基于激光雷达定位系统的全自主移动机器人
2020-07-03 04:00李鑫磊潘阳红曾明峰李思源成都工业学院四川成都611730
科学技术创新 2020年19期
李鑫磊 潘阳红 曾明峰 鲜 岭 李思源( 成都工业学院,四川 成都611730
1 选题背景
激光探测及测距系统简称为激光雷达, 另外也称Laser Radar 或LADAR 是NASA 于1970 年开始研发。 近年来随着激光雷达技术的逐渐成熟和设备生产工艺的优化,该技术也越来越多的应用于自动驾驶技术, 自动机器人等民用行业。 其中在医疗设备领域也又逐渐崭露头角。 例如,在2019 年的新型冠状病毒的防疫过程中,为了避免医护人员感染,有的国家的医疗机构就使用自动机器人实现医疗人员和患者之间的物质运输。 根据不同种类的激光雷达的不同特性,其应用的行业也有所不同。依据激光雷达的线数能够分为多线激光雷达和单线激光雷达。对于雷达性能要求不高的服务机器人多采用单线激光雷达,例如餐厅服务机器人、医疗机构内部的“ 物流机器人”等等。 因为是单频点工作,为了取得周围360 度的物体位置信息,不得不增加应该一个机械旋转机构和增加扫描频率,并机械旋转速度和扫描频率匹配来获取外部信息。 自动驾驶技术中多采用多线激光雷达。
2 方案设计
机器人底盘设计采用O-square 全向轮设计方案,O-square四轮底盘不论在走直线还是走曲线都可以提供强大的向心力,在抵消惯性的同时, 还提供了强劲的扭矩。 保证机器人可以快速启动与停止。
2.1 装置的工作原理
2.1.1 全向轮。轮毂和辊子共同组成全向轮的基本结构。轮毂是整个轮子支撑骨架, 安装在轮毂上的鼓状物则是辊子。 轮毂轴与辊子转轴之间呈90°。 轮毂轴与辊子转轴之间的夹角不同就可以制作出功能各不相同的轮子。 2.1.2 激光雷达。 激光雷达运用自动传感器快速获取三维空间点云形式的数字信息。 激光雷达主要使用红外到紫外之间的光谱段, 首先发射机向周围周期性的发射激光束,遇到障碍物后,激光束会反射到接收机,把光信号处理成可以读取的电信号。 测量出激光束从发射机到接收机所经历的时间、 信号类型和电信号频率。通过分析得出障碍物距离机器人的距离与角度、机器人的运动速度及方向( 位姿)。
2.2 结构设计思路
2.2.1 根据实际功能需求确定使用全向轮底盘。 2.2.2 根据模型设计出符合功能需求的机器人结构。 2.2.3 使用UG、SW 等工业设计软件设计出非标零件结构。
2.3 注意事项
2.3.1 非标零件多为碳纤维材质。 2.3.2 激光雷达是一类对精度要求较高的传感器,使用运输中请勿碰撞。 2.3.3 调试好工作状态的激光雷达,在使用过程中避免位姿的变化。 2.3.4 使用之前检查供电状态、擦拭激光镜头。
3 理论计算
3.1 外形尺寸设计
根据功能需求与提高空间利用率,通过三维设计,最终确定其外形尺寸为:550mm×550mm×300mm。
3.2 材料选择
非标住零件的主要材料为碳纤维, 部分零件使用铝合金ZAlCu5Mn(ZL201)
3.3 底盘设计
3.3.1 电机选型。 假定电机所需要承受的最大阻力为300N。

式中:
P——输出功率( KW);T——修正过的力矩数值( N·M);nb——转速( r/min);U——转动效率;算得直流电机输入功率,最终选定电机型号:M3508。
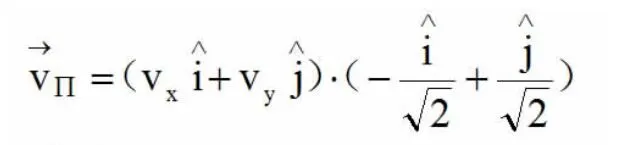
3.3.2 全向轮速度
a.轮子的速度

Vtx—— X 轴速度,右为正。 Vty—— Y 轴速度,前为正。
b.轮子轴心位置的速度

c.辊子的速度
3.3.3 减震机构
采用平行四边形机构,使轮轴轴心于地面平行,确保全向轮拥有最大接触面积,三根弹簧减震器形成稳定的三角形,不仅实现减震的功能,还能实现稳定结构的用途,动力来自于3508电机,连接万向节为全向轮提供动力,可以有效的避免侧面冲击带来的破坏。
3.4 雷达选型
3.4.1 三角测距

q——实测距离;s——激光头与镜头距离;f——焦距;β——夹角;d——实测距离。
3.4.2 旋转扫描

4 设计总结
4.1 遇到的问题及解决办法
模型设计无从下手。
解决方法:运用TRIZ 技术冲突解决原理设计三维模型。 需要设计的是O-square 雷达机器人。
4.2 结论
研究设计O-square 雷达机器人的结构, 需要利用UG、CAD技术进行设计, 着重几下几个问题讨论:4.2.1 激光雷达高精度模型;4.2.2 部分机器人底盘结构的设计关键技术, 包括减震机械结构调节。
猜你喜欢
科学技术创新(2022年26期)2022-09-26
机械工业标准化与质量(2022年5期)2022-08-12
机械工业标准化与质量(2022年6期)2022-08-12
小学科学(学生版)(2021年7期)2021-07-28
小学科学(学生版)(2021年3期)2021-04-13
昆钢科技(2020年4期)2020-10-23
幼儿园(2020年22期)2020-03-29
新商务周刊(2019年12期)2019-08-08
汽车实用技术(2018年13期)2018-07-26
大陆桥视野·下(2017年8期)2017-09-19