焊接机器人在转向架构架焊接中的运用
2020-05-25 20:00赵克磊江昆于海源徐西振
大众科学·上旬 2020年3期
关键词:焊接机器人
赵克磊 江昆 于海源 徐西振
摘 要:焊接机器人是目前相关企业使用次数比较频繁的一种自动焊设备,可以妥善处理大型结构部件多位置焊接不易翻身的難题。鉴于此,本文首先阐述了焊机机器人系统在转向架构架焊接中的运用,接着对机器人系统应用情况进行探讨,旨在全面提高转向架构架焊接质量。
关键词:焊接机器人;转向架构;均一性;侧架焊接
引言
从机械人系统的角度出发来讲,对其进行充分利用,可以提高焊接质量,以此来促进其工作水平的全面提升。操作流程不复杂,而采取示教编程方式,可以制定出切实可行的焊接程序,令焊角的尺寸以及焊缝填充要求得到满足。
1焊机机器人系统在转向架构架焊接中的运用
1.1电气控制系统
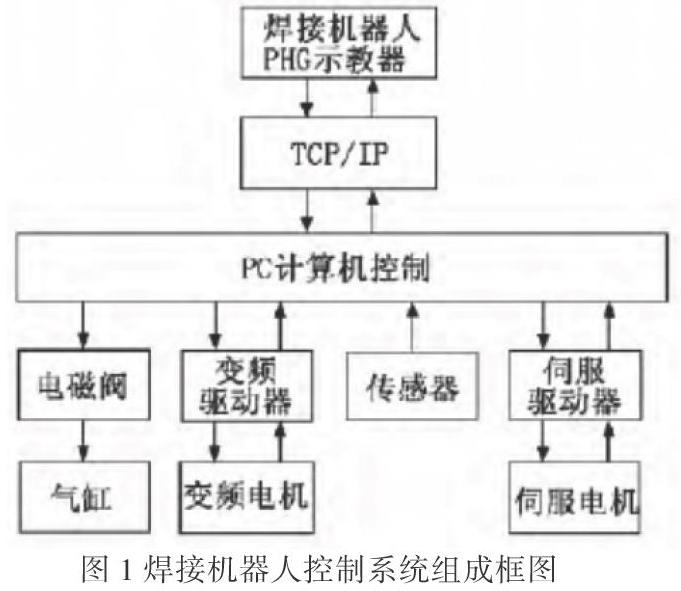
通常情况下,焊接机器人控制系统主要由以下几个部分一起组成:一是PHG示教器;二是计算机;三是控制柜等(具体内容请看图1所示)。
把PHG示教器当作核心,相关人员采取针对性的手段将以太网有机的和PC计算机结合在一起,以此来实现对机器人状态的科学控制。所谓PHG示教器,简单的说是在充分结合在线示教编程技术的基础上,选择与之相匹配的可触碰示教器,并在其上面安装一定数量的红色按钮控制。当成功接通电源以后,就会将机器人的图表展示出来。相应控制柜上方设有间盘,左侧面分别连接电缆,在间盘盒的内部存在驱动与代码显示器。结合相关调查可以发现,控制柜主要由以下几个部分一起组成:一是计算机控制功能;二是总线板;三是电弧跟踪板;四是焊机板等,且还安装了各种模式ID功能开关。针对计算机来说,其主要由CPU主板和FCIF接口板等部分一起组成。
1.2机械传动机构
第一,机械手。随着焊接机械手的有效运用,可以实现11轴联动功能,促使焊接机器人6轴,而变位器是4轴,横向滑轨为1轴。结合相关资料可以发现,该机器人是由6轴一起组合而成的。无论针对哪个轴来说,其都有自身的工作范畴,所以这里值得一提的是,机械人每一个轴都会具备与之相匹配的自由度,同时存在三个基础轴,并且还设置了一定数量的手轴。从机械人的角度出发来讲,其在每个轴上面,都安装了相应的参考值,并在此基础上将这些参考值当作是机器人的参考点进行充分运用。针对2轴来说,其并没有将按钮释放,这两个按钮往往是在机械人发生碰撞时才会使用。就5个外部轴而言,其主要由以下几个部分一同组成:一是4个变位器轴;二是1个横向滑轨轴。因为第7轴扮演着直轴的角色,所以其与其他4个轴在操作模式上存在较大的差异性,其工作范围一般是7米,其他的4个轴属于变位器,并呈现出“L”型的状态,这些均被当作成相应的旋转轴,且最大旋转范围为±180°。不只是这样,还在这几个变位器中设置了与之相匹配的释放按钮。第二,焊机。