基于STC89C52单片机的汽车倒车防撞警报系统
2020-06-11 09:26吕淑芳
电子技术与软件工程 2020年1期
文/吕淑芳
(山西农业大学信息学院 山西省晋中市 030800)
随着科学技术的迅猛发展,经济实力的不断增强,人民生活质量的不断提高,无论是个人用车,还是交通运输车辆的出行安全成为了人们最为关注的问题,尤其是倒车盲区造成的隐患,基于STC89C52 单片机的汽车倒车防撞警报系统应运而生。该系统的开发旨在帮助驾驶员在倒车过程中解决视角盲区的缺陷,提醒驾驶员泊车倒车过程中做出合理的操作,避免驾驶过程中发生不必要的意外和伤害,让整个泊车或倒车的过程更加的安全高效,从而提高驾驶的安全系数。
该系统利用灵敏的超声波传感检测设备及时准确的探测到汽车倒车过程中车尾周围的障碍物或行人,并立即反馈给车内微型处理系统——C52 单片机,单片机再通过精确的算法运算比较之后迅速做出判断,如果达到危险范围,系统将以语音灯光等信息及时提醒驾驶者以及周边的行人,给驾驶员留出充足的处理该情况的操作时间以达到减少交通事故发生概率的目的。
1 系统介绍
本文设计的汽车倒车防撞警报系统包括超声波模块、单片机模块、驱动模块、显示模块,实现了报警功能、避障功能、测距功能、显示功能。超声波测距模块会不停的向主控模块反馈实时的测量数据,而这些数据会反映在LED 显示模块中,使用户监控汽车与障碍物的距离,以减少倒车碰撞的可能。显示模块通过显示功能显示车尾与障碍物之间的距离数值并适时的发出警报声,当测量数值大于预设警报间距数值时,蜂鸣器会发出警报声以达到防止事故发生的目的。
2 系统硬件设计
本课题设计采用C52 单片机作为主控制器来实现倒车防撞预警系统的实现,为了防止汽车碰到前方或是左右方向的障碍物,在汽车的车头装载了超声波传感器,利用超声波测距的原理监测障碍物与汽车车尾之间的距离,当达到或超出预设间距警报数值时,蜂鸣器就会发警报声同时配以相应的图像信息提醒驾驶员的下一步行车操作。
系统总体的设计框图,如图1 所示。
2.1 车体设计
本系统使用两驱车模作为汽车的车体,车体设计采用车体前方两个普通车轮,车体后方则使用一个方向轮。车体前方的两个普通车轮使用两个电机分别驱动,这两个电机具有相同的力矩和转速,而后面的方向轮则是为了方便实现汽车的原地旋转。两个电机分别驱动车体前方的两个车轮进行反向旋转,从而带动后面的方向轮进行原地的直角甚至掉头动作。
2.2 主控制器模块设计
本系统使用STC89C52 单片机作为汽车的主要控制器。STC89C52 是一种低功耗、高性能CMOS8 位微控制器,具有8K字节系统可编程Flash 存储器。该单片机使用经典的MCS-51 内核,但是做了很多的改进使得芯片具有传统51 单片机不具备的功能。在单芯片上,拥有灵巧的8 位CPU 和在系统可编程Flash,使得STC89C52 为众多嵌入式控制应用系统提供高灵活、超有效的解决方案。
