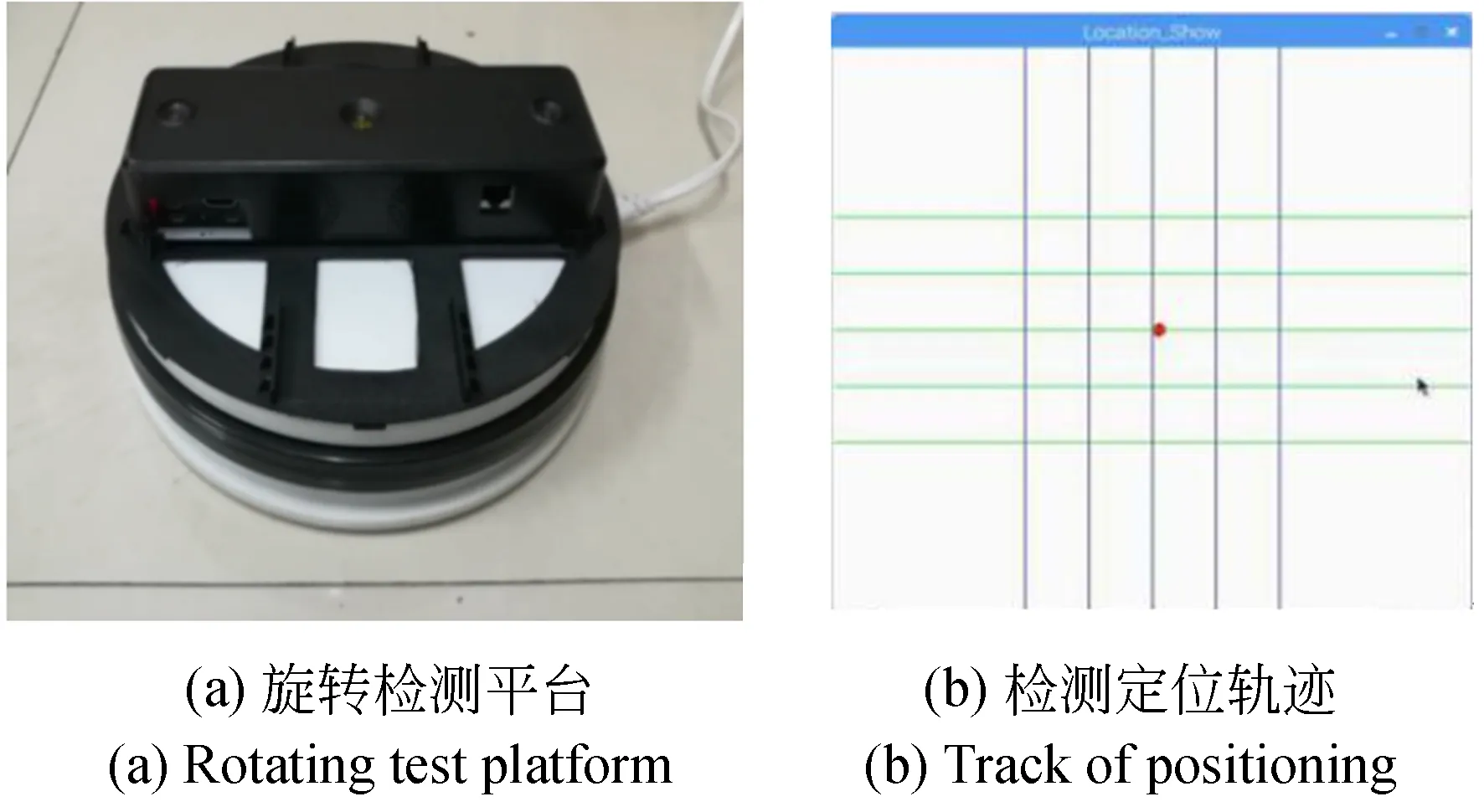
图5 姿态校准检测Fig.5 Attitude calibration detection
2.6 双灯识别与定向纠正
两个光源与LED-ID提供的世界坐标对应关系有两种情况,分别根据两种情况计算定位模块的航向角,将计算结果与定位模块IMU提供的航向角比较,以差值作为匹配关系,具体流程如图6所示。其中C值取50,通过该流程能够实现双灯的识别与坐标匹配,同时对IMU的航向角进行了定向纠正。

图6 光源识别定向流程Fig.6 Light source identification and orientation process
在图2场景中,当定位模块位于相距0.6 m的双灯下方时,双目图像中存在两个光源,双灯匹配效果如图7所示。
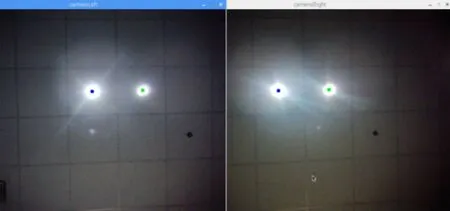
图7 双灯识别效果Fig.7 Images of dual-lamp light source recognition
3 实 验
3.1 单灯定位测试
以单个光源作为定位参考,使用全站仪作为辅助测量手段建立空间坐标系。设光源中心坐标为(0,0,310 cm),定位模块放置在平面坐标为(50 cm,50 cm)高度不同的平台上进行旋转定位测试,并记录三维方向上的最大误差,最大误差的变化趋势如图8所示。

图8 单灯定位模块定位误差测试Fig.8 Positioning errors of positioning module with single LED source
