
基于积木式机器人的机电专业信息化课程教育实践
2020-07-04 04:27蔡舒旻
机电信息 2020年14期

摘要:以积木式机器人为载体,将《机械设计基础》《传感器应用技术》和《单片机控制技术》等机电类专业课程内容进行合理整合,有针对性地将创新精神、创新知识、创新技能与活动融入专业教育中,探讨了机电专业课程与创新教育融合的教学内容、方法和模式。
关键词:积木式机器人;机电信息化;创新教育;课程融合
0 引言
创新教育是以培养创新意识、创新精神、创新思维、创新能力为目标的创新人才的培养活动。相对于传统教育,它是一种新型的教育模式,是一种全新的以创新为先导的教学模式,是教学内容、方法、思想、评价及教育体制的创新[1]。
机器人可看作是一个典型的综合性学习平台,其集合了现代工业产品设计、机械设计、电子技术、传感器技术、计算机软件编程、人机交互和人工智能等诸多领域的先进技术,在职业教育课堂中,尤其是机电类专业课程的教学中,引入积木式机器人对于打破学科界限,实现学科间的深度融合意义重大,对于激发学生的学习兴趣,开拓学生专业视野,培养学生的科学精神有着深刻的现实指导作用。
1 课程融合的设计理念
笔者在对专业课程内容进行整合设计和实施时,始终贯彻工程实践和创新的原则和方法。通过建构课程主题,呈现积木式机器人的结构设计、结构搭建、程序编写、整机调试等一系列的探究式活动,使得学生在教学项目的反复改进过程中掌握专业知识,同时形成先进的创新理念,掌握创新技巧,提升创新能力。课程设计注重学科课程之间的融合,将学生综合知识与技能的学习置于首位,构建了涉及机械设计、电子技术和单片机编程技术等几大领域的项目课程体系。
1.1 基于建构主义学习理论的积木式机器人项目课程
以机电一体化专业为例,在教学实践活动中,我们以积木式机器人为载体,提取该专业“机械设计基础”课程中的机构、传动、零件模块中的相应内容,结合“传感器应用技术”课程中的光敏、磁敏、超声等传感器内容以及“单片机控制技术”课程中相应的计算机编程思想与原理,构建了一个多学科融合、多技术集成,且符合学生认知规律的项目实践平台。在课程教学中,教师充分利用积木式机器人平台的实施特点,结合机器人系统的具体部件与编程环境进行具体教学项目的设计,包括了重构课程知识点和建构与实际问题密切相关的学习主题,通过动手实践培养学生的综合能力,如团队协作能力、问题解决能力、交流沟通能力和创新思维能力等。
1.2 主题项目设计原则
在进行积木式机器人主题项目设计时,首先要考虑其可实施性,需要把握机电一体化集成与融合的关键和核心,既需要考虑系统硬件方面的实施基础,又要考虑学生自身的学习基础、知识和技能储备等软件方面的实施基础。其次,要充分权衡每个教学项目的容量是否均匀和适当。最后,要注重项目与项目之间进阶展开,保证学生能很容易地投入并沉浸至项目中,同时在项目实施过程中不断有新的挑战来吸引和激励他们,从而提高学生解决问题的能力与信心。
