高分辨力遥感相机CCD采样位置自适应补偿技术
2020-05-10 03:04孙雪晨吕恒毅薛旭成石俊霞
光学精密工程 2020年4期
孙雪晨,吕恒毅,薛旭成,石俊霞,傅 瑶
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
1 引 言
信噪比、动态范围等是空间光学相机设计[1-3]的重要指标,用于表征相机的辐射性能和评价相机图像品质。空间遥感相机电子学系统的性能,会极大程度的影响整个成像系统的成像质量[4]、信噪比[5]和动态范围等。在航天应用中,通常对CCD信号进行相关双采样(Correlated Double Sample,CDS)处理,这样可以消除复位噪声的干扰,对低频噪声也有抑制作用,可以显著改善信噪比,提高信号检测精度[6-7]。
为了使相关双采样信号(SHP,SHD)位置[8]与CCD信号最佳位置对准,通常会在地面实验阶段选取最佳的采样位置,进行固化。但是由于空间环境温度的大范围变化,成像电路的器件会受到温度[9]的影响而产生时序上的延时,从而导致采样位置的不准确。为了解决采样位置受到温度的影响而造成的图像质量下降,曲利新[10]提出将CCD驱动器的输出信号进行分压整形,以此作为采样信号SHP与SHD的基准,去除CCD驱动器件受温度影响后的延时,提高采样信号与CCD信号之间相位的稳定性。在航天应用上,CCD驱动信号种类很多,占空比与采样信号不一致,需要的整形电路过于复杂且难于实现,新加入的电路也会带来新的温度延时效应;而且通过RC(Resistor-Capacitance)电路来调整延迟,精度不足。潘卫军[11]提出对CCD信号采样位置进行自适应调整,实时监测CCD信号的相位变化,在线调整采样时钟相位来保证采样位置,其采样信号的选取依旧利用CCD驱动信号进行分压整形,带来了与上述同样的问题。
针对以上问题,本文首先对造成温度延时的链路进行分析,提出高分辨力遥感相机CCD采样位置自适应补偿技术;然后将该技术用于CCD成像中,并进行了相关实验。实验表明,相关双采样信号的采样位置与CCD信号在温度大范围变化的情况下,仍能精密对准,保证了图像信噪比的稳定性,实现高质量成像。
2 CCD采样位置自适应补偿
成像电子学CCD采样电路的设计中,CCD驱动信号的时序与采样信号(SHP,SHD)的时序均由FPGA给出,其中SHP对复位区进行采样,SHD对信号区进行采样。由于复位区与信号区的信号平坦区域非常小(几纳秒),因此采样位置的确定是相关双采样中最重要的工作,一旦采到其他位置会对图像质量有着很大的影响。在整个CCD采样链路中,驱动信号经过驱动器与CCD从而产生CCD视频信号,视频处理器通过采样信号对CCD视频信号进行采样从而得到图像数据。传统的设计中,采样时序信号由FPGA产生,直接通过视频处理器进行采样,如图1所示。实验表明,在两个链路中受温度影响而产生延时最大的是驱动器芯片,FPGA与CCD器件受环境温度变化产生的延时非常小。由于只有驱动时序经过了CCD驱动芯片,这就带来了采样信号(SHP、SHD)与CCD信号在不同温度下会有不同的延时、信号之间无法跟随的问题。考虑到航天应用的可行性以及稳定性,在不引入过多电路的前提下,在采样信号链路中增加相同的驱动器芯片,使在不同的环境温度下,采样信号与CCD信号产生相同的温度偏移量,补偿驱动器产生的温度延时,达到相位动态跟随的效果,从而获取高质量的图像。该自适应补偿技术信号链路图如图2所示。