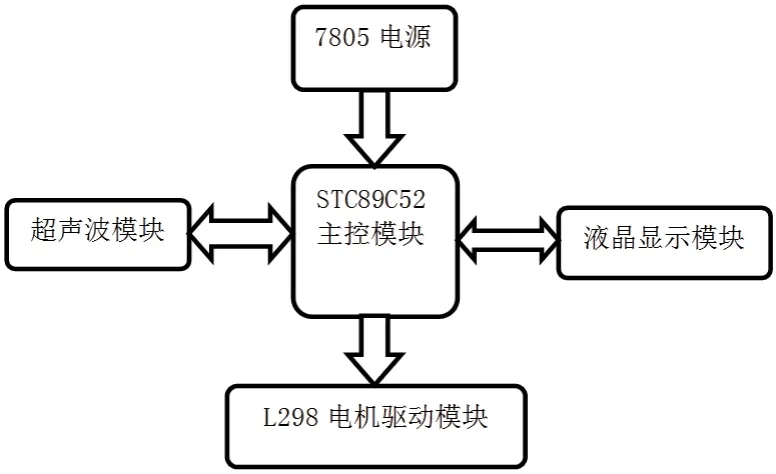
图1:系统总体设计框图

图2:主控电路图
本系统的主控电路图如图2 所示。
2.3 电源模块设计
综合考虑电流驱动能力、电压输出的稳定性、蓄电池体积的大小等因素,本系统使用每节1.5V 的6 节电池作为汽车的电源。经过汽车工作的反复验证,电压稳定符合系统要求。
2.4 电机驱动模块设计
考虑到电路设计按键开关对汽车速度的影响、响应时间的长短、可靠性、寿命等因素,本系统采用具有三极管功率放大器的直流电机,它是一种结构和原理都较为简单的达林顿管组成的H 型桥式电路,加速能力比较强。电路图如图3 所示。本系统使用L289N芯片作为电机驱动,这种芯片是一种高电压大电流的全桥芯片,一片即可控制两个电机。而且这种芯片比较普及,市场上有很多。用这个芯片作为电机驱动,不仅操作性好,稳定性能也颇为优良。
2.5 电机模块设计
汽车倒车防撞警报系统最主要的是实现避障功能,因此驱动汽车前进或是后退、转弯的驱动电机的选择就变得至关重要。考虑到输出力矩高低、转速的稳定性对汽车前进、后退、转弯的影响,本系统使用直流减速电机作为汽车的驱动电机。直流减速电机由于它内部具有高速电动机,可以给汽车提供原始动力,具有力矩较大,体积较小等优点。驱动电路图如图4 所示。
3 系统主要模块
3.1 超声波测距模块
对比分析了激光测距方式、红外线测距、毫米波测距、超声波测距,根据本系统开发的特点,选择了超声波测距。超声波测距方式相对于其他几种测距方式在短距离测距方面的优势是显而易见的,并且成本低廉,适应能力强。
超声波的传播速度比光速小很多,易实现信号的定向发射与接收,本系统汽车的超声波测距功能是由HC-RS04 超声波测距模块提供的,它能够完成2cm-400cm 内的监测功能。整个测距模块在调试之后可以实现3mm 左右的测量精度,从而实现避障功能。
在程序运行时,主程序先读出并处理HC-RS04 的测量的间距数值。当距离小于等于既定值时,汽车就会停止并转向再进行测距重复判断,直至距离大于既定值。当距离大于既定值时,汽车则会一直向前。
3.2 单片机模块
STC89C52 是一款价格实惠,各方面性能均衡的的单片机。由于C52 抗干扰、可编程、高速、低功耗等一系列的优点,适合本系统开发应用。
3.3 驱动模块
P0.0,P0.1,P0.2,P0.3 分别通过LG9110 机驱动来控制电机1 和电机2。通过电机的正转和反转来完成汽车的前进,停止。
3.4 显示模块