在2 m×2 m范围内设置距离光源高度为260 cm的5×5的网格点上进行旋转定位测试,定位点的轨迹分布如图9所示。网格点(100 cm,100 cm,50 cm)处定位轨迹中心坐标为(97.6 cm,102.1 cm,51.1 cm),三维方向上的定位误差随航向角误差的变化趋势如图10所示,其中平面定位误差随航向角误差的变化趋势一致,航向角误差的波动范围为7.9°。

图9 单灯旋转定位轨迹分布Fig.9 Distribution of rotation positioning track using a LED

图10 单灯定位误差随航向角的变化情况Fig.10 Variation of single light positioning error with heading angle
在定位模块双目基线固定的情况下,图像分辨率越高定位的精度越高。选用不同的成像分辨在距离光源不同距离时,成像测距的2倍中误差变化如表2所示。选用1 280×720的分辨率时,通过连续跟踪方法缩小光源搜索范围,提高定位解算速度,定位模块的解算频率达到5 Hz以上。
表2 不同成像分辨率下的测距误差
Tab.2 Performance of positioning module at different resolutions
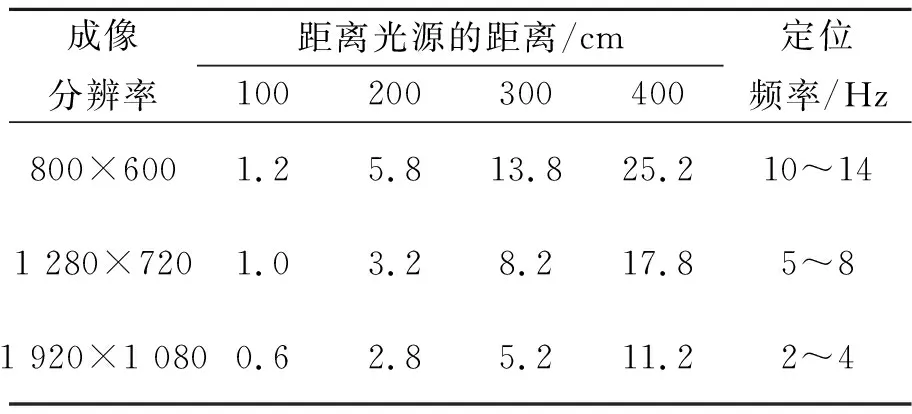
成像分辨率距离光源的距离/cm100200300400定位频率/Hz800×6001.25.813.825.210~141 280×7201.03.28.217.85~81 920×1 0800.62.85.211.22~4
3.2 双灯定位测试
以相距60 cm的两个光源作为定位参考,同样使用全站仪作为辅助测量手段建立坐标系,在2 m×2 m内设置距离光源高度为260 cm的5×5的网格点上,以双灯定位模式进行旋转定位测试,定位结果分布如图11所示。