
空中加油最佳对接初始偏差位置
2020-06-23 10:26吕旭飞郝毓雅姚尚宏张志强
科学技术与工程 2020年14期
吕旭飞, 任 伟, 郝毓雅, 姚尚宏, 张志强
(中国飞行试验研究院发动机所,西安 710089)
空中加油系统分为硬式加油和软式加油,其中软式空中加油由于实现简单、成本低,能够同时对多架受油机进行加油等特点而被广泛应用。特别是随着无人自主空中加油的兴起,软式空中加油对接阶段的建模、控制、决策研究越发得到重视[1-2]。
软式空中加油的实施过程分为会合、编队、对接、加油、解散5个阶段。在对接阶段,由于受油机不断靠近,处于稳定状态的锥套在受油机头波作用下[3-4],出现规律性“远离-回摆”的单摆式运动[5],导致对接不确定性大大增强[6]。目前有人机的策略大致为:随着受油机靠近锥套,飞行员根据自身经验不断调整飞机姿态以获得最佳前进方向,在受油机运动至距离锥套3 m以内时,脉冲操作受油机油门杆,在保证安全的前提下,使受油机获得有限的加速从而“快速接近”[7],在锥套产生明显位移前完成对接。这种策略要求受油机驾驶员经验丰富,因此往往需要大量的对接练习,而且很难直接移植到无人自主空中加油中。因此,为了提高软式空中加油对接成功率,中外学者进行了很多头波影响方面的研究。
Khan等[8]利用计算流体动力学(computational fluid dynamics, CFD)分析了“骁龙”战机的头波影响范围,并针对其特征制定了对接过程中减弱头波影响的受油机进近策略,但CFD方法的局限使得结论没有普适性,也不能进行受油机控制律设计;Ujjar等[9]通过搭建软式空中加油仿真系统,研究了考虑大气紊流条件的头波对软式空中加油对接的影响,但没有给出具体的受油机对接进近策略。在试验方面,NASA德莱顿中心通过F-18飞行试验数据详细分析了受油机头波的影响范围及锥套摆动的最大位移[10]。王健等[11]利用CFD方法分析了F-16飞机头波在不同高度速度下影响范围及变化规律;王海涛等[12]利用数学方法建立了F-16受油机头波模型,并对比了模型计算结果与试验结果的差别,取得了较好的效果。综上所述,在仿真和试验中对于受油机头波的研究比较深入,针对受油机头波对锥套影响的研究中,没有提出明确的受油机对接进近策略。