站在焊机的立场出发来讲,其应用的最大电流为550A,并且除了安装相关操作板面以外,还安装了与之相匹配的启动开关,灵活使用这些开关可以显示当前的电压和电流。就面板的右边而言,其共有4个按钮,这些按钮在焊接材料、焊接方式选择等方面均发挥出了不容小觑的作用。不只是这样,在相应面板上还安装了一定数量的温度报警指示发光管。焊接电源在焊接结构中扮演着重要的角色,可以实现智能化目标,在无形当中满足了焊接要求。对于送丝机构的内部而言,其主要安装了以下构件:一是2个压丝轮;二是2个送丝轮,其中还包含2个带头数字压丝调整手柄。
2机器人系统应用情况
针对机器人系统来说,其可以在三维空间里面实现自由示教编程,其操作手段主要包含以下几种:一是RC方法;二是CC方法。而在使用焊接机械手期间,所适用的焊接参数是:焊丝型号CM-70、焊接速度1.2m/h,电压为23~28V。
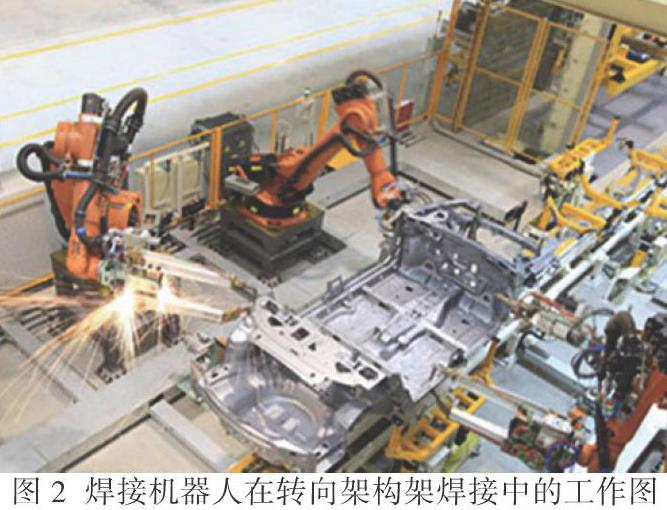
通常情况下,机器人系统应用流程主要包含以下几点,具体内容如图2所示。
首先,利用行车将侧架吊到焊接变位器上面,紧接着再借助于风缸对侧架所组成在焊接变位器夹具上做好相应的固定工作,然后详细检查侧架定位是否准确无误,直到满足既定标准之后才能发送焊接信号。其次,灵活运用焊接机械手,对左支撑座以及右支撑座做好相应的焊机处理工作,并将指定按钮启动,同时还要开启焊接变位器,紧接着对存在的焊缝进行规范焊接,确保所有焊缝都要进行二次焊接,第一次焊接应当完成焊角的4毫米;而第二次焊接应当完成焊角的8毫米。最后,需要松开夹具上的风缸,并借助于行车吊下已经焊接好的支撑座以及侧架。针对那些不满足要求的焊缝来说,一定要及时清除缺陷,并在此基础上做好补焊处理工作。
结语
充分利用焊接误差测量手段做好修整处理工作,可以更好地迎合焊接需求。对各种焊接缺陷所衍生出来的原因进行深度剖析,以便可以从中找到切实可行的解决方法。
参考文献
[1] 方孝钟,倪宝成,莫彦青.基于工位制的快速装配自动化焊接站[J]. 机械设计与制造工程. 2018(09)
[2] 任富明,渠源,张祥. IGM离线仿真编程系统在转向架构架焊接上的应用[J]. 电力机车与城轨车辆. 2018(03)
[3] 张建才.焊接机器人技术现状与发展趋势的研究[J]. 城市建设理论研究(电子版). 2018(23)
[4] 赵世通.智能焊接机器人的技术应用[J]. 黑龙江科学. 2019(02)
猜你喜欢
山东工业技术(2017年23期)2017-11-28
中国新技术新产品(2017年20期)2017-09-15
科学与财富(2017年24期)2017-09-06
教育教学论坛(2017年9期)2017-03-20
亚太教育(2016年31期)2016-12-12
企业文化·下旬刊(2016年4期)2016-04-28
机械制造文摘·焊接分册(2014年3期)2014-08-14