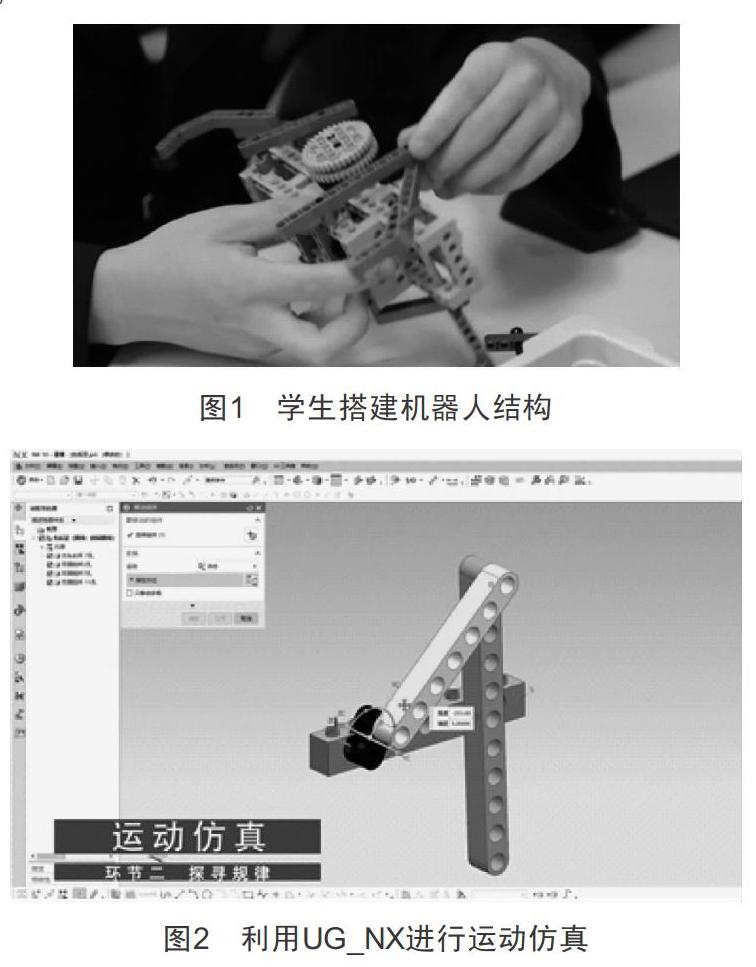
本文以消防机器人项目为例,学生在设计主传动结构时,将应用到课程中的蜗轮蜗杆传动和齿轮传动等相关知识;在设计爬行足结构时,将应用到四杆机构的相应知识;而在设计消防弹抛掷结构时,将应用到棘轮机构的相应知识。学生搭建的机器人结构如图1所示,利用UG_NX进行运动仿真如图2所示。
此外,学生还将应用“传感器应用技术”的红外传感器进行火源的判断,应用超声传感器进行测距避障等;应用“单片机控制技术”中对驱动电机的转向、转速控制知识及条件判断和循环等单片机编程思想。在各门课程中,学生分别完成相应的主题任务,最终整合成一个完整的综合性项目,使积木式机器人能感应到模拟的火源,并能运动到相应的位置抛掷消防弹至火源,完成灭火动作。
2 主题任务教学实践案例
笔者所在教学团队进行了两轮的教学实践—反思—改进的循环研究,并逐步完善课程的设计和实施过程。下面以某项目中消防机器人的任务二:爬行机构设计中的机械部分为例,就课程的实施过程进行具体阐述。
2.1 课前准备
课前,学生预习教师推送的学习资源,完成了相应的练习:(1)根据运行动画判断机构类型;(2)根据杆长条件判断机构类型。
2.2 课堂实施
2.2.1 环节1:创设情境
课中,教师播放消防机器人攀爬动画,发布任务主题:搭建机器人爬行足。学生观看动画,并分组尝试搭建爬行足结构,部分组的爬行足无法正常工作,教师引导学生分析原因。
2.2.2 环节2:探寻规律
学生调用教师创建的零件模型,进行虚拟装配和运动仿真,测试不同杆长条件下机构的运行情况,发现在最短杆与最长桿之和≤其余两杆之和的情况下才有可能存在曲柄,而最短杆所在位置又决定了机构的类型。学生分别测试最短杆在各位置时的机构运行情况,小组对测试情况进行总结和归纳,得出机构类型判断的依据,并分组进行汇报。
2.2.3 环节3:实践检验
小组根据上述曲柄存在的条件验证各自的设计,并挑选一个方案进行实际改造,利用可视化编程工具,使机器人完成前行和后退动作。学生根据竞赛要求,结合所学知识,合理设计并改装爬行机器人的足部结构。
2.2.4 环节4:拓展提高
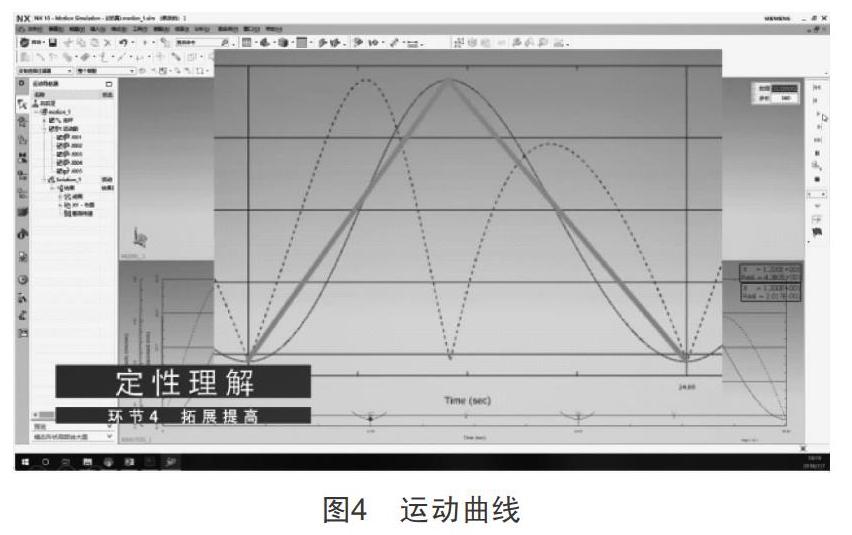
学生发现相同的时间内机器人前进与后退的行程并不一致,这是曲柄摇杆机构的急回特性所决定的。由于机构在高速运行中的速度难以测量,在传统教学过程中,急回特性的推导过程较为抽象,学生难于理解,注意力易分散。