建立软管锥套的6自由度模型和受油机头波模型[13-14],为了突出受油机头波对锥套的影响,忽略了加油机尾流,认为软管-锥套只受自由流作用。研究不同对接速度下锥套的运动特征,据此给出成功对接时受油机最佳初始偏差位置和对对接速度不敏感区域,并最终形成对接策略。
1 数值方法介绍
数值方法分为软管-锥套模型和受油机头波模型两部分。
1.1 软管-锥套建模
1.1.1 建模假设及坐标系定义
假设软管是由有限数量的光滑圆柱形刚性连杆组成,连杆之间通过无摩擦的球窝连接。连杆的质量以及载荷集中在连接处。空中加油过程中,加油机做匀速直线飞行。
加油机机体坐标系Sk:原点Ok取在软管拖曳点处,坐标系和加油机固连;x轴在加油机对称面内且平行于加油机的轴线指向机头;y轴垂直于加油机的对称面朝向机身右方;z轴在加油机对称面内,与x轴垂直朝向机身下方。坐标如图1所示。

图1 软管-锥套在加油机机体坐标系下的示意图Fig.1 Demonstration for horse model and coordinates
1.1.2 软管段运动分析

图2 质点K的受力分析示意图Fig.2 Force analysis for K
质点K受力如图2所示。质点K的加速度可表示为
aK=(QK+tK+tL)/mK
(1)
式(1)中:QK为质点K受到的重力、气动力及弯曲恢复力的合力向量,N;tK和tL分别为K和L段软管上的拉力向量,N;mK为K段软管质量与L段软管质量总和的一半。锥套受到的气动阻力

(2)
式(2)中:ρ∞为海平面标准大气密度,kg/m3;νN为第N段软管的运动速度,m/s;ωK为第K段软管附近空气流速,m/s;ddro为锥套的直径,mm;Cdro为锥套的阻力系数,其大小取决于锥套的物理特性。
根据上述分析,质点K的运动学微分方程为

j=1,2
(3)
1.2 受油机头波模型
根据文献[9]中的方法,头波的速度模型采用兰金半体模型模拟受油机机头附近的气流特性。
建立图3所示的坐标系St:该坐标系固连在受油机上,原点Ot取在机头内一点源处;x轴在机头对称面内,并平行于机头的设计轴线指向机头的反向;y轴垂直于机头对称平面指向机头右侧;z轴在机头对称平面内,与x轴垂直并指向机身上方。

图3 兰金半体绕流模型坐标系Fig.3 Coordinate of the Rankine half body model
