光场多光谱相机像方远心镜头光学设计
2020-06-16 01:41张文喜
应用光学 2020年3期
刘 博,刘 钧,高 明,李 杨,张文喜
(1. 西安工业大学 光电工程学院,陕西 西安 710021;2. 中国科学院光电研究院 中科院计算光学成像技术重点实验室,北京 100094)
引言
光学成像遥感技术以全新的方式让人们感知目标的特征,现已成为获取目标众多信息最为常用的方式,被广泛应用于生态环境监测、军事侦察等领域[1]。光学成像遥感方式包括:可见光成像、光谱成像[2]和偏振成像[3]等。从光学遥感的发展趋势来看,光谱成像将成为光学成像领域强有力的辅助技术。光谱成像技术的类型包括:滤光片型[4]、光栅衍射型[5]、棱镜色散型[6]和干涉型[7]等。滤光片型是在成像光路的特殊位置添加多光谱分光滤光片阵列,通过光谱范围获取目标不同波段的光谱信息。光场成像技术可以在一次曝光中记录物空间的光场信息,1936 年,Gershun 首次提出光场的概念,定义光场为光辐射在空间不同位置、不同方向上的传播[8-9]。1991 年,Adelson等人提出利用七维函数表征光场,称为全光函数[10]。之后众多学者对光场的定义进行了不同程度上的简化与表征,1996 年,Levoy 等人提出在某一时刻下,同时忽略光辐射沿着光线传播路径上的能量衰减,利用光线和两个平行平面的交点来表征光场,将光场简化为一个四维函数[11]。
光场多光谱成像光学系统由多光谱分光滤光片阵列、主透镜成像系统和微透镜阵列组成。在主透镜光学系统入瞳位置添加多光谱分光滤光片阵列,实现主透镜光学系统孔径的分割;微透镜阵列置于主透镜光学系统的像方焦面位置,每个微透镜阵列子单元记录光线对应相同位置不同视角的场景图像,从而构成光场多光谱成像光学系统[12-13]。本文根据多光谱成像原理,设计了一款专门应用于微透镜阵列型光场多光谱成像的像方远心光学系统,该光学系统均未采用特殊面型,从而降低了加工成本。
1 光场多光谱成像
如图1 所示,在传统光学成像系统像面附近放置微透镜阵列,将面阵探测器置于微透镜阵列焦面位置处,即构成光场成像系统[14]。设目标平面为(X0,Y0),为方便分析将主透镜系统简化为理想透镜,定义主透镜系统入瞳平面为 (U,V),微透镜阵列平面为 (S,T) ,探测器平面为 (Xd,Yd),物点到主透镜镜面距离为L,主透镜焦距f1,微透镜焦距f2。主透镜入瞳子孔径坐标为 (u,v)、微透镜阵列子单元坐标为 (s,t) 、微透镜 (s,t) 下的像素为 (xd,yd)。

图 1 光场成像系统示意图Fig. 1 Schematic diagram of optical field imaging system
图中物点 O1(xo,yo)发出的光束经主透镜会聚于微透镜 (s,t)处,在探测器面上形成光斑,光斑面积对应微透镜 (s,t)的尺寸。在光场成像系统中主透镜系统使目标平面 (X0,Y0)与微透镜阵列平面(S,T)共轭成像,微透镜使主透镜系统入瞳平面(U,V)与 面阵探测器平面 (Xd,Yd)共轭成像,因此在探测器面上对应的是主透镜入瞳孔径的像,所以各像元输出的灰度值 I(xd,yd)j(s,t)是对应物点O1(xo,yo)通过不同子孔径、不同方向视角的辐射L(u,v)j(x0,y0)。 微 透 镜 (s,t) 下 的 像 素 (xd,yd)是 对 应 目标经过子孔径 (u,v)的投影,四维光场有如下对应关系式[15]:

