
基于正交优化的电动舵机机械手模糊PID伺服驱动系统仿真与实验分析
2020-07-16 03:43陈睿周海波于恒彬李霞
哈尔滨理工大学学报 2020年2期
陈睿 周海波 于恒彬 李霞
摘要:为了提高电动舵机机械手运动控制的准确性和稳定性,提出一种基于正交试验法的模糊PID智能控制方法。本文以电动舵机为执行元件,建立了捡拾机械手关节伺服驱动系统的数学模型。在传统的比例积分微分(proportion,integrafion,differentiation,PID)控制策略下,加入了正交试验设计和模糊控制的方法,在Simu]ink软件仿真环境申对电动舵机机械手关节驱动系统的开环控制、正交优化的PID控制和模糊Pm控制进行仿真分析,并对单自由度和双自由度机械手进行运动控制实验。仿真与实验分析结果表明,利用正交试验法对PID参数进行整定,能快速的确定合适的PID参数,大大减小试验次数;利用模糊控制可以提高PID控制的适应能力,虽然使系统的上升时间和调整时间有少量增加,但是超调量明显减小,提高了系统的准确性和稳定性。
关键词:机械手;电动舵机;PID;正交优化;模糊控制
DOI:10.15938/j.jhust.2020.02.003
中图分类号:TP273.4文献标志码:A 文章编号:1007-2683(2020)02-0016-09
0引言
随着机器人技术的发展,机器人的用途越来越广,开始从传统的工业领域向农业、军事、医疗、服务、建设、生活等各个领域渗透。机械手作为机器人技术领域的核心部分,能够模仿人体的肢体动作,实现自主抓取、搬运等操作,应用领域广阔,已成为国内外争相研究的热点。机器人手臂是机器人最灵活关节,作为机器人手臂的关节驱动器,舵机具备体积小、重量轻及功率大的特点正好能满足要求。同时电动舵机与液压舵机、气动舵机相比,具有结构紧凑、易于维护、经济性好等优点,因此电动舵机更加适用于机器人关节驱动。
由于现代服务业发展迅速,服务机器人需要满足响应速度快、精度高、运动稳定性好等特点,但电动舵机本身的半闭环系统并不能满足这些条件,所以必须对其进行优化控制。由于PID控制是最早发展起来的控制策略之一,因其算法简单、鲁棒性好等特点,所以在工业控制中被广泛应用,但其也具有参数难以确定、无法满足复杂的高精度的控制场合、在时变系统中适应性下降等诸多缺陷。
在工业伺服驱动系统中,PID参数的设定通常达不到全局的最优解,但是利用正交试验的方法能够在有限的试验次数中,得到控制效果较佳的PID参数值。王幼民等在2007年利用正交试验法对电液伺服系统PID参数进行整定,提高了电液伺服系统的控制精度,减少了响应时间且减少了试验次数。彭安华等在2011年利用正交试验法对机床闭环伺服系统进行PID参数优化,减少了超调量和上升时间。