图1 传统的CCD采样链路Fig.1 Traditional CCD sampling link

图2 自适应补偿CCD采样链路Fig.2 Adaptive compensation CCD Sampling link
图2中采样信号与视频信号经过相同型号的驱动芯片,在温度发生大范围变化的时候,可以建立起一定的跟随关系。这里假设驱动时序链路上的驱动器A受到温度影响而产生的延时为γ1,采样时序链路上的驱动器B与CCD受到温度影响而产生的延时为γ2与γ3,在温度变化时,两个链路的温度延时之差是一个温变值,将其定义为:
γDelay(T)= |γ1+γ2-γ3|,
(1)
其中T为温度,在设计时将驱动芯片A和B选用同种类芯片,使得γ1与γ2基本一致,而CCD受到温度变化产生的信号延迟γ3非常小,因此该设计使得两个链路之间的延迟γDelay(T)达到最小化,在(-25~60 ℃)的温度范围内,该延时最大仅为0.46 ns,具体参见后续实验。
3 采样位置精密调节
CCD采样链路中,驱动时序与采样时序均由一个FPGA给出,由于两个链路中的信号经过不同的走线与器件到达视频处理器,这会导致采样时两个信号之间存在一个固定的初始相位差。为了获取高质量的图像,需要对采样位置进行精密调节,使其对准于CCD信号的最佳位置。利用DCM的PhaseShift功能可以实现输入时钟的相位移动,以达到对采样位置的精密调节。DCM的PhaseShift功能包括固定相位移动和可变相位移动,当采用可变相位移动时,可以动态实现输入信号的相位延时,延时时间定义为:
PhaseShift(ns)=
(2)
其中:PhaseShift Value的范围为-255~255,CLKINperiod为CCD像元时钟周期。
使用相位延时后时钟对采样信号进行同步,即可实现采样位置的高精度延时,如图3所示。本文成像系统采用100 M时钟,因此调节精度可达到0.039 ns(10 ns/256)。在CCD的复位区和信号区之内调节采样位置SHP与SHD,调节范围各为±1 ns(信号平坦区),在该范围内调节到最佳位置。
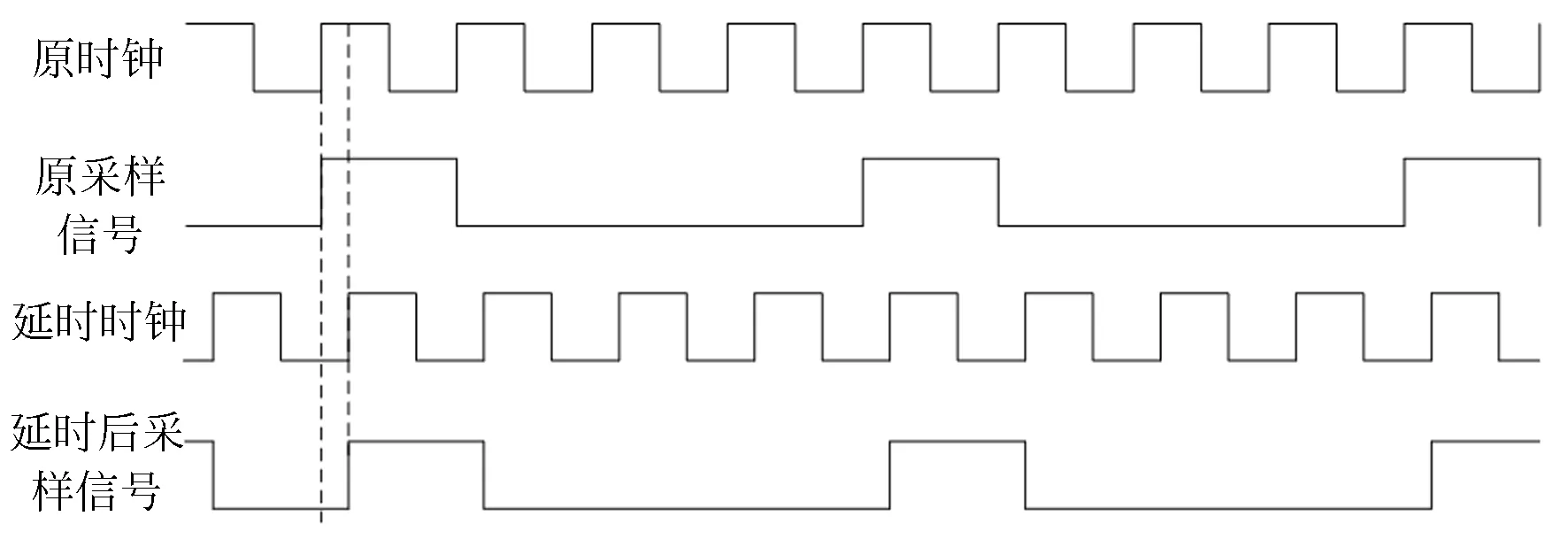
图3 采样信号同步时序图Fig.3 Sampling signal synchronization timing
未进行精密调节时双采样初始相位误差约为2.3 ns,采用本文方法精密调节后误差可小于0.039 ns。
4 温度动态适应性实验与分析
为验证该方法的可行性,将带有自适应补偿技术设计与传统方法的两个测试系统进行对比成像。将两个测试系统放于高低温箱中,在常温下(25 ℃)分别对两个成像系统的初始采样位置(SHP,SHD)进行精密调节,保证两个系统在常温下初始采样位置都处在最佳点,成像质量良好。在-25~60 ℃(空间相机地面环境试验测试温度)的温度范围下对两个系统分别进行成像试验,并实时监测CCD采样位置。其中每副图像中左右两部分各为全色图像和多光谱图像。
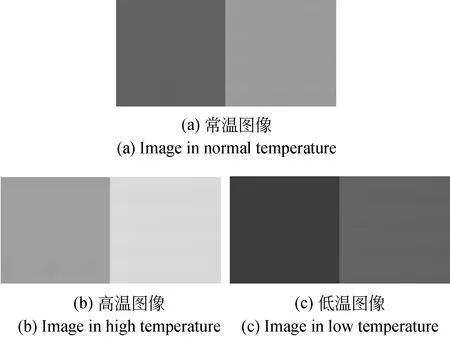
图4 传统方法图像Fig.4 Image with and traditional method
从图5高低温图像与常温图像的对比可以看出,带有本文方法的测试系统在高低温下成像效果均良好,全色图像与多光谱图像均与常温对比没有明显变化。而传统方法的测试系统在高温和低温的情况下,图像的均匀性以及成像质量受到了温度的影响,在高温条件下,全色图像与多光谱图像均出现不同程度的饱和现象,低温条件下,图像较常温图像变暗,如图4所示。
图6是示波器采集的不同温度下传统方法中CCD信号与采样信号的相对位置图,高温时CCD信号由于驱动芯片的原因,相位滞后于采样信号,导致采样信号SHP采到了CCD的复位电平上,图像数据出现错误。低温时CCD信号由于受到驱动芯片的影响,相位提前于采样信号,使采样信号SHD落在了下一个信号的上升沿,得到的图像偏暗。