微透镜阵列排列方式如图2 所示。光轴通过某微透镜中心时微透镜阵列面处的坐标 (s,t)对应微透镜中心坐标为 (so,to):
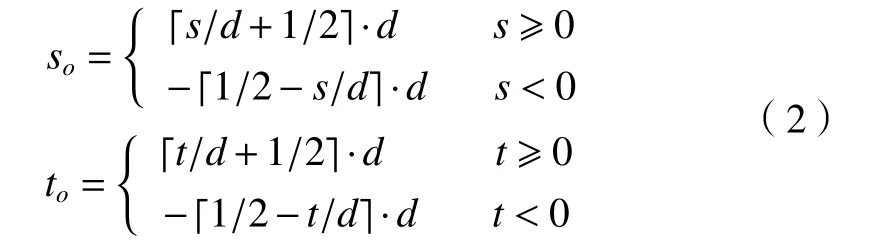
式 中 ⌈⌉为向下取整符号。

图 2 微透镜阵列面排布示意图Fig. 2 Schematic diagram of microlens array surface arrangement
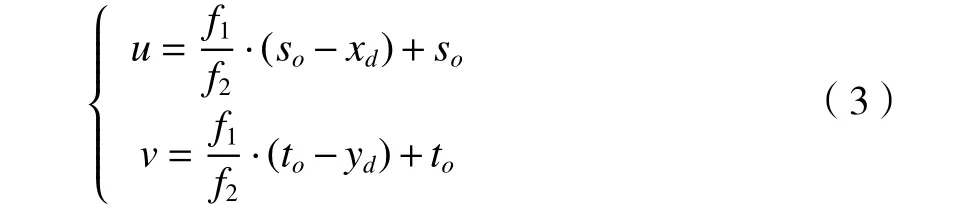
主透镜面和探测器面关于微透镜互为共轭成像面,则微透镜中心坐标 (so,to)、探测器面坐标(xd,yd)与 主透镜面坐标 (u,v)之间存在如下关系:
设主透镜口径为D,且光轴通过主镜面中心,有如下采样函数[15]:

在实际成像系统中,假设探测器像元大小为p,探测器面像元 (m,n)的 中心坐标为 (xdm,ydn)。则探测器面坐标 (xd,yd)与 像元中心坐标 (xdm,ydn)存在如下关系式:

探测器像元坐标为 (m,n),最终探测器像元(m,n)处的响应可以表示为

式中 H(xd,yd)为探测器空间采样函数。
多光谱分光滤光片阵列如图3 所示。通过对物点发出的不同方向光辐射进行光谱通道分光,实现入瞳子孔径与光谱分光通道的转换,结合光场成像原理构成光场多光谱成像光学系统[16],如图4 所示。

图 3 多光谱滤光片阵列示意图Fig. 3 Schematic diagram of multispectral filter array

图 4 光场多光谱成像示意图Fig. 4 Schematic diagram of optical field multispectral imaging
定义多光谱分光滤光片特性函数 Tλ(u,v)为滤光片在波长λ 处的光谱透过率[15]。设任意一物点(xo,yo)的辐射传输到孔径(u,v)处的光场为L(u,v,xo,yo),则经过对应孔径处滤光片滤波后的光场为

由于微透镜面和物面关于主透镜互为共轭成像面,根据高斯成像关系,物点 (xo,yo)经主透镜投影在微透镜阵列面的坐标 (s,t)为

因此有:

根据采样定理可得探测器像元( m,n)处的响应为

依据(9)式和(10)式可知,对应孔径的光谱分光特性函数 Tλ(u,v)与 孔径坐标 (u,v)相关,探测器空间采样函数 H(xd,yd)限定了该像元所接收光场的孔径范围,不同孔径处出射的光场被不同的分光特性函数滤波,同时投影在探测器像元的不同位置,从而实现光谱信息的分离和采集。
2 光学系统设计
光场多光谱成像系统中,主透镜的一次像面位置处放置微透镜阵列。为了使不同视场子孔径主光线都能垂直入射微透镜单元,系统采用像方远心光学系统设计(如图5 所示),以避免不同视场子孔径主光线到达探测器像元与微透镜单元中心偏离,造成光谱重构误差,如图6 所示。像方远心光学系统是将孔径光阑置于物方焦平面附近,使得像方主光线会聚到像方无限远处[17]。考虑到光谱范围以及帧频等需求,最终选定探测器为OnSemi PYTHON 25k CMOS 图像传感器,像素为5 120×5 120 pixel,像素尺寸4.5 μm×4.5 μm。