在另一方面,传统的PID控制会因为外部环境的微小变化就会脱离最佳稳态,无法满足复杂的高精度控制以及工业伺服驱动系统的稳定性控制。把传统的PID控制方法引入模糊控制器,使用模糊PID控制可以使系统获得良好的静态和动态特性。哈尔滨工程大学的陆军等在2009年利用机械手的力反馈,运用模糊P1D控制机械手,具有很好的动态品质,上升时间快,超调较小,且在仿真时间内,具有较高的控制精度,较强的鲁棒性。
本文针对捡拾机器人关节驱动系统电动舵机的控制,提出了一种基于正交优化的模糊PID伺服驱动智能控制方法。建立了电动舵机的数学模型,分析了其闭环系统的稳定性;在传统的PID控制中加入正交优化和模糊控制的方法,正交优化可减少PID参数的调节次数,模糊控制可提高PID控制的适应能力;仿真和实验验证本文提出控制方法的有效性。
1 电动舵机的数学模型
电动舵机的驅动系统一般由控制器、驱动器、直流电机、减速传动机构、反馈电位器等模块组成。
直流电机是电动舵机核心部件,在不考虑阻尼力矩、摩擦力矩的条件下,可以建立其动态过程中的数学模型。直流电机回路的电压平衡方程可表示为:
式中:ua为电机回路电压;ia为电机回路电流;Ra为电机回路总电阻;Eb为电机反电动势;L为电机总电感。
直流电机的反电动势可表示为:
式中:KE]为反电动势系数;θ为直流电机的旋转角度。
直流电机的转矩方程和转矩平衡方程可表示为:
综上,分析了电动舵机各组成部件构成和原理,可以得到电动舵机驱动系统的线性传递函数框图,如图l所示。
由图1得电动舵机驱动系统的闭环传递函数为:
本文在关节处采用了ASMC-03B型电动舵机,其功率稳定且自带减速器功能,如图2所示。ASMC-03B型电动舵机各项技术参数如表1所示。
将舵机的闭环传递函数在Simulink的LinearAnalysis Tool中进行幅频特性的分析,可以得到舵机闭环传递函数的伯德图,如图3所示。
在工程实践中,为了使系统有满意的稳定性储备,一般希望相位裕度在30°~60°,幅值裕度要求大于6dBL。由舵机闭环传递函数的伯德图可得,其相位裕度γ=28.7°,幅值裕度Kg=11.2dB,所以舵机闭环系统为一个稳定系统。
2 Matlab仿真分析
2.1 开环控制与仿真
以电动舵机的闭环传递函数为模型,在Simu。link中用输入信号为单位阶跃信号做响应测试。开环控制Simulink仿真结果如图4所示,Simulink开环控制仿真结果数据如表2所示。
由仿真结果图形和数据可以得到,当进行开环控制时,因为电动舵机内部装有电位反馈器,在其内部形成一个半闭环系统,所以系统经过短暂调整,可以趋于稳定。尽管上升时间和调整时间较短,但超调量非常大,所以需要加入其他的控制方法,减小系统的超调量和振荡。
2.2PID控制与仿真