对于某型受油机,其机头最大半径为0.6 m,在上述坐标系中,受油插头在飞机右侧,受油插头尖部坐标为(-4,1.2,0.9)。在来流真空速100 m/s时,受油机机头附近速度矢量分布如图4所示。

图4 受油机头部附近速度矢量Fig.4 Velocity vectors of bow wave
由图4可知,在接近受油机机头处,气流存在远离机头的分量,且越接近机头,分量越大。正是由于气流的法向和切向分量,使得受油机在靠近锥套时,锥套产生远离受油机的运动。
1.3 仿真流程
给定初始软管状态值后,利用式(3)计算得到各质点二阶位移,利用四阶龙格库塔进行时间推进,得到新的软管状态值,循环迭代,直到软管各质点速度和加速度小于收敛阈值,本文中收敛阈值取0.01。对接成功判据为插头尖与锥套中心的距离小于锥套半径。具体步骤如下。
(1)设置受油插头与加油锥套初始状态参数。
(2)受油机受油插头运动求解。
(3)判断插头是否与锥套到达相同纵向位置,若是,则计算结束。
(4)若否,解算插头与锥套相对距离。
(5)求解锥套所在位置受油机头波速度。
(6)求解加油锥套运动,回到步骤(2)。
(7)计算结束时,利用对接判据判断是否成功对接。
2 模型验证
2.1 稳态模型验证
软管-锥套主要参数如表1所示。
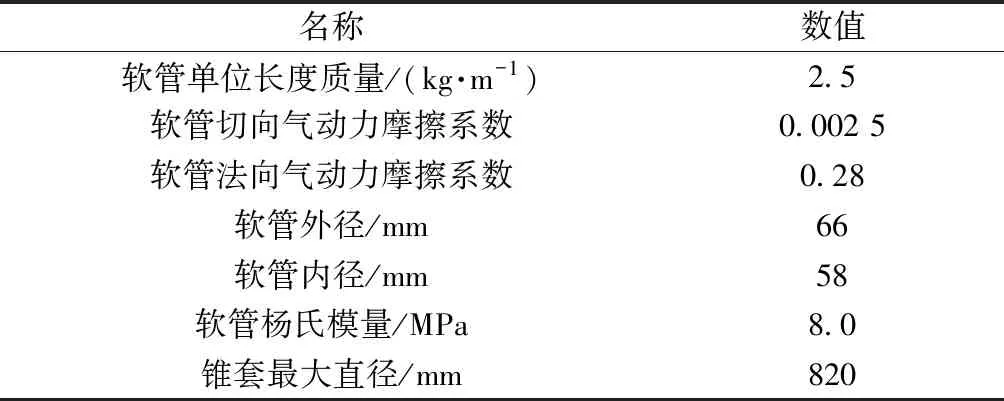
表1 软管-锥套主要参数
在实际飞行中,由于受加油机所在区域自然环境及测试系统等不确定因素影响,软管每次的放出长度不一,为了消除这种不确定性带来的误差,定义无量纲下沉高度P。
P=H/L
(4)
式(4)中:H为锥套下沉高度,m;L为软管伸出长度,m。
利用某型飞机中心线处软管-锥套稳定拖曳的试验数据,分别比较了飞机在气压高度Hp为2 000、6 000、8 000 m,表速为400~500 km/h锥套稳定位置,如图5所示,可以看出,在相同高度中,速度越快,锥套受到的气动阻力越大,下沉量越小,数值计算与试验误差不大于5%。
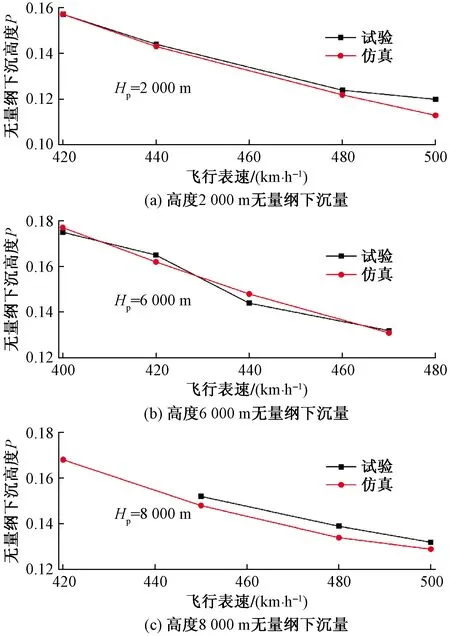
图5 不同高度速度锥套稳定位置比较Fig.5 Stable position at different altitude and velocity
2.2 动态模型验证
飞行高度为8 000 m,飞行表速为500 km/h,模型计算中,受油机以0.7 m/s匀速直线接近锥套,试验中,受油机靠近锥套的速度在0.5~1.2 m/s,软管-锥套主要参数如表1所示。
