基于三维激光扫描的船舶测量技术
2020-07-09 10:36陈俊发陈国仁
中国修船 2020年3期
陈俊发,黄 港,陈国仁
(1.广州航海学院,广东 广州 510725;2.广船国际有限公司,广东 广州 511458)
三维激光扫描测量作为一种新的现代测量技术,为空间三维信息的获取提供了全新的方法和手段,其测量采集数据精度高、速度快、操作简单方便,拥有巨大的效率和成本优势。三维激光扫描技术在土木工程、建筑、汽车、模具制造等行业应用广泛[1],但在船舶行业的应用还处于起步阶段,研究及推广三维激光扫描测量技术在船舶行业的应用将有助于提高船舶建造的精度、质量和效率,进一步提高我国船舶工业的数字化、信息化、智能化设计与制造的综合能力。
1 传统测量方法
通常对船舶进行改装或者加装设备,需要先利用原船图纸进行初步方案设计,然后上船进行现场勘探测量,最终根据测量数据利用CAD等二维设计软件设计出施工图纸。传统测量方法一般都是工人采用直尺、卷尺、水平仪、量角器、分度头、经纬仪等测量工具在现场测量出构件设备的距离、大小、角度、管路直径等。
由于现代船舶具有大型化、空间结构复杂、设备系统种类多等特点,并且一直处于运营状态。传统测量方法不但需要搭设大量脚手架,也要测量人员花费大量的时间进行测量,甚至需要让船停运,耗费大量人力物力,费用和时间成本巨大,还存在安全风险。并且,这样的测量方法产生的误差较大,会导致设计出来的施工图纸不准确,错位、干涉等错误较多,需要反复测量、频繁返工返修,致使工程质量和进度无法保证,成本高、效率低。
2 三维激光扫描测量技术在船舶的运用
随着激光定位和激光扫描技术日渐成熟,把三维激光扫描测量技术运用到船舶测量中,可以很好修正传统测量方法的缺点和不足。激光扫描方便、快捷、准确,可以得到高精度点云数据和高清全景图像。并且激光扫描可以在船舶正常航行时进行,不用搭设脚手架,可以避免多次反复测量,降低安全风险,节省大量人力物力及时间,大大降低成本。通过实船激光扫描,我们可以将船舶结构、管系、设备等通过点云的方式呈现到计算机端,可以直接在计算机端测量所获取的船体各构件及设备的参数,如构件大小、管径、角度、距离等。在获取船舶点云数据后,通过逆向建模软件,将点云数据转化为船舶实体3D模型。有了船舶实体模型后就可以直接在3D模型里进行相关改装设计、专业协调、干涉检查,还可以进行虚拟仿真建造。通过三维设计评审后就可以导出施工图纸,进行分段和构件预制、管子加工、设备采购等准备工作,这样的生产组织方式大大缩短船舶的进厂时间,提高了船舶改装质量和效率。
3 运用三维激光扫描测量技术的要点
3.1 上船扫描
由于船舶的大型化、空间结构复杂、设备系统种类多,实船三维激光扫描精度要求高且工作量大。以一艘19 000 TEU集装箱船的机舱部分扫描为例,大约需要设置300个站点进行扫描。按照1台扫描仪、2个熟练操作人员的配比,1组人员大约需要5天时间才能完成整个船尾分段(包含烟囱部分、上甲板、机舱甲板、底甲板、双层底甲板等)的扫描和点云数据采集。实船机舱三维激光扫描可以安排在船舶正常航行的一个航次期间进行,扫描人员携带设备上船扫描,船舶不用停航,不影响船舶正常营运。
3.2 扫描站点设置
扫描站点的设置是根据扫描对象、范围、规划路径、精度要求等,一般在每层甲板按顺序布置。另外,设置扫描站点后要放置标靶球,为提高扫描精度提供参考。在空间较大、设备多的复杂区域,利用标靶球可以很大程度降低人为误差[2]。站点设置和标靶球是三维激光扫描测量的重要基础工作,可提高扫描准确性、精度,减少时间、空间的浪费。同时,为了方便后续点云数据的拼接配准,站点设置好后要在图纸上标记对应的站点信息。船舶某区域站点标记示意图如图1所示。