PID控制是一种典型的负反馈控制方式,其是用系统给定值r(t),减去系统的输出值y(t),得到系统输出偏差e(t)=r(t)-y(t),之后对输出偏差e(t)进行比例、积分、微分的控制运算,最终得到PID控制器的输出结果u(t)。
在连续的时间域中,传统PID的控制算法表达式为:
式中:kp为比例系数;Ti为积分时间常数;Td为微分时间常数;ki=kp/Ti为积分系数;kd=kpTd为微分系数。
在PID控制算法中,比例系数kp的作用是加快系统的响应速度,提高系统的调节精度;积分时间常数Ti的作用是消除系统的稳态误差;微分时间常数Td的作用是改善系统的动态性能。
本文以减少系统的超调量为目标,依据PID参数的整定原则确定kp、ki,kd分别在[0.1,1],[10,20],[0.014,0.03]范围中时,系统的超调量已基本控制在15%以内。选取kp=0.1,ki=20,kd=0.03进行系统的PID控制,PID控制仿真结果如图5所示,PID控制仿真结果数据如表3所示。
仿真结果表明,当系统加入PID控制时,上升时间增加了0.05s左右,调整时间增加了0.2s左右,但是其超调量减少了33%左右。应用传统PID控制技术,增加了捡拾机械手关节运动上升时间和调整时间,但是大大减小了其超调量,增强了运动稳定性。
2.3 正交优化的PID控制与仿真
2.3.1 传统的正交试验过程
1)明确试验目的。试验的目的就是选定一组合适的PID参数,使机械手控制系统的准确性和稳定性均达到最佳。由于在本控制系统中最重要的指标是超调量和调整时间,但在进行传统的PID控制时,对PID参数的初步调节已经大幅度降低了系统的超调量,所以特确定调整时间作为本试验的考察指标。
2)确定因素及水平,制订因素水平表。显然本试验是要研究PID三参数对控制指标的影响,因此确定参数为kp,ki、kd,三个参数水平范围的选取与操作人员的理论水平及实践经验密切相关。本文水平范围的选取是建立在大量实验的基础上。
3)选取正交表进行表头设计,确定试验方案。选用正交表时,可以根据水平数和因素数,选择能够满足因素和水平的最小正交表。为保证试验的可靠性,本文选取正交表L9(34)。由單因素实验表明,虽然3个参数之间存在交互作用,但影响的显著性比较小,所以暂不考虑交互作用。
4)试验数据分析与比较。本试验采用直观分析法分析数据。
5)验证试验结果。将分析后的最优数据代入系统,看其效果是否真的使系统的超调量和调整时间都达到了最佳。
2.3.2 基于正交试验的PID控制与仿真
由于PID控制使系统的超调量能够满足工作要求。从而为减少系统的调整时间,增强系统的控制效果,采用正交试验法对PID参数进行整定。设计了L9(34)正交表,因素水平表如表4所示。
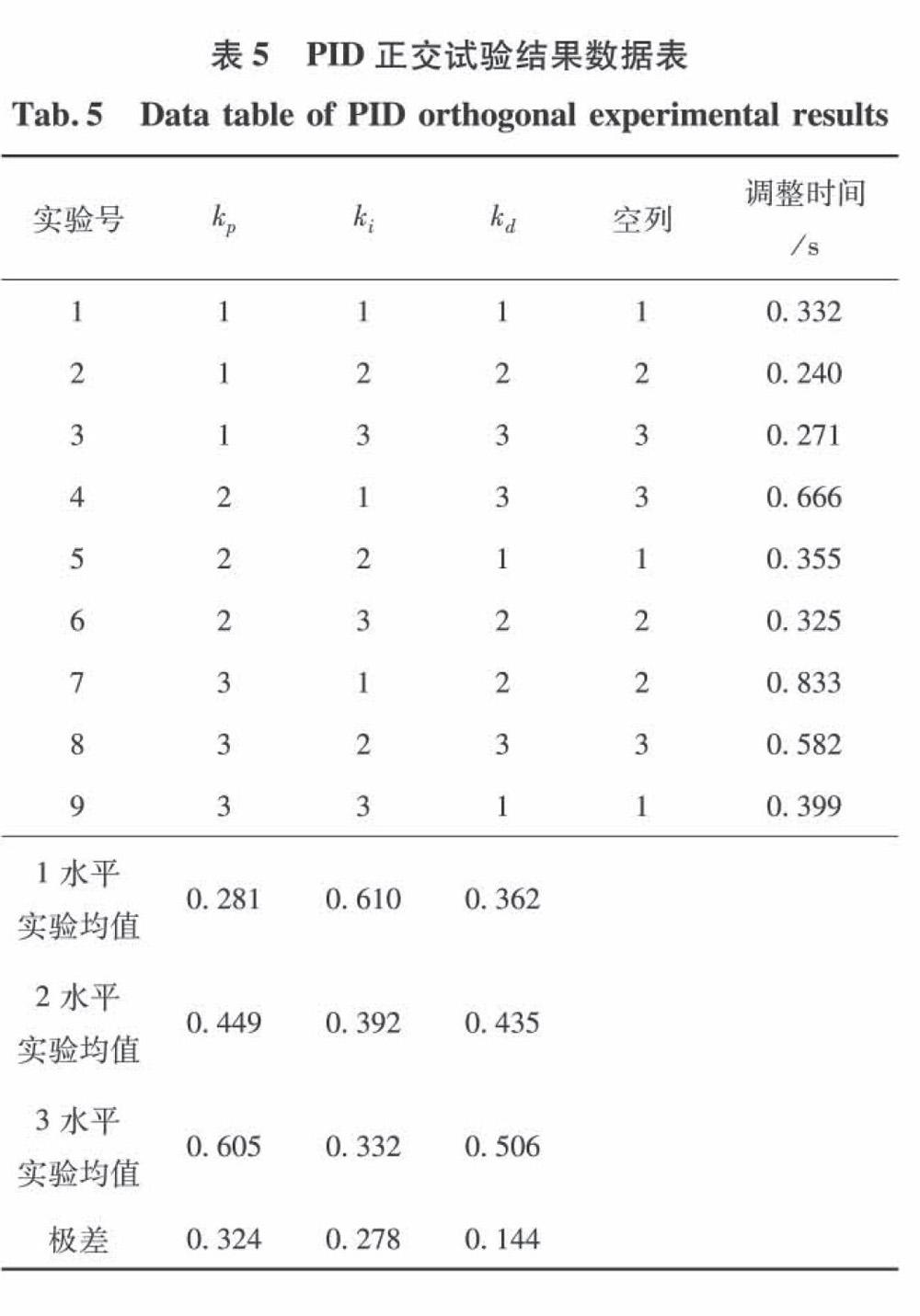
依据因素水平表,以调整时间为目标,依次进行仿真,仿真结果数据如表5所示:
