基于行车振动的路面平整度智能检测方法研究
2020-06-06 07:07张金喜王琳周同举吴洋
中外公路 2020年1期
张金喜,王琳,周同举,吴洋
(北京工业大学 交通工程北京市重点实验室,北京市 100124)
随着社会经济的飞速发展,中国道路交通网日趋完善,在公路新建里程增长逐渐缓慢的同时,公路养护里程所占比例逐年增加。据相关部门调查显示,截至2018年底,中国公路里程已达484.65万km,二级以上高等级公路达64.78万km,其中高速公路14.26万km;同年份公路养护里程475.78万km,约占公路总里程的98.2%。以上数据表明:道路养护与管理日渐成为道路交通行业的工作重点。
路面平整度是路面养护的重要参考指标之一,也是衡量路面质量及路面破坏程度的一个重要指标,与行车安全、行车舒适性及道路通行能力息息相关。国内外常用的平整度检测方法主要包括:3 m直尺法、连续式平整度仪测定法、车载式累积颠簸仪测定法、激光平整度仪测定方法等。目前的平整度测试方法大部分为直接测量法,传统的3 m直尺法检测精度较差,且需耗费大量的人力物力;其他方法利用不同测试仪器测定,标准化程度和自动化程度比较高,但测试成本较高,检测频率低(一般为一年一次),且测试过程对交通的顺畅运行有一定影响。因此,采用先进技术和方法实现平整度测试的智能化,是道路工程领域的研究热点之一。
国内外学者针对平整度检测方法进行了深入探究。马荣贵等设计了基于嵌入式IP2022的激光平整度检测系统,消除了检测速度对IRI检测结果的影响;杜豫川等基于功率谱密度分析方法,开发了包含多个加速度传感器和GPS的路面平整度检测系统;WY Huang等对3 m直尺法、连续式平整度仪及累积颠簸仪所测得的平整度均方误差进行对比分析,提出了适用于飞机跑道沥青路面的平整度评价方法;B Leben等研制了ZAG-VP纵向轮廓仪用于测量并计算路面平整度,其测量速度为120 km/h。可以看出:平整度检测受到了国内外学者的广泛关注,但在平整度的智能化检测方法研究和应用方面,尚未见成熟的成果。该文选用三轴向振动加速度采集仪采集行车过程中的振动信号,并利用小波消噪等方法对其进行预处理,提取特征值,基于GA-BP算法建立信号特征值与平整度之间的关系模型,探讨路面平整度的非接触、间接的智能化检测技术,为实现平整度智能化检测提供理论支持。
1 试验设备及方案
1.1 试验设备
振动加速度测试仪可用来测定三轴向的振动加速度信号,该文选用坐垫式三轴向加速度计来进行信号的采集。试验时,将其放置于乘坐在试验车辆上的被试者臀部下面,并固定于座椅上,将输出线连接到信号采集仪、信号调理器,构成人体全身测试系统,进行行车过程中振动信号的采集。加速度传感器采集的振动加速度,从背至胸的方向标记为Y轴方向,人体的脊背方向标记为Z方向,左右方向标记为X方向。
1.2 试验方案
(1) 试验道路选择
此次行车试验所选试验道路为北京市密云、通州等地区的普通沥青混凝土公路,共计22条。每个试验路段长度约为3 km,路线平顺、路面干燥,道路两侧景观基本一致,避免环境因素的干扰。所选择的道路详细情况见表1。对于不同的道路路段,进行了不同速度下的IRI检测,检测结果具有一定波动,反映了IRI检测结果与检测速度具有一定的关系。