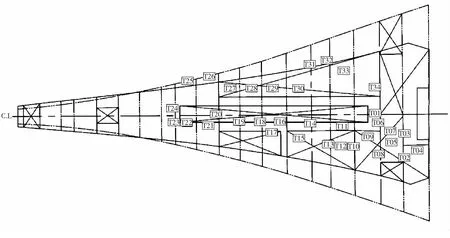
图1 站点标记示意图
3.3 扫描仪参数设置
扫描仪各种参数设置直接影响点云数据的质量,扫描前工作人员要根据扫描区域的具体情况如空间大小、结构的复杂程度、设备系统的密集情况、光线、湿度、温度、震动等因素,结合自己的经验积累,参考说明书中扫描仪参数设置表,对扫描仪的分辨率等各种参数进行设置,中途还需要做些调整。
3.4 关键位置注意事项
1)在震动较大区域,由于机舱主机、发电机等设备震动比较大,会影响测量精度,此类区域可以选择船舶停靠港口装卸货停机时进行扫描。一艘万吨级船舶停靠码头装卸货至少需要2天的时间,该部位扫描大概需要设置30个站点,时间充足。
2)在风、气流较强区域,由于船舶在海上航行,在上甲板扫描时,一定要避免在大风大浪的情况下进行扫描。以免引起扫描仪抖动,导致扫描质量不佳。
3)在强光区域,需要同时在室内和室外扫描时,一定要注意窗口以及舱门的逆光情况,一般造成这样的原因多为强太阳光或强灯光。这种情况下,可采取阴天、夜晚或将灯光亮度调低再测量的方法。
4)在大场景,设备又较多时,运用靶向球、棋盘标靶等标记的方式,同时设置较大的分辨率,既能节约扫描时间,又可解决精度较低的问题。在点云处理时,SCENE软件会自动识别标靶,相对提高点云拟合精度,提高拼接配准的效率[3]。
4 点云数据拼接及处理
点云数据是通过设置好的站点依次进行扫描获得的,当完成所有站点扫描后,将采集到的各站点扫描数据输入计算机,应用SCENE等软件对数据进行精简、过滤除噪、配准、拼接及合并,形成一个完整、直观的点云数据[4]。
在实船扫描中,由于设备老化残缺,扫描设置错误;或者被扫描物件的纹理较粗糙、存在皱纹;或者扫描环境的温度、湿度、曝光度的控制不当等原因,造成测量值与理想值存在一定误差。这些由于被扫描体的属性而导致的误差称之为随机误差。为降低随机误差的影响,使测量值最大限度接近理想值,数据处理人员通常会使用中值与均值滤波法进行滤波处理。点云数据处理前后对比图见图2。
5 点云数据检查
配准拼接好完整的点云数据后,可以直接在点云数据上进行任意两点间的距离测量,可获得管道大小、钢材型号、空间距离、角度尺寸等数据,而这些数据的误差基本控制在2 mm以内。利用扫描仪拍摄的高清全景图像,对比检查船舶实体模型和整合后的点云数据是否存在较大偏差、是否需要进行修正。

(a)处理前 (b)处理后图2 点云数据处理前后对比图
相比传统测量方法,三维激光扫描测量技术在精度、速度及操作方便性上拥有很大优势,在船舶改装工程中能大幅提高精度、质量和效率,减低成本。研究及推广三维激光扫描测量技术在船舶行业的应用具有重要意义。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
文萃报·周五版(2021年45期)2021-11-17
电子制作(2019年14期)2019-08-20
模具制造(2019年3期)2019-06-06
党的生活·党员电教与远程教育(2017年9期)2017-10-17
故事会(2016年21期)2016-11-10
世界博览(2015年20期)2015-09-10
现代营销·经营版(2015年3期)2015-04-20
全球定位系统(2014年1期)2014-08-21
大地测量与地球动力学(2014年3期)2014-02-13