图 5 像方远心设计方案Fig. 5 Design of image telecentric system
2.1 系统设计参数
根据系统应用指标要求,系统设计焦距为240 mm,F 数为4,工作波段400 nm~1 000 nm。像方远心度最大视场不高于0.05°。根据探测器横纵像素尺寸以及最小像元尺寸计算可得光学系统对角线尺寸为

图 6 非像方远心设计方案Fig. 6 Design of non-image telecentric system

式中:M、N 分别表示探测器横纵像素数;d 为最小像元尺寸。
由(11)式可以计算得到像面对角线约为32.58 mm。最终确定光学系统主要设计指标如表1 所示。

表 1 光学设计指标Table 1 Optical design specifications
根据探测器奈奎斯特频率Nn的计算方法可得:

最终取110 lp/mm 作为评价光学系统光学传递函数的最大参考空间截止频率。
2.2 初始结构搭建
为了更好地匹配光阑的最佳位置,将光阑前置,利用更多的自由度匹配出瞳位置,在双高斯结构的基础上将光阑前置进行优化设计。在系统最前端插入5 mm 厚的蓝宝石平板玻璃代替光谱滤光片阵列元件,距离第一片透镜最小距离为1 mm,保证满足安装多光谱滤光片的结构要求。由于系统设计要求波段较宽,所选结构不能更好地校正色差,为降低成本不采取添加特殊面型,利用材料阿贝常数相差较大的正负透镜组合校正色差,选择添加两组双胶合透镜构建新的初始结构,使系统结构可以满足色差校正要求。
系统初始结构二维视图如图7 所示,系统参数如表2 所示。从表2 可以看出,第4 组双胶合透镜组镜片厚度较大不利于胶合面胶合。表3 列出初始结构像差,系统像差主要有:球差、彗差、场曲、位置色差和垂轴色差。表4 列出了初始结构各视场像方远心度。从表4 可以看出,像方远心度较大,不满足设计要求。

图 7 光学系统初始结构Fig. 7 Initial structure of optical system

表 2 系统参数Table 2 System parameters

表 3 初始结构像差Table 3 Aberration of initial structure

表 4 各视场像方远心度Table 4 Image telecentricity of each field of view
光学系统光谱范围较宽需要校正二级光谱,双胶合系统中二级光谱初级量[18]可表示为

式中:P 为材料色散系数;V 为材料阿贝数。分别表示为

根据(13)式和(14)式可知,在焦距一定的光学系统中,二级光谱色差与系统结构参数无关,完全取决于玻璃的材料特性,所以要选取阿贝数相差较大,色散系数相近的玻璃组合来校正二级光谱[19]。下一步优化过程将以调整系统相关镜片厚度,控制系统像方远心度,校正部分光线球差与位置色差为主。在优化系统镜片厚度、空气间隔时适量进行调整,使系统结构稳定,同时着重平衡操作数权重,提高优化效率。
2.3 设计结果
优化完成后最终系统由多光谱滤光片阵列,两片单透镜,四组双胶合透镜组成。二维视图如图8所示,系统整体渲染图如图9 所示。