为验证模型的动态特性,将仿真结果与试验数据进行对比。取成功对接前最后5 s锥套的飘摆轨迹,为突出锥套飘摆的特征,进行对比时,以成功对接点为零点,并将位移数据除以锥套的半径,得到无量纲化的锥套飘摆轨迹S。图6所示为锥套在法向和侧向的无量纲摆动幅值,可以看出,计算和试验数据锥套的轨迹都呈现规律性的“波峰-波谷”运动,成功对接时,锥套在两个方向的最大偏移量都小于锥套半径或略大于锥套半径。计算结果锥套的摆动幅值和摆动频率与试验数据相近。
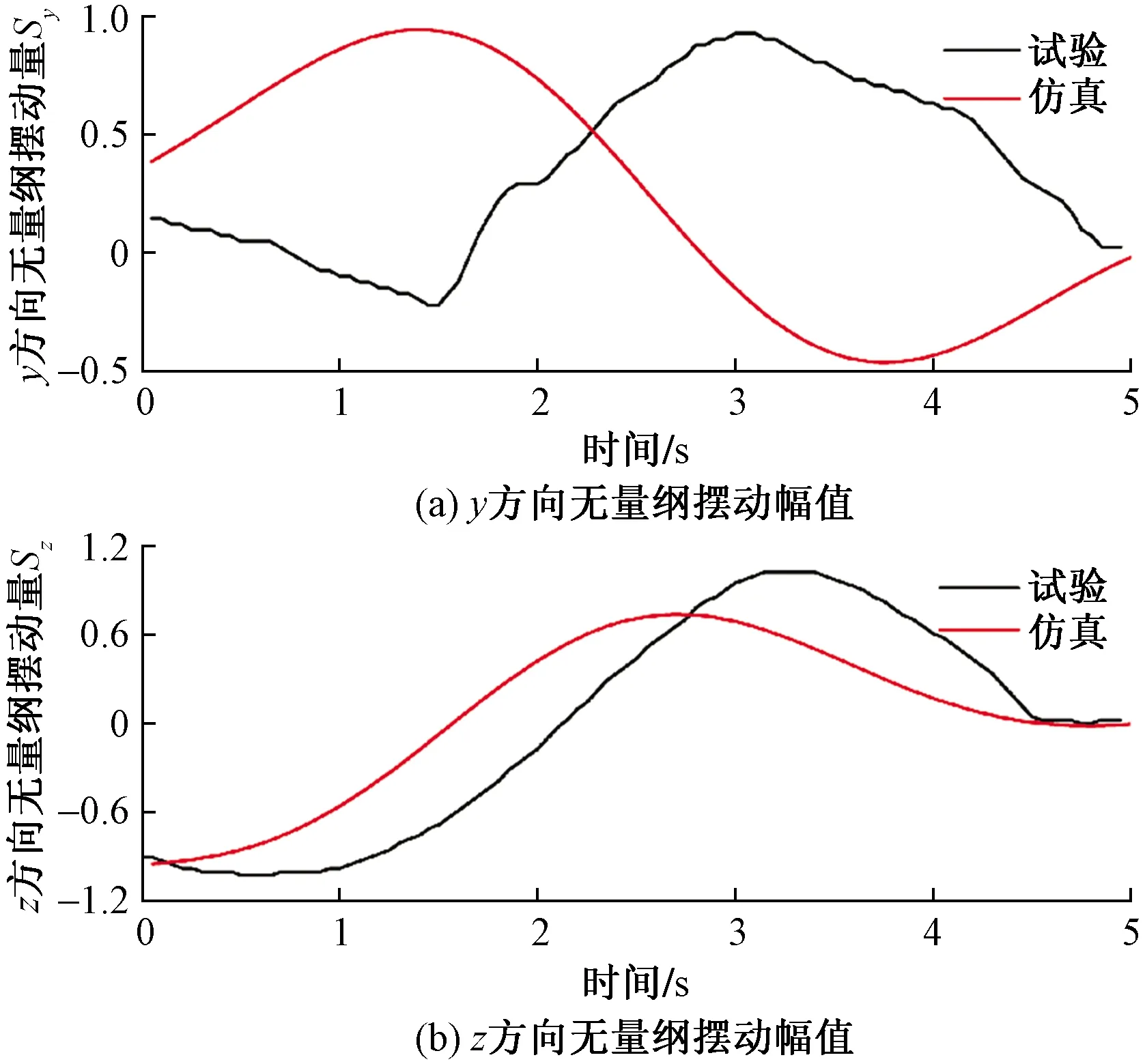
图6 锥套在法向和侧向的无量纲摆动幅值Fig.6 Dimensionless amplitude of drogue at normal and yawing
3 计算结果分析
3.1 受油机头波影响下的锥套运动特征
数值仿真中,锥套在20 s时稳定拖曳在加油机后方,30 s时,在距离锥套后方14 m处加入头波扰动,使受油机插头正对锥套附近的S′处,如图7所示,受油机匀速直线向锥套靠近,直到受油插头和锥套到达相同的纵向位置,仿真停止。计算中,设定受油机飞行高度Hp=5 000 m,飞行表速Vi=460 km/h。

图7 对接起始偏差位置说明Fig.7 Representation of the receiver tracking a point offset of the drogue
为研究锥套在受油机头波影响下的运动特征,使受油机在稳定锥套后方14 m处,受油插头正对锥套中心,受油机分别以0.5、1、1.4 m/s匀速直线向锥套靠近。以初始位置为零,在受油机坐标系St中,比较2.2节所述的锥套无量纲飘摆轨迹S,如图8所示。
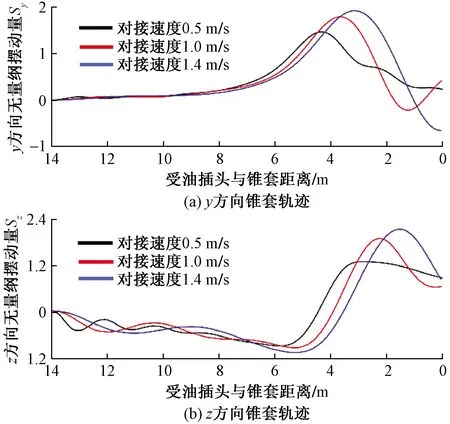
图8 不同靠近速度下锥套轨迹Fig.8 Trajectory path of drogue at different docking velocities
由图8可以看出,在受油机接近锥套的过程中,受油机头波改变了锥套周边的流场,使锥套进行单摆运动,在对接速度为1 m/s时,能看到完整的周期。当受油机距离锥套较远时,头波气流有向飞机飞行方向压缩的趋势,致使锥套附近气流速度减小,锥套下沉量增大。在受油机插头接近至距离锥套初始位置7 m时,锥套在y方向开始出现明显的向右位移,接近至5 m时,在z方向开始出现明显的向上位移,并从最远点回落。