网格点(100 cm,100 cm,50 cm)处的定位轨迹中心坐标为(98.8 cm,99.2 cm,51.8 cm),定位误差随航向角误差的变换趋势如图12所示。三维方向上的定位误差均小于5 cm,平面定位误差随航向角误差的变化趋势仍具有一致性,航向角误差的波动范围为3.1°。
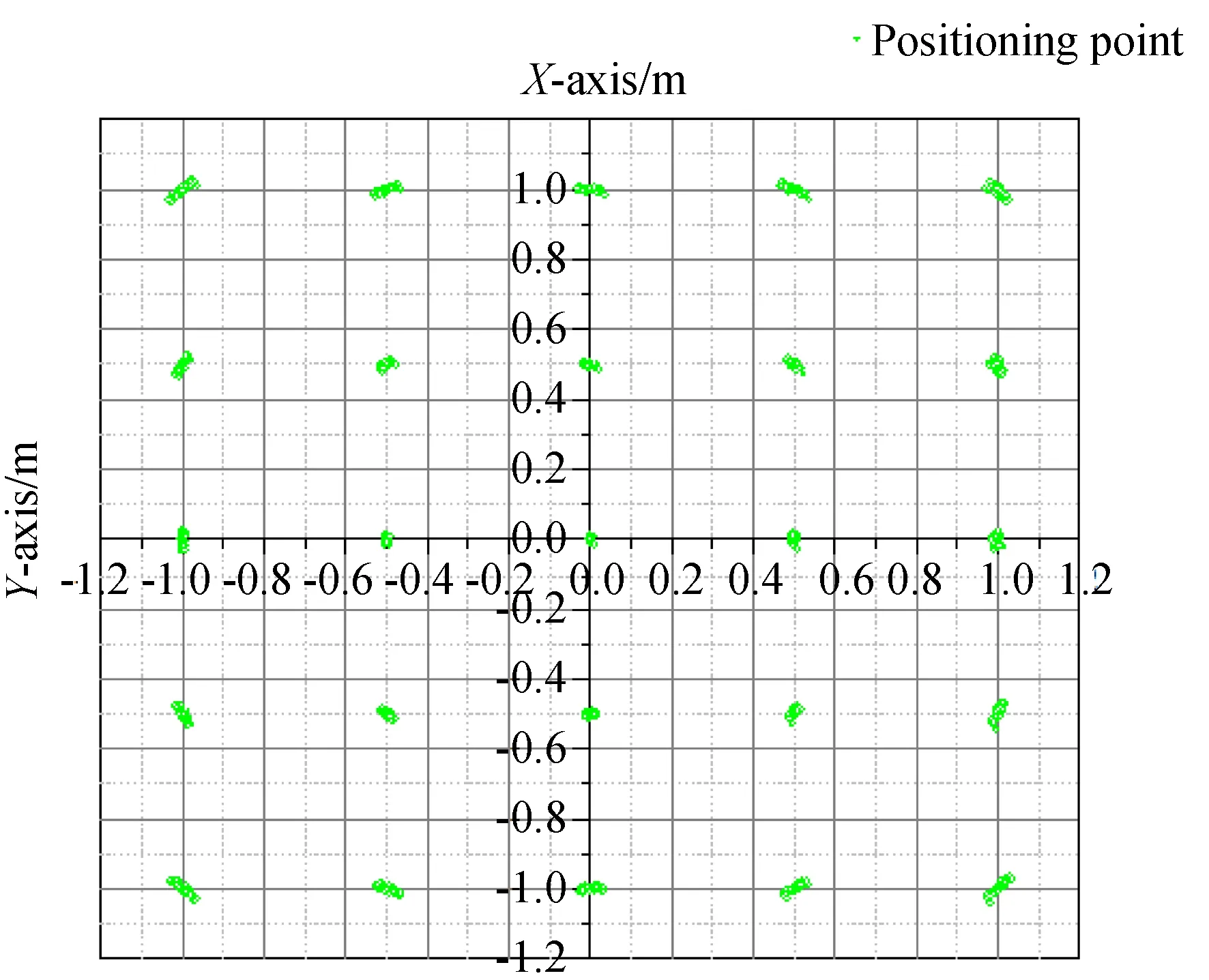
图11 双灯旋转定位轨迹分布Fig.11 Distribution of rotation positioning track using dual LED

图12 双灯定位误差随航向角的变化情况Fig.12 Variation of dual light positioning error with heading angle
3.3 单灯双灯动态定位比较
在同一组光源下高度为90 cm平台上放置定位模块,使定位模块沿着参考点连线做矩形运动,同时使用单灯定位和双灯定位模式进行定位计算,其定位轨迹如图13所示。两种定位模式的定位轨迹基本一致,参考点处的定位误差均小于4 cm。

图13 单灯和双灯模式的定位轨迹Fig.13 Positioning tracks of single and dual light positioning methods
当定位实验平台下方放置磁性物体时,同样使定位模块沿着另一组参考点连线做矩形运动,同时使用单灯定位和双灯定位模式进行定位计算,其定位轨迹如图14所示。双灯定位模式的定位轨迹与参考点连线基本一致,参考点处的最大误差为3.5 cm,单灯定位模式的定位轨迹明显偏离了参考路线,参考点处的最大定位误差为8.5 cm。
在有磁场干扰的定位测试中两种模式的航向角变化如图15所示。单灯模式的航向角波动范围为11.8°,双灯模式的航向角波动范围为3.5°。显然,单灯定位模式航向角受到周围磁场变化的干扰,而双灯定位模式则没有受到该磁场变化的影响。双灯定位模式实现了定向纠正,提高了定位的鲁棒性。