表1 试验道路状况列表
(2) 试验车速
路面平整度是影响行车振动的主要因素之一,但相同平整度的路面,行车速度不同时车辆的振动也不相同。该研究中,在符合道路限速、保证行车安全的条件下,设定不同的驾驶速度,分别为30、50、70 km/h,开展不同驾驶速度情况下的振动加速度数据采集工作。车辆行驶速度尽量保持平稳,实际行驶速度与设定的控制速度的偏差小于4%。同时,为了验证研究结果的可靠性,还进行了基于驾驶员自主控制的变速行车试验。
(3) 试验车辆
不同车辆的振动性能不同,该研究主要进行利用振动信号检测路面平整度的理论研究,不考虑不同车辆的影响,因此根据实际情况,试验车辆选择北京吉普。车辆各部件及附属装置完好,轮胎气压符合相关技术规定,驾驶设施较为灵敏。试验中,将测试系统安装在试验车中,开展实际道路的行车试验。
(4) 试验人员
研究中,车辆驾驶员要求有3年以上驾龄,驾驶技术娴熟、稳重,身体健康,无不良嗜好。所选被试者为男性,年龄处于25~35岁,身体健康且无晕车现象。试验过程中将其双手自然地放置于大腿上,保持坐姿不变。
2 信号特征值分析
2.1 信号去噪
在已有研究基础上,参考国内外相关研究,选取Z轴单方向,即竖直方向的振动加速度数据进行分析及处理。车辆行驶过程中,路面状况的差异会产生随机噪声,车体自身发动机振动和行驶振动也会产生一定的噪声,车辆静止时,振动信号也会产生一定的波动,这些因素将会对所采集的数据产生一定的影响。因此,该文选用小波变换对所采集的试验数据进行消噪处理。
多分辨分析是小波变换的基本原理,即构造一组函数空间,把原始信号占据的总频带定义为空间V0,经第一级分解后V0被划分为两个子空间,即为低频的V1和高频的W1;经第二级分解后V1又被划分为低频的V2和高频的W2,以此类推,可得到如下等式:
V0=V1⨁W1=V2⨁W1⨁W2=Vm⨁Wm⨁…⨁Wj-1
(1)
基于上述原理,该研究应用Matlab中的小波变换工具箱,选取db4小波作为小波基,对信号进行4层分解,如图1所示;其中S为原始信号,a(n)为低频信号,d(n)为高频信号。基于软阈值函数,选取自适应阈值进行信号去噪,原始信号及消噪信号如图2所示。为检验消噪效果,随机抽取样本路段,将其信号残差进行正态分布检验,可得其峰度为0.016,偏度为0.129,基本符合正态分布,即消噪效果较好。

图1 小波分解示意图

图2 信号对比图
2.2 特征值提取
(1)|az|分位点
由于振动加速度的正负只代表方向,而与大小无关,故该研究考虑其绝对值变化规律。不同速度下振动加速度随IRI的变化箱形图如图3所示。由图3可知:当V=30 km/h时,随着IRI的增大,|az|整体呈上升趋势,其三分位点尤为显著,且不同平整度下,|az|变化范围较为相似;当V=50 km/h及70 km/h时,|az|三分位点仍呈上升趋势,但不同平整度下,|az|取值范围相差较大,规律性有一定下降。
(2) 信号有效值φx
信号有效值表示信号的平均能量,其计算方法见式(2):
(2)
式中:xt为t时刻的信号值。
将匀速行驶状态下的信号有效值进行汇总,其值随IRI变化趋势如图4所示。由图4可知:相同速度下,随着IRI的增大,φx呈上升趋势,具有很好的相关性;而相同平整度下,随着速度的增大,φx逐渐增大。
基于上述分析,利用SPSS软件对变速行驶状态下的IRI、|az|75%分位点、信号有效值φx及测试速度V进行偏相关分析,结果见表2。由表2可以看出:IRI与|az|75%、φx、V均呈现较好的相关关系,即以|az|75%、φx为特征值的振动信号,与路面平整度、行驶速度具有良好的相关性,验证了可以利用车辆行驶振动信号检测路面平整度的可行性。
3 平整度检测模型
3.1 GA-BP神经网络模型
传统BP神经网络算法在运行过程中,可能会出现计算收敛速度过慢,甚至产生局域最小值等问题,造成预测值与实际值间误差较大,无法满足模型精度要求。该文利用遗传算法对BP神经网络进行优化,将遗传算法的自适应性和全局寻优性与BP神经网络局部寻优相结合,以此提高模型的精准度。