比较受油机以不同的速度靠近时锥套的运动轨迹,靠近速度越大,锥套在y、z方向上的偏移量越大。这是由于越靠近受油机,头波的法向和侧向速度矢量越大,在受油机前进相同距离时,头波在锥套处产生的推力越大,偏移也就越大。
3.2 成功对接初始偏差位置
仿真停止后,利用对接判据进行判断,成功对接的判据为:受油插头尖部距离锥套中心小于锥套半径,则对接成功。若对接成功,则将该位置S′称为“最佳对接起始偏差位置”。
当受油插头正对锥套中心,即初始偏差为零时,在锥套轨迹图中加入受油插头轨迹,Se为受油机坐标系中锥套和插头的运动轨迹,如图9所示。

图9 起始偏差为零时锥套在yz平面的运动轨迹Fig.9 Trajectory path of drogue at yz in zero offset
由于受油插头固定在受油机头部,因此在受油机坐标系中受油插头尖部坐标不变。仿真停止时,受油插头在y方向距离锥套中心0.27 m,小于锥套半径0.41 m,z方向相距0.65 m,大于0.41 m,不符合对接成功的判据,因此对接失败。
按照上述方法,在距离锥套14 m远的yz平面变换受油机初始对接位置,遍历整个平面,则在高度Hp=5 000 m,飞行表速Vi=460 km/h,对接速度ΔV=1.4 m/s匀速直线对接时,能够符合成功对接判据的初始位置如图10所示。
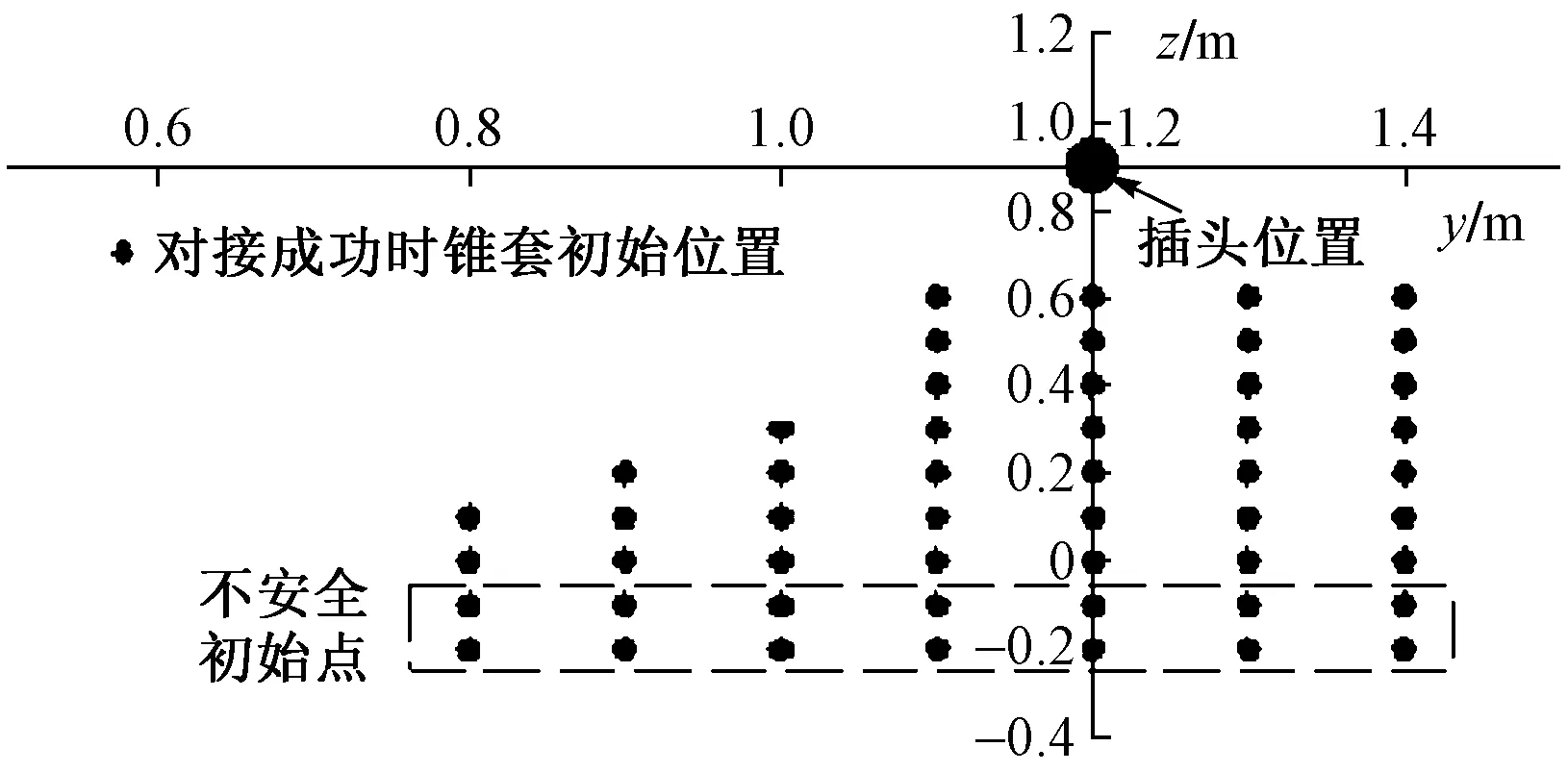
图10 ΔV=1.4 m/s成功对接的初始偏差位置Fig.10 Offset of capture at 1.4 m/s
在检查上述能够成功对接初始点的锥套运动轨迹时发现,初始点z坐标小于零时,由于兰金半体模型速度矢量有远离飞机的分量,因此,在受油机由远及近的过程中,锥套大部分时间在受油机下方摆动,处于受油机飞行员视野以外,不利于飞行安全,因此将z坐标小于零的起始点舍去,得到最终的成功对接初始偏差位置如图11所示。
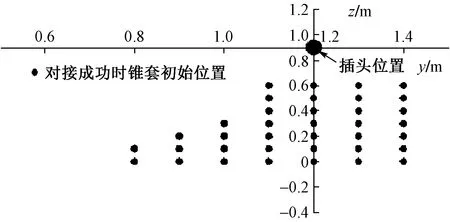
图11 舍去不合理点后的成功对接初始偏差位置Fig.11 Offset of capture at 1.4 m/s after eliminating unsafe points