图 8 系统结构视图Fig. 8 System structure view
3 像质评价

图 9 系统渲染图Fig. 9 System rendering graph
光学系统评价指标主要有传递函数曲线和点列图。传递函数是综合评价光学系统成像质量好坏的重要指标,点列图可以衡量光学系统像面光能量分布的均匀性。系统MTF 曲线如图10 所示。从图10 可知,奈奎斯特频率110 lp/mm 处全视场MTF 均不小于0.53,接近衍射极限,成像质量良好。点列图如图11 所示,各视场点列斑分布均匀,大部分在艾利环内。系统色差曲线图如图12所示,色差曲线均在衍射极限内。畸变大小分布曲线如图13 所示,可以看出系统畸变大小在0.1以内。衍射能量集中度曲线如图14所示,可以看出系统能量集中度较高,成像到微透镜阵列子透镜孔径上的能量分布均匀。
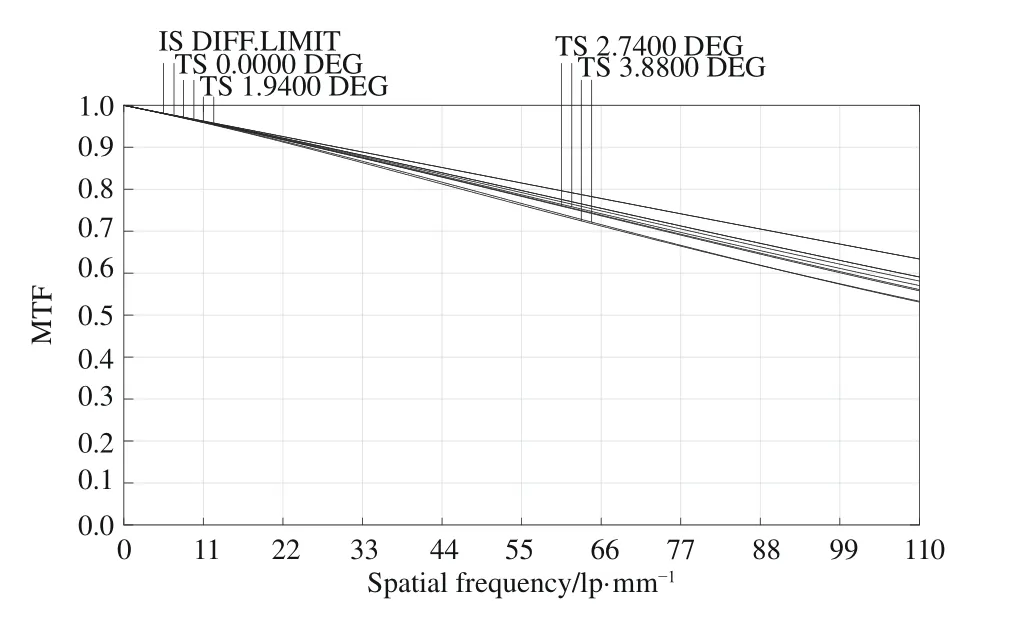
图 10 MTF 曲线Fig. 10 MTF curves
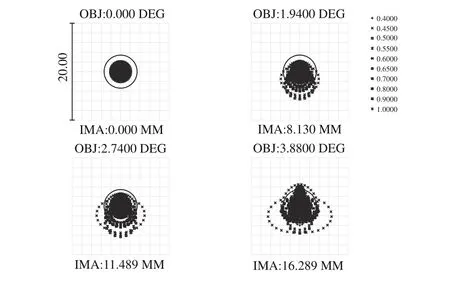
图 11 点列图Fig. 11 Spot diagram