图3 不同速度下|az|随IRI变化箱形图

图4 不同速度下φx随IRI变化散点图
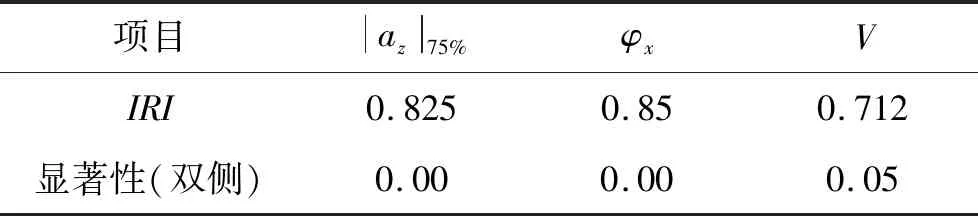
表2 IRI与其影响因素的偏相关分析(偏相关系数值)结果
基于上述分析,将速度、有效值φx及|az|75%值作为输入,IRI值作为输出,则隐含层神经元个数为7;将输入层到隐含层传递函数设定为双曲正切Sigmoid函数,而隐含层到输出层为对数Sigmoid函数。BP神经网络拓扑结构图如图5所示。

图5 BP神经网络拓扑结构示意图
为缩短染色体长度,该文采用实数编码,经计算可得其编码长度为36,将BP神经网络中权值、阈值按一定顺序级联,形成实数数组,作为一个染色体,依据此原理,设定初始化种群。

图6 GA-BP算法流程图
3.2 结果分析
由于BP神经网络中所输入的特征向量具有不同的量纲,为减弱其对网络模型的影响,需对数据进行归一化处理,计算公式如下:
(3)
式中:xi、X分别为转换前、后的值,xmax、xmin分别为样本的最大值和最小值。
此次试验共获取400个样本数据,选取其中200个样本作为训练集,利用其对模型的权值和阈值寻找最优。将剩余200组数据作为预测样本,对训练集数据进行验证,模型运行结果及其误差分析如图7、8所示。
图7、8表明:该文所建立模型的平均相对误差为3.65%,在允许范围内。该文所构建的GA-BP神经网络模型具有较高的精度,满足一般工程需要。
选取部分未经过训练的样本数据,将其分别输入到BP神经网络和GA-BP模型中进行平整度预测,结果如图9所示。

图7 GA-BP神经网络模型结果对比图

图8 GA-BP神经网络模型误差分析图

图9 训练误差对比图
由图9可知:经遗传算法优化的BP神经网络模型比传统BP神经网络精度提高了7.92%,其平整度预测更为准确,具有较高的可信度。
4 结论
针对利用行车振动信号检测路面平整度问题,通过对行车振动信号的分析,采用GA-BP算法,进行了路面平整度智能检测的探讨,得到以下主要结论:
(1) 利用三轴向振动加速度计,可以实时采集行车过程中的振动信号数据,通过采用小波变换等技术,可以得到符合要求的振动信号数据。
(2) 竖向Z轴振动加速度绝对值的三分位点|az|75%、信号的有效值φx及行车速度V与IRI之间具有较强的相关关系,模型的平均相对误差为3.65%。三分位点|az|75%、信号的有效值φx能够反映车辆振动特征,可作为检测路面平整度的有效振动信号指标。
(3) 利用遗传算法对传统BP神经网络进行优化的GA-BP神经网络模型,弥补了传统BP神经网络模型的不足,将模型精度提高了7.92%,使平整度预测精度得到一定提高。
平整度智能检测是当下道路领域的重点研究内容,在该文研究的基础上,可增加车辆类型、道路类型的样本量,以验证该文研究方法的普适性。此外,该文为平整度智能检测手段(如智能手机)的应用奠定了基础,具有重要的指导意义。
猜你喜欢
建材发展导向(2022年2期)2022-03-08
疯狂英语·新悦读(2019年11期)2019-12-18
建材发展导向(2019年11期)2019-08-24
建材发展导向(2019年10期)2019-08-24
筑路机械与施工机械化(2019年5期)2019-06-05
汽车与安全(2017年11期)2017-12-15
汽车与安全(2016年5期)2016-12-01
汽车维修与保养(2015年12期)2015-04-18
专用汽车(2015年4期)2015-03-01
现代企业(2015年4期)2015-02-28