由表5可知,kp、ki、kd3个参数的极差分别为Rkp=0.324,Rki=0.278,Rkd=0.144,Rkp>Rki>Rkd说明在该系统中,kp是对调整时间影响最大的因素。由各因素的水平实验均值分析选取kp=0.1,ki=20,kd=0.01,以其为PID控制参数进行仿真,仿真结果如图6所示,正交优化的PID控制仿真结果数据如表6所示:
仿真结果表明,正交优化后PID控制的上升时间增加,调整时间减少,增加了系统调节的快速性,超调量减少,调节的稳定性进一步增加,正交优化后PID控制能力得到提升。
2.4模糊PID控制与仿真
对于具有大滞后、大惯性、具有复杂的信号追踪的控制对象,PID控制也非常有局限性,模糊PID控制技术可以改善PID的控制缺陷。
模糊PID控制器是在常规PID控制器基础上实现的,一般将e(t)、de(t)/dt作为模糊控制输入量,对△kp、△ki、△kd作为模糊控制输出量,是一种两输入三输出的模糊控制器,如图7所示。
常规PID中的参数的基础上加入模糊控制输出量,形成的新的PID控制参数:
选用上文中正交优化的参数kp=0.1,ki=20,kd=0.01,与模糊控制输出的△kp、△ki、△kd进行新的PID参数计算。
为了减少计算量,同时保证计算的精准度,选取NS、ZO和PS 3个语言变量值,为了保证计算的简便性,△kp、△ki、△kd采用相同的模糊控制规则。模糊规则表按副对角线对称,在对电动舵机控制调节过程中,对正偏差和负偏差都能够进行有效的干预和控制,具有实用意义。模糊规则表如表7所示。按照表7的模糊规则进行similink仿真,模糊PID控制Simulink仿真结果如图8所示:由图8仿真曲线表明,针对电动舵机这类响应快、超调大的系统,正交优化后的模糊PID控制能够很好的解决这种情况,正交优化可减少PID参数的调节次数,模糊控制可提高PID控制的适应能力。系统在响应时间少量增加的同时大幅度降低超调量,增强了系统调控的稳定性与准确性。正交优化后的模糊PID控制仿真结果数据如表8所示:
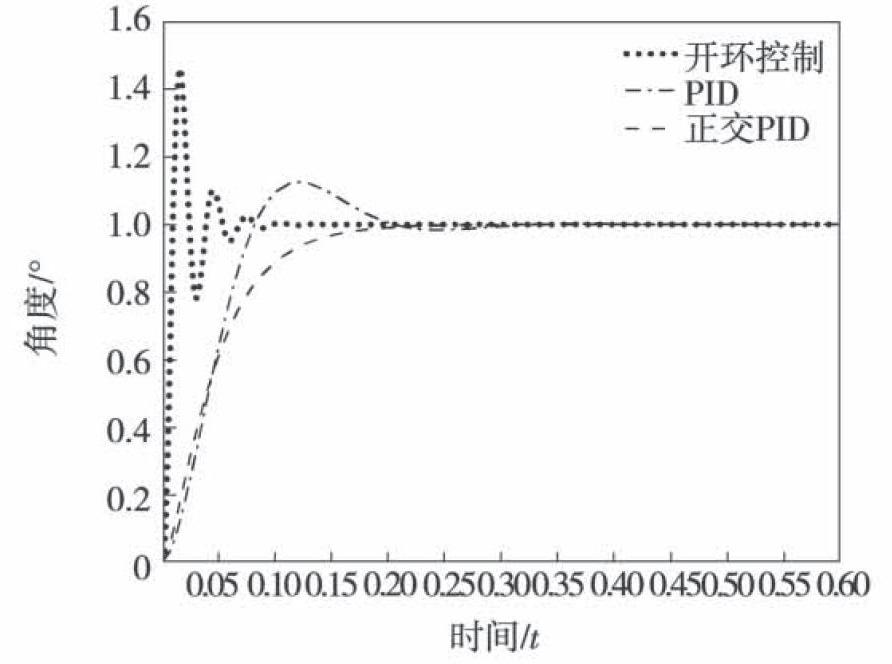
由仿真结果表明,开环控制、PID控制、正交优化的PID控制、模糊PID控制,系统都可以趋于稳定。相对于开环控制,模糊PID控制的上升时间增加了0.08s左右,调整时间增加了0.1s左右,但是超调量明显减小,增强了运动稳定性。相比于正交优化的PID控制,模糊PID控制的上升时间、调整时间和超调量都减小,在增强系统稳定性的同时,加快调节速度。正交优化的模糊PID控制很好的将模糊控制与正交优化两者的优势结合起来,可以实现PID参数的实时整定与控制,对捡拾机械手关节驱动具有很好的调控性能。
3 实验与分析