图 12 色差曲线图Fig. 12 Color difference curves
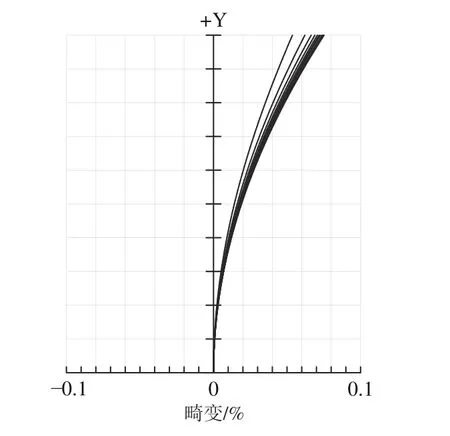
图 13 畸变视图Fig. 13 Distortion view
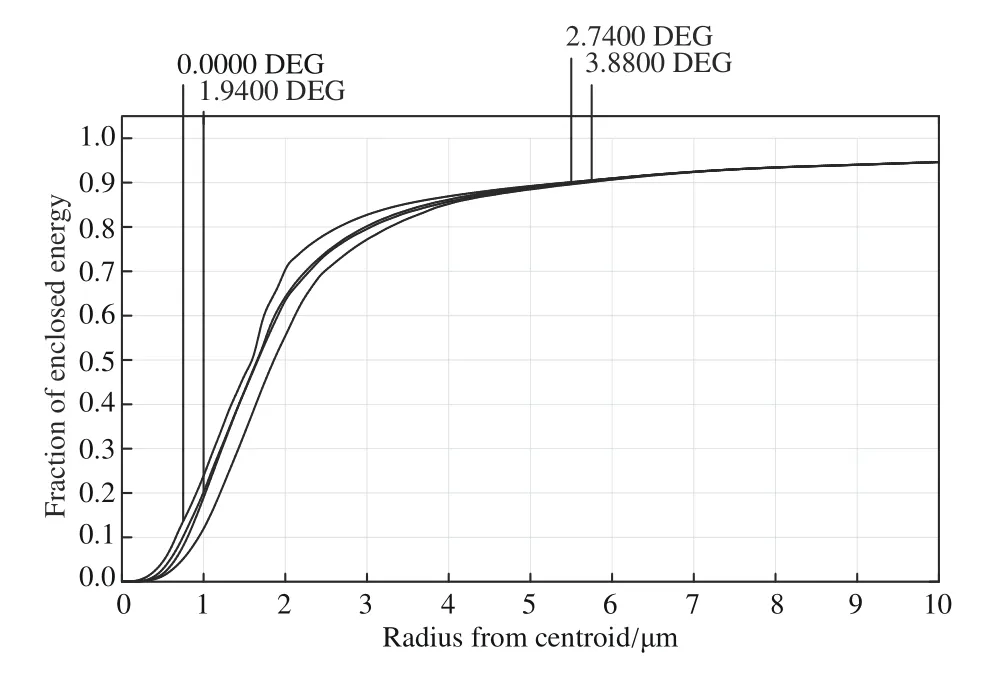
图 14 衍射能量集中度曲线Fig. 14 Diffraction energy concentration degree curves
各视场像方远心度满足设计要求,最大视场主光线与像面法线夹角为0.027°,详细结果如表5 所示。
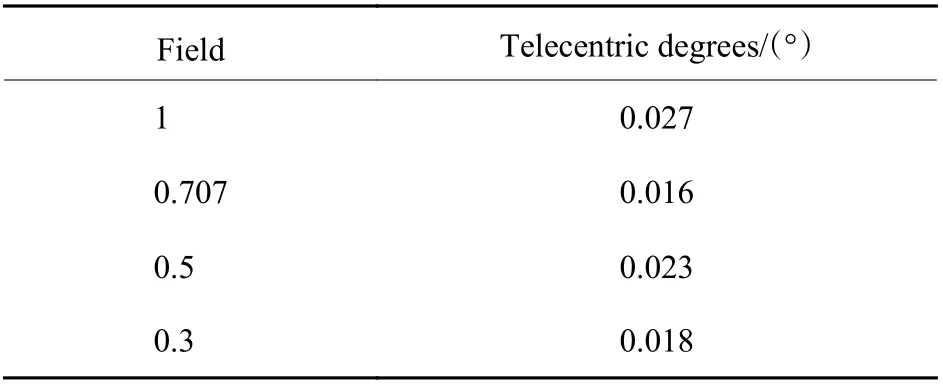
表 5 各视场像方远心度Table 5 Image telecentricity of each field of view
4 成像质量公差分析
光学镜片加工以及光学系统装调时存在各种不良因素,包括:面型、厚度、空气间隔以及元件的偏心和倾斜等误差。误差过大将会严重影响系统的成像性能,所以一个合理的设计必须按照目前的加工工艺和装调水平对光学系统进行公差分析,在合理公差范围内使系统成像质量达到最佳。
为降低光学系统的加工成本,首先对设计的系统半径进行规划即套样板,以减小特制工装和夹具的费用。公差分析评价准则主要有RMS spot radius 法、RMS wavefront 法 和Diff MTF 法。Diff MTF 法是一种全面的像质评价方法,考察其MTF曲线的下降量。根据实际的工程经验保证系统在公差容限内,系统传递函数全视场在110 lp/mm 处大于0.2。
结合工程设计经验,首先进行初始公差分配,表6 给出具体初始公差分配数值。
表6 中TFRN 为面型光圈公差,TTHI 为厚度或位置公差,TSDX、TIRX 分别为表面偏心与表面倾斜公差,TEDX、TETX 分别为元件偏心与元件倾斜公差,TIRR 为表面不规则度公差。
利用Zemax 软件进行公差分析,设置系统焦平面到最后一个透镜后表面的距离为补偿量,分析系统MTF 分布,如图15 所示。在初始分配差容限下,系统MTF 曲线下降量较大,表明系统的成像质量较差。
根据公差分析结果对影响较大的面型、厚度以及元件的倾斜进行重新分配,如表7 所示,其余公差按照初始公差分配。收紧公差后,再次进行Monte-Carlo 分析,得到光学系统MTF 变化曲线如图16 所示。MTF 最差下降到0.05,具体传递函数分布概率如表8 所示。在重新分配的公差容限下,90%以上系统MTF 曲线截止频率在110 lp/mm 处高于0.28,50% 以上系统MTF 曲线截止频率在110 lp/mm 处高于0.34。此公差分配符合目前的实际加工水平,同时系统参数与成像质量满足设计以及实际使用要求。