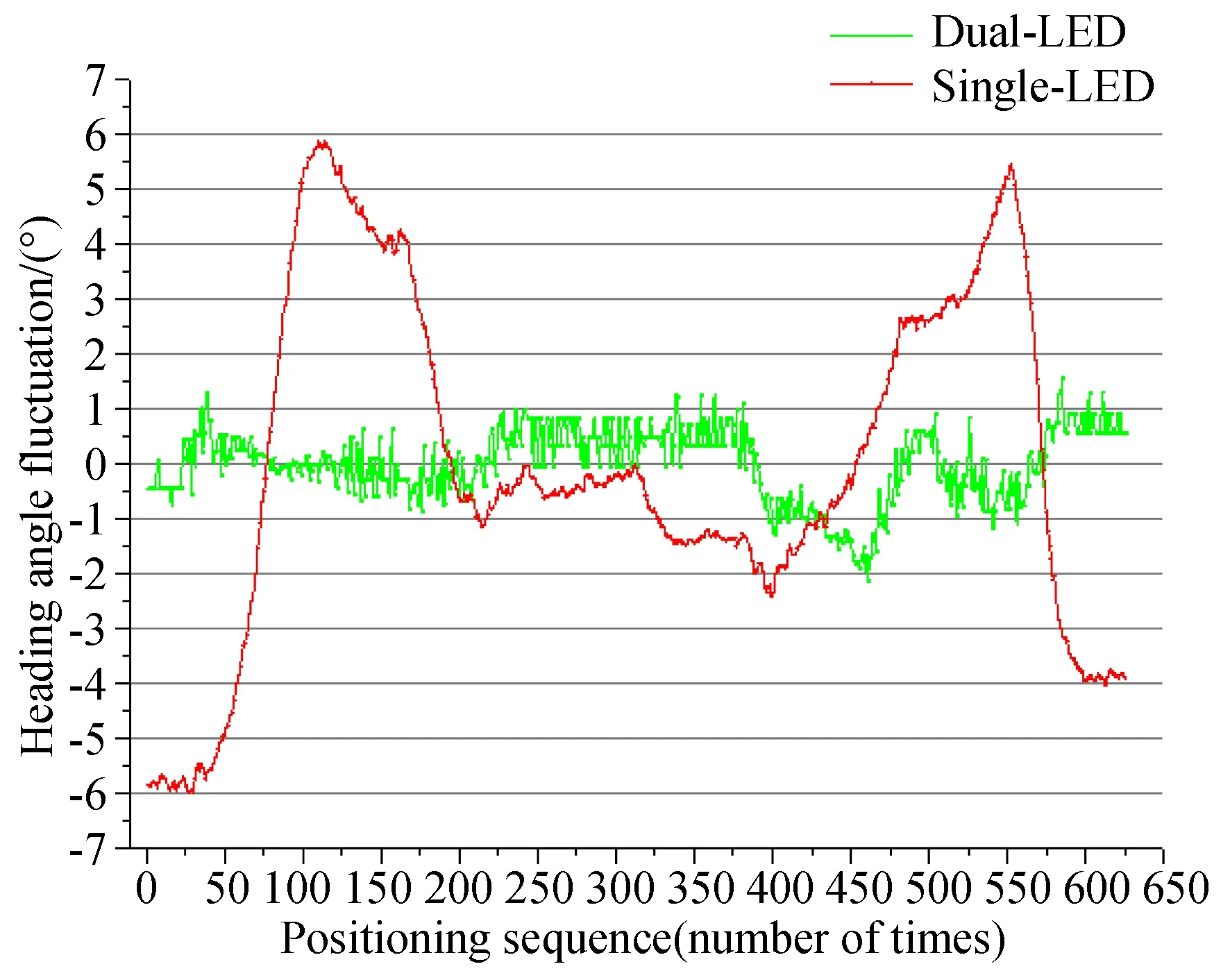
图15 有磁场干扰时单灯和双灯模式的航向角变化Fig.15 Heading angle change in single and dual light positioning methods with magnetic interference
4 结果分析
4.1 单灯定位误差分析
根据误差传播率由式(2)可得定位误差计算公式(3)。根据定位原理,模块的定位误差主要由三部分组成,一是光源中心的世界坐标误差,二是双目视觉测量误差,三是IMU传感器的角度测量误差。在单灯定位模式下,定位模块的航向角以地磁方位角为基准。由于室内环境磁场不均匀,磁传感器提供的方位角误差约为1~4°,如果存在局部强磁干扰,则误差更大,这给单灯定位模式带来了较大误差。当定位模块水平放置时,设α=0,β=0,式(3)可简化为式(4)。由式(4)分析,当定位模块倾斜姿态角较小时,平面定位误差主要与航向角及定位模块相对光源的位置有关,Z轴方向的误差主要与视觉测量精度及模块平面位置有关。
(3)
(4)
4.2 双灯定位误差分析
双灯定位模式使用两个坐标已知的光源作为定向参考。航向角精度与两个光源的世界坐标测量精度及视觉测量精度有关,航向角精度的计算方法为:
(5)
其中:ω1为两个光源世界坐标系的平面相对坐标测量误差,ω2为两个光源中心在双目相机坐标系中的平面相对坐标计算误差,L为两个光源之间的距离。当定位模块水平放置距光源3 m处的定位区域时,根据成像几何关系,光斑中心的提取误差小于7 mm,则两个光源在双目相机坐标系中的平面相对坐标计算误差ω2小于14 mm。