针对上述教学难点,我们重新设计了教学过程。教师选择一组学生的足部结构进行运动学分析。学生观察摇杆实时位移与对应生成的运动曲线,发现v-t曲线波峰两侧的陡峭程度并不一致。学生借助已有的数学知识,判断出两个行程的平均速度不同,从而定性理解急回特性。编程控制机器人运行如图3所示,生成的运动曲线如图4所示。
2.2.5 环节5:总结评价
最后,学生在学习认证系统中进行总结、自评和互评,认证系统实时记录学生各节点完成情况和评价数据,实现了跨学科、跨专业学习数据的互通和互认。
2.3 课后拓展
课后,学生进一步完善任务报告,发挥创新精神,为机器人设计不同工作条件下的行进机构方案,并预习机器人的抛掷机构。
3 结语
本课程以积木式机器人为载体,使书本上的机械机构变得可见、可触、可实现。利用工业设计软件,将抽象的几何计算转变为直观的三维模型,实现了从传统课堂向创客空间的转变。积木式机器人构建了一个课程融合的平台,为学生打下了学习工业机器人的基础。UG软件使学生可以快速改变设计,提高了教学效率。AutoCAD运动仿真将难以测量的抽象数据转换为形象直观的图表,便于学生发现和总结规律。基于区块链技术的分布式学习认证系统,使得学生在任何课程中完成的任务节点、完成情况、师生评价都能互通和互认,既方便学生调用和访问知识节点,又为教师了解学情、组织教学活动提供了依据,更为学科融合搭建了桥梁。
[参考文献]
[1] 刘艳,闫国栋,孟威,等.创新创业教育与专业教育的深度融合[J].中国大学教育,2014(11):21-22.
[2] 王益,张剑平.美国机器人教育的特点及其启示[J].现代教育技术,2007(11):108-112.
[3] 北京开放大学地平线报告K12项目组.2017地平线报告:新技术驱动教学创新的趋势、挑战与策略[J].人民教育,2017(21):71-75.
[4] 高云峰,师保国.跨学科创新视角下创客教育与STEAM教育的融合[J].华东师范大学学报(教育科学版),2017,35(4):47-53.
[5] 曾祥潘.步入開源硬件智能机器人教育时代[J].中小学信息技术教育,2012(1):76-78.
收稿日期:2020-05-06
作者简介:蔡舒旻(1982—),男,江苏常州人,高级讲师,工程硕士,研究方向:机械工程及自动化。
猜你喜欢
课程教育研究·中(2016年11期)2017-01-04
电脑知识与技术(2016年24期)2016-11-14
考试周刊(2016年85期)2016-11-11
情感读本·理论篇(2016年9期)2016-11-05
科技视界(2016年18期)2016-11-03
科教导刊·电子版(2016年24期)2016-10-29
启迪与智慧·教育版(2016年8期)2016-10-20
求知导刊(2016年20期)2016-09-27
安徽农学通报(2015年15期)2015-08-19