表 6 元件/装配公差分配表Table 6 Distribution of component/assembly tolerances
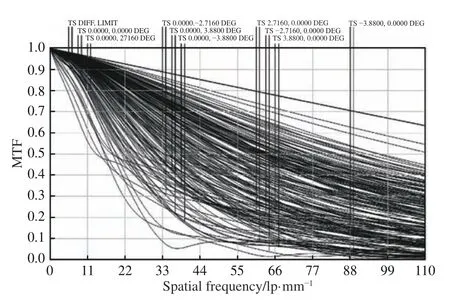
图 15 MTF 曲线Fig. 15 MTF curves

图 16 MTF 曲线Fig. 16 MTF curves

表 7 收紧公差分配Table 7 Distribution of tighten tolerance

表 8 MTF 概率分布Table 8 Distribution of MTF probability
5 结论
本文设计了一款应用于光场多光谱相机的像方远心镜头光学系统。光学系统采用多光谱滤光片阵列进行入瞳孔径的分割,可以在一次曝光中快速地获取目标的光谱信息。系统由一个多光谱滤光片阵列、4 组双胶合透镜和两片单透镜组成,均未使用特殊面型,很大程度上降低了加工成本。像质评价以及成像质量公差分析结果表明:光学系统MTF 值全视场在110 lp/mm 处高于0.28,成像质量良好,同时满足加工以及实际使用要求,将在光场多光谱成像系统中具有重要的应用价值。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
电子与信息学报(2022年5期)2022-05-31
科学技术创新(2021年25期)2021-09-11
科学(2020年5期)2020-01-05
中国军转民(2019年11期)2019-09-10
中国医疗设备(2019年1期)2019-01-15
兵器装备工程学报(2016年9期)2016-10-20
浙江大学学报(工学版)(2015年1期)2015-03-01
摄影之友(2014年3期)2014-04-21
天文研究与技术(2013年4期)2013-12-18