两个光源之间的距离L为60 cm,设ω1为4 mm,根据式(5)计算双灯定位模式提供的航向角误差小于1.4°,该精度相对IMU提供的航向角精度提升了一倍以上,且能够抵抗磁场干扰。双灯模式为视觉定位计算提供了更有利的观测条件,有利于提高定位精度和可靠性。
5 结 论
本文提出一种基于可见光通信与双目视觉的室内定位方法,并制作了定位模块进行了系统测试。结果表明,在2 m×2 m×3 m的定位区域内,使用单个LED光源实现了厘米级室内定位,利用两个相距60 cm的LED在定位区域内三维方向上的定位误差均小于5 cm,定位频率大于5 Hz。系统研究了IMU与双目成像传感器集成检校,利用光斑圆度定权法减弱光源成像晕光效应对光源中心的提取误差,在单个LED定位的基础上设计了双LED定位方法,解决了两个光源识别的问题并实现了航向角的纠正,能够抵抗磁场干扰。从工程应用角度出发,基于可见光通信与双目视觉测量融合方式的定位方法,可以利用少量LED光源实现室内高精度移动定位,能够满足室内机器人厘米级移动定位的导航需求。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
新世纪智能(高一语文)(2021年3期)2021-07-16
电子制作(2019年20期)2019-12-04
民用飞机设计与研究(2019年4期)2019-05-21
中国交通信息化(2018年10期)2018-02-16
电子制作(2017年24期)2017-02-02
西安工程大学学报(2016年6期)2017-01-15
中国交通信息化(2016年10期)2016-06-08
中国交通信息化(2016年5期)2016-06-06
照明工程学报(2016年3期)2016-06-01