由图11可以看出,ΔV=1.4 m/s成功对接的初始偏差位置在受油机坐标系中,使锥套初始稳定位置分布在受油插头下方1.5r~3r(r表示伞套的半径),左右分布在-1r~0.5r的区域。
分别计算在相同的高度速度下,对接速度ΔV为0.5、2、2.5 m/s的成功对接初始偏差位置,如图12、图13所示。
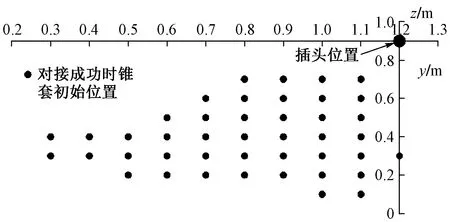
图12 ΔV=0.5 m/s成功对接的初始偏差位置Fig.12 Offset of capture at 0.5 m/s

图13 ΔV=2 m/s成功对接的初始偏差位置Fig.13 Offset of capture at 2 m/s
受油机匀速直线靠近速度ΔV=0.5 m/s时,成功对接的初始偏差位置在受油机坐标系中,使锥套初始稳定位置分布在受油插头下方0.5r~2r,左右分布在-2.25r~0的区域。受油机匀速直线靠近速度ΔV=2 m/s时,成功对接的初始偏差位置在受油机坐标系中,使锥套初始稳定位置分布在受油插头下方1.5r~2.2r,左右分布在-2.25r~0的区域。对接速度ΔV=2.5 m/s时,没有能够成功对接的初始偏差位置。
根据以上的计算结果,采用匀速直线靠近策略进行对接时,应该将受油机的靠近速度控制在0.5~2 m/s,若靠近速度过小,则可能由于对接力过小,受油插头无法插入加油锥套中。在以合理的对接速度靠近时,在受油机飞行员视野中,“最佳初始偏差位置”分布在受油插头的左下方区域,且靠近速度越小,成功对接初始偏差区域越大。
3.3 对接速度无关区域
在实际空中加油对接中,受油机在最后10 m靠近锥套时,对接速度在ΔV=0.5~1.5 m/s变化,难以保持恒定。在以上的计算中发现,当ΔV=0.5~1.5 m/s时,其成功对接的起始偏差位置存在重叠,如图14所示。

图14 实际对接中速度不敏感区域Fig.14 Insensitive region of docking velocities
根据上图显示的重叠区域,分布在受油插头下方r~2r,左右分布在-2r~0。受油机的初始偏差稳定在对接速度不敏感区域时,当受油机对接速度在合理范围内变化时,都能成功完成对接。
4 对接策略