该显示模块主要由一个共阴极四位一体七段LED数码管构成,这七段数码管可以分别用a、b、c、d、e、f、g 和dp 来表示。他们相互连接用于接收C52 的P1 口发出的显示段码信号。在程序运行时,超声波测距模块会不停的向主控模块反馈实时的测量数据,而这些数据会反映在LED 显示模块中,使用户监控汽车与障碍物的距离,以减少倒车碰撞的可能。
4 系统实现
4.1 主程序
主程序初始化后,先调用显示子程序,判断汽车车尾周围是否有障碍物的存在,如果有障碍物存在,主程序则先读出并处理HCRS04 的测量的间距数值。判断测量数值与预设的警报间距数值大小,当测量数值大于预设警报间距数值时,蜂鸣器就会发出警报声以达到防止事故发生的目的。
4.2 显示数据子程序
该程序的作用是当发现有障碍物存在时,通过超声波模块进行测距,测量后的数值传送给C52 单片机处理,C52 运算完成之后,再把运算的数值显示在数码管上,供驾驶员实时观测并做出合理的倒车操作。
4.3 报警子程序
该程序的作用是通过显示子程序获得障碍物与车尾实际间距数值,该值大于预设警报间距值时,使蜂鸣器发出警报,做出的合理的判断操作,提醒汽车周围的行人,或者提醒驾驶员,以便驾驶员有足够的反应调整时间,从而达到避免事故发生的目的。
4.4 按键子程序
按键子程序的作用是使有效间距可调节,驾驶员可根据自己的需求调整自己需要的报警距离,按键首次被按下时为调整上限,按键连续二次按下是用于调整下限,连续按下三次功能退出。
5 结束语
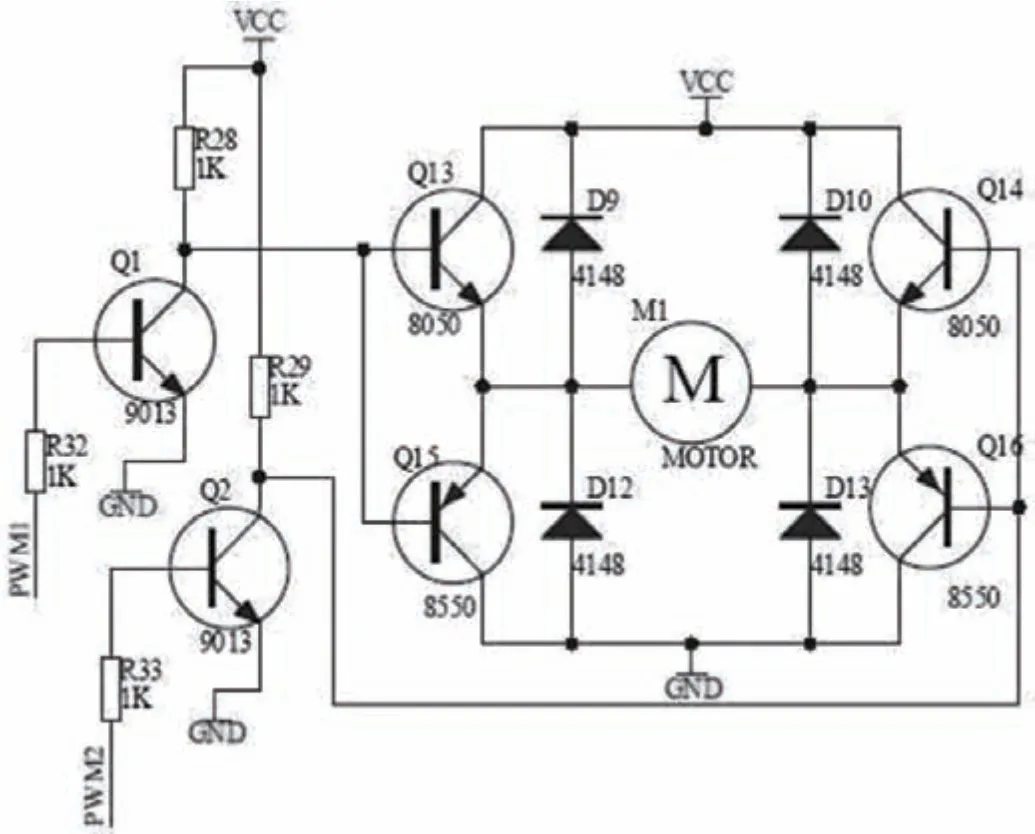
图3:H 桥式电路图
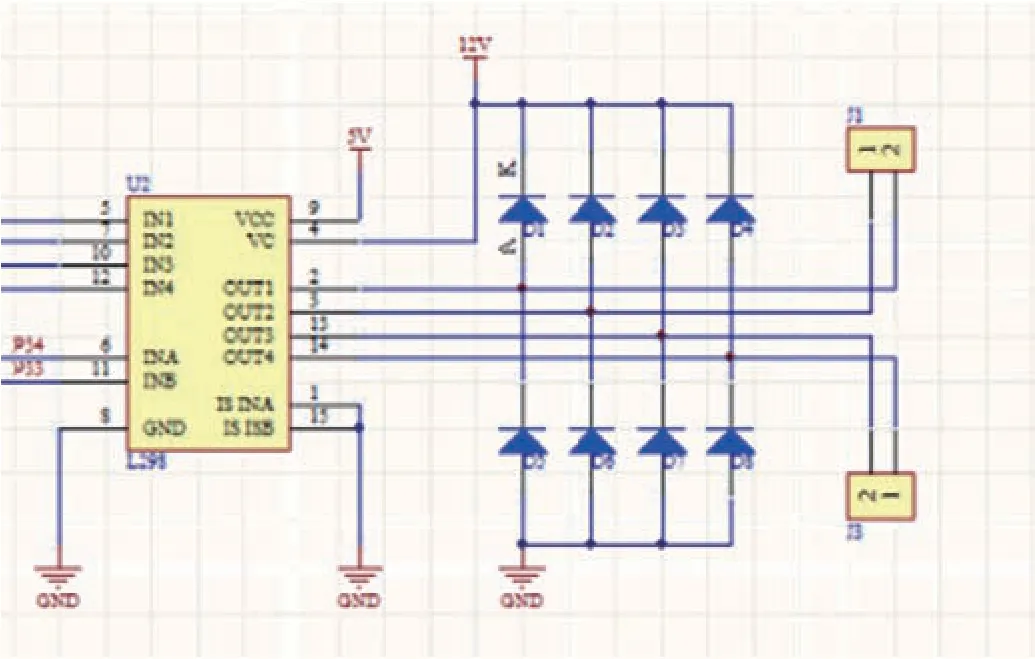
图4:驱动电路图
基于STC89C52 单片机的汽车倒车防撞警报系统将嵌入式应用技术与物联网理论相结合,利用灵敏的超声波传感检测设备及时准确的探测到汽车倒车过程中车尾周围的障碍物或行人,并立即反馈给车内微型处理系统——C52 单片机,单片机再通过精确的算法运算比较之后迅速做出判断,如果达到危险范围,系统将以语音灯光等信息及时提醒驾驶者以及周边的行人,给驾驶员留出充足的处理该情况的操作时间,大大降低了交通事故发生概率,为人们的安全出行保驾护航。
猜你喜欢
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
科学(2020年3期)2020-01-06
电子制作(2018年17期)2018-09-28
电子制作(2017年7期)2017-06-05
军事文摘·科学少年(2016年7期)2016-09-20
电子制作(2016年21期)2016-05-17
水利科技与经济(2016年4期)2016-04-22
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10