图5 本文方法图像Fig.5 Image with proposed method



图6 传统方法采样位置Fig.6 Sampling position with traditional method
在-25~60 ℃的温度范围下,对各温度点下的相关双采样信号采样位置与常温下(25 ℃)的最佳位置之间的延时进行了测试,同时与传统方法的采样位置延时进行了对比,结果如图7所示。可以很明显的看出,在温度大范围变化时,本文方法的采样位置延时量远小于传统方法。其中采样位置受温度而产生的延时最大值为0.46 ns,采样信号依然落在CCD信号可采样范围之内,不会对成像质量造成影响。

图7 本文方法采样位置偏移量与传统方法采样位置偏移量Fig.7 Sampling position offset with proposed method and traditional method
5 结 论
本文根据遥感相机在空间工作时大范围温度变化的现状,提出了遥感相机CCD采样位置自适应补偿技术。文中首先对成像链路中的温度延时进行了分析,针对延时电路给出了航天应用中可以实现的温度补偿方法,并对采样位置进行初始精密调节。对本文的方法与传统方法进行了高低温试验对比及分析,试验结果表明:相关双采样信号的初始位置调节精度小于0.039 ns;在-25~60 ℃的温度范围下,相关双采样信号延时最大值为0.46 ns,保证了准确的采样位置,成像质量均为良好。该方法已在某空间遥感相机上得到了在轨应用,下传图像的质量良好。
猜你喜欢
小猕猴智力画刊(2022年3期)2022-03-28
北华大学学报(自然科学版)(2021年3期)2021-07-13
自动化仪表(2020年10期)2020-11-13
电脑爱好者(2020年6期)2020-05-26
铁道建筑技术(2020年11期)2020-05-22
电子制作(2019年14期)2019-08-20
电子制作(2017年13期)2017-12-15
北京航空航天大学学报(2017年5期)2017-11-23
自动化学报(2016年5期)2016-04-16
船舶力学(2015年6期)2015-12-12