在实际空中加油对接中,能够影响锥套稳定的因素可以大致分为随机影响因素和规律性影响因素。其中随机影响因素包括大气紊流和阵风,规律性因素对对接影响最大的当属受油机头波。根据上述的计算研究,受油机插头距锥套7 m时,锥套产生了明显位移。对于受油插头在右侧的受油机,在受油机飞行员视野中,锥套产生向上向右的摆动。当受油插头起始位置处于“最佳对接起始偏差”区域内时,受油插头在和锥套到达相同纵向位置时,受油插头就能处于锥套半径内。因此根据以上结果,提出“调整靠近-等待-对接”的受油机对接进近策略。
调整靠近:受油机初始处于图15所示的A位置,在由A位置至稳定位置的过程中,不断调整受油机,使锥套处于受油插头左下方,受油插头处于“最佳初始对接偏差位置”。
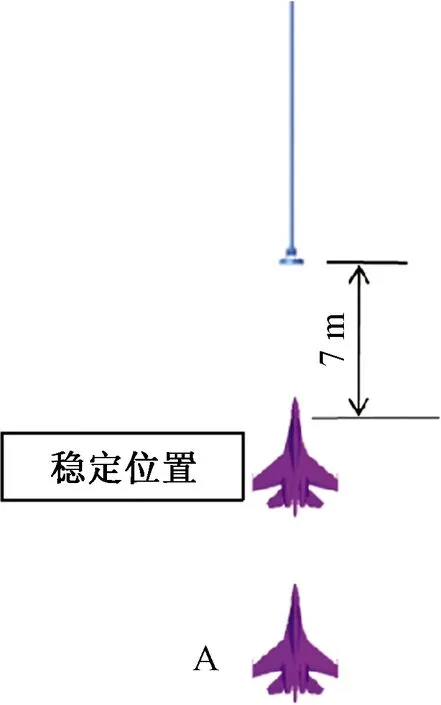
图15 对接策略示意图Fig.15 Strategy of refueling docking
等待:受油机在调整中逐渐靠近锥套,在距离锥套7 m的位置与加油机保持相对稳定,等待锥套稳定。
对接:受油机在合理的对接速度范围内直线向锥套靠近。
如果对接失败,可适当减小对接速度,按照上述策略重新对接。
5 结论
采用数值计算方法,在建立软管锥套6自由度模型和受油机头波模型的基础上,忽略紊流和阵风,计算了不同对接速度下锥套的运动轨迹,得到如下结论。
(1)受油机靠近稳定锥套时,锥套产生周期性“远离-回摆”运动,受油机靠近锥套的速度越大,锥套摆动幅值越大。
(2)提出受油机成功对接的“最佳初始偏差位置”,发现在合理的对接速度范围内,存在对接速度不敏感的区域,初始偏差在该区域内时,均能成功对接。
(3)根据计算结果提出“调整靠近-等待-对接”的对接策略,利用该策略对接,能够将头波影响降至最低。
在后续工作中,还将继续研究考虑大气紊流情况下的对接策略,研究提高对接成功率的方法。
猜你喜欢
昆钢科技(2022年4期)2022-12-30
现代仪器与医疗(2021年5期)2021-12-02
南方农机(2021年1期)2021-01-20
北京航空航天大学学报(2020年10期)2020-11-14
通信电源技术(2020年1期)2020-01-06
科技视界(2018年22期)2018-10-08
汽车实用技术(2015年8期)2015-12-26
中国科技纵横(2014年24期)2014-12-11
航空世界(2014年7期)2014-09-24
四川党的建设(2014年9期)2014-08-23
