扭转角测量系统中焦距误差分析
2020-06-16 01:41杨文昌王志乾宋卓达李勤文
应用光学 2020年3期
杨文昌,王志乾,宋卓达,杜 闻,李勤文
(1. 中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2. 中国科学院大学,北京 100049)
引言
在工程实际中,例如航天测量船在海上运行时,处于同一基座的各测量设备之间在外力作用下总会产生三维相对角变形,分别为俯仰角(pitch)、方位角(yaw)、扭转角(roll),最终会影响船载测量设备的测量精度[1-2]。其中扭转角是指绕梁设备自身连线的角度变化,相对其他两维角度测量难度要大得多,对于扭转角的测量具有重要的意义[3-4]。扭转变形目前存在多种测量方法。在这些方法中,光学测量方法是一种测量准确度、灵敏度非常高的非接触测量方法,并得到了广泛的应用[5]。利用双光栅叠加生成的莫尔条纹,因为其能够有效放大各种位移变化,可以大幅度提高设备变形的测量精度,现已被广泛应用于角度和长度等物理量的测量中[6-7]。文献[8-9]提出将莫尔条纹应用于扭转变形的测量中,并取得了很高的测量精度。
中长焦距的光学透镜和光学系统是天文望远镜、空间光学系统等装置中广泛使用的光学器件,由于此类元件焦距长,加工装调难度大,使得不同光学系统之间的焦距值通常难以保持一致[10-12]。要实现扭转角的非接触测量,通常需要将2 个测量光栅放置于2 个自准直光学系统的焦面上,并且理想情况下两光管焦距应该保持一致。因为焦距误差导致莫尔条纹成像与理论公式存在偏差,从而给扭转角的测量引入了误差,所以需要从理论层面上进行系统校正。
本文针对莫尔条纹测量扭转变形方案,分析了光学系统焦距误差对于扭转角测量精度的影响。
1 理论模型
1.1 扭转角测量原理
测量模型原理如图1 所示,光源、光栅1 固连在同轴上,设备发生扭转变形时带动光栅1 绕z 轴实现同步转动。光线通过光学系统1 后形成准直条纹光束,并且理想情况下2 个光学系统的焦距相同,因此利用此光路可完成扭转变形的非接触测量,从而增加测量距离[13-14]。最终经过光栅1 和光栅2 形成的莫尔条纹图像被CCD 接收。
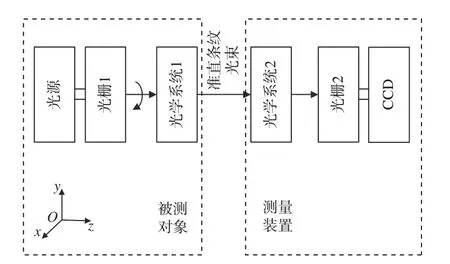
图 1 测量原理图Fig. 1 Principal diagram of torsion angle measurement
扭转角非接触测量是通过双光栅干涉产生的莫尔条纹来构建理论模型的[15-16]。建立如图2 所示直角坐标系,假设有2 块黑白型长光栅尺,光栅面相互平行,光栅栅线间距分别为d1和d2,取光栅常数为d1的光栅G1 的任一栅线为y 轴,与其垂直的方向取为x 轴。那么两光栅栅线夹角为θ,莫尔条纹之间距离为W,以此坐标系求取光栅叠合后的莫尔条纹方程。
通过图2,根据平面几何原理可以推导出莫尔条纹的宽度公式:


图 2 两光栅叠加产生的莫尔条纹坐标系Fig. 2 Moiré fringe coordinate system generated by two gratings superposition
在实际工程中,通常采用栅线间距d 相同的2 个光栅,以上公式可简化为

由公式(2)可得光栅夹角的表达式如下所示:

由(3)式可知,只要求得莫尔条纹的宽度W 就可求得两光栅的夹角θ,只要求得莫尔条纹的宽度W 变化,就可求得两光栅的夹角θ 的变化。因此在用双光栅产生的莫尔条纹进行扭转角的测量时,设备间的扭转变形带动光栅转动,根据莫尔条纹的间距变化,即可求解扭转角。
1.2 光学系统焦距与扭转角关系模型
取2 个光学系统焦距分别为f1、f2(其中f1>f2),则两焦距差异对光栅栅距的缩放作用σd可用下式表示:

将公式(4)带入公式(1)可得带有焦距的莫尔条纹宽度关系式:

则此时不同扭转角度下对应的扭转角为

通过公式(6)得出,由于受到2 个光学系统不同的焦距f1、f2的影响,扭转角与莫尔条纹宽度之间关系式发生改变,对扭转角的测量精度造成了影响。
对比公式(3)和(7)可得在不同光栅夹角下对应的扭转角误差为Δθ:

2 仿真分析
取2 个光学系统焦距差异分别为0.5%、1.0%、2.0%,2 个光栅栅距同为70 μm,利用公式(7)计算得到在不同光栅夹角下的扭转角误差曲线如图3所示。可以看出当光学系统焦距存在差异时,在不同光栅夹角下计算所得各扭转角要大于理想情况(焦距误差为零)下的真实值,也即说明随着焦距差异的增大,莫尔条纹的宽度变化要相对缓慢一些。在2 个光学系统焦距误差为0.5%时,扭转角测量误差整体小于0.05°,而当焦距误差增大至2%时,扭转角的测量误差平均增大近10 倍。说明扭转角误差随焦距误差呈现非线性变化,对测量精度影响较大。同时在同一变化曲线中,光栅夹角的测量误差随着光栅夹角的增大先减小后缓慢增大。理论模型误差在1°~3°范围内变化尤为明显,说明在小角度下焦距误差对于扭转角测量精度影响较大。
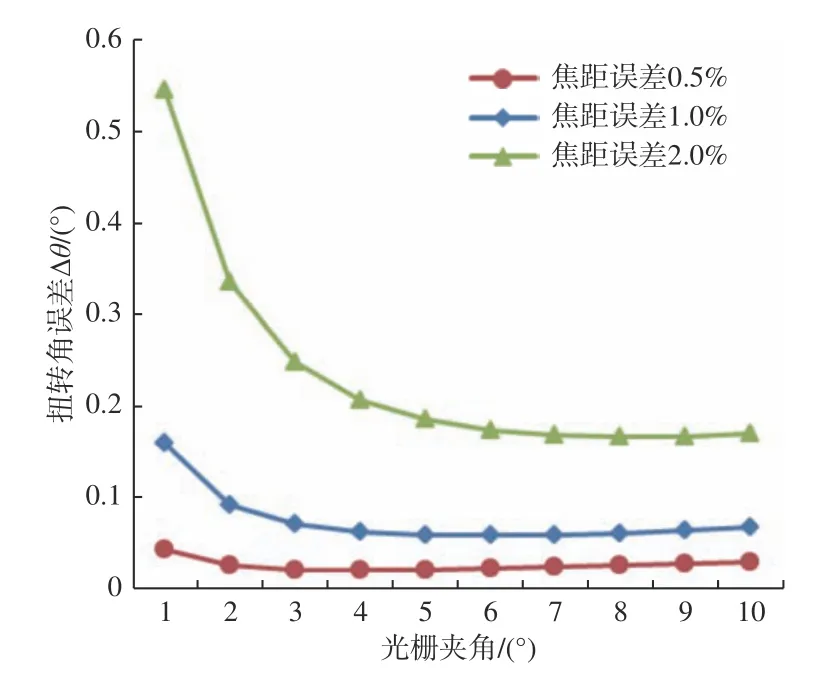
图 3 扭转角与焦距误差关系曲线Fig. 3 Torsion angle and focal length error curve
3 实验验证
3.1 实验装置介绍
图4 为设计的仿真实验装置,主要设备有:红色发光二极管作为光源,光学系统1 的焦距为1 325 mm,光学系统2 的焦距为1 295 mm,2 个矩形测量光栅栅距同为70 μm,分辨率(pixel)为1 999 ×2 000、像元尺寸为4.8 μm×4.8 μm 的面阵CCD 以及图像采集装置,轴角编码器采用的是海德汉MRP5080,测量精度优于2.5″。图5 为采集获得的莫尔条纹图像。

图 4 实验设备布局Fig. 4 Experimental equipment layout

图 5 采集得到的莫尔条纹图像Fig. 5 Captured Moiré fringe image
整个装置的操作原理如下:控制旋转机构转动,模拟扭转变形,同时带动光栅1 和轴角编码器发生转动,通过轴角编码器可以获得光栅1 发生的转动角度。2 个自准直光学系统焦距存在差异,在像面处形成大小不同的光栅像。在不同角度下,叠加在CCD 上的莫尔条纹图像发生变化,然后从零位开始每隔1°采集对应图像,并将编码器转动的角度作为真值,计算焦距在不同光栅夹角下存在的误差。
3.2 实验结果分析
表1 是将编码器转动角度作为真值,光栅夹角在1°~10°范围内进行测量的结果。可以看出2 个光学系统的焦距差异使得扭转角的整体测量误差较大,在1°~3°的小角度范围内这种现象尤为明显。在光栅夹角为1°时测量误差达到最大值,测量精度下降了67%。因此在利用莫尔条纹测量扭转变形时,2 个光学系统的焦距误差会严重影响扭转变形的测量精度。

表 1 实验结果Table 1 Experimental results
4 结论
本文建立了光学系统焦距对扭转角测量精度影响的理论模型,通过分析得出在非接触测量时光学系统焦距误差使得莫尔条纹成像规律发生改变,从而影响了扭转变形的测量精度。通过实验获取的计算结果,扭转角最大测量误差达到0.67°。与理论仿真相对照,证明了光学系统焦距对扭转角测量精度,尤其是在小角度下有着较大影响。因此在利用莫尔条纹进行扭转变形测量时,应对光学系统焦距进行精确测量,并进行相应补偿,从而将光学系统焦距误差控制在合理目标范围内。
猜你喜欢
红领巾·萌芽(2022年3期)2022-03-13
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
摄影与摄像(2021年12期)2021-10-01
花火·绘阅读(2021年8期)2021-09-05
艺术品鉴(2021年21期)2021-08-15
哈尔滨轴承(2020年2期)2020-11-06
锦绣·上旬刊(2020年3期)2020-06-08
童话世界(2019年28期)2019-11-23
美与时代·城市版(2016年12期)2017-04-26
探测与控制学报(2015年4期)2015-12-15