实验平台如图9所示,为实现数据的反馈,在机械手关节2、关节3装有HKS0-D8G型编码器如图10所示,同时运用STM32嵌入式系统进行了主要控制程序程序的设计,包括机械手运动控制程序、角度信息采集程序、增量式PID程序、模糊PID控制程序等。
3.1 单关节实验
在实际实验测量中,PID控制和模糊PID控制的参数以正交优化的结果kp=0.1,ki=20,kd=0.01为主要控制参数。单关节实验测量机械手角度误差时,对关节2输入不同的转角。θ2(-30°、-60°、-75°),控制器分别对其进行开环控制,PID控制和模糊PID控制,通过编码器测量关节2相对于机械手坐标系Y轴方向(Y=0)的实际旋转角度θ2,同时计算机械手关节角度的角度误差和平均调整时间,结果如表9所示。
输入不同的转角(-30°、-60°、-75°),分别进行单自由度关节的开环控制,PID控制,模糊PID控制,从实验结果分析可得:
相对于开环控制,PID控制和模糊PID控制调整时间有少量增加,原因可能为PID控制和模糊PID控制的算法程序运算增加了调整时间,或者在反馈调节的过程增加了调整时间。但是模糊PID控制在调整时间上比PID控制略微减少。
相对于开环控制,PID控制和模糊PID控制的平均稳定角度相对误差减小4%左右,平均角度稳定误差也有明显减小,说明两种控制方法发挥了负反馈调节的作用。相对于PID控制,模糊PID控制的平均稳定角度相对误差减2%左右。说明模糊PID控制能夠进一步减小角度控制误差。
3.2双关节实验
在实际实验测量中,PID控制和模糊PID控制的参数以正交优化的结果kp=0.1,ki=20,kd=0.01为主要控制参数。双关节实验测量机械手定位误差时,通过控制器给定一个坐标位置,根据运动学逆解运算,控制器分别对其进行开环控制,正交优化的PID控制和模糊PID控制,使其达到目标位置,进行理论位置和实际位置的坐标误差计算。
分别测量相对于机械手坐标系Y轴方向(Y=0),给出X、Z的坐标,经过3种控制方式的实验测试,可以测得机械手末端位置误差,测得多组数据,得到各坐标的平均位置误差,结果如表10所示。
输入不同的坐标位置,分别进行两自由度关节的开环控制,正交优化的PID控制,模糊PID控制,从测量结果分析可得:相对于开环控制,正交优化的PID控制在乎均位置误差上减少50%左右,这表明了正交优化的PID控制能够较大程度的提高控制系统的准确性。相对于正交优化的PID控制,模糊PID的平均位置误差减小30%左右,这表明了,正交优化后的模糊PID控制在上升时间和调整时间少量减少的基础上,使控制更为准确。
根据表10数据可得,当测试的坐标所对应的转角较小时,机械误差较小,所以开环控制误差较小,PID控制和模糊PID控制调节力度小但更为精确;当测试的坐标所对应的转角较大时,这时因为受力问题导致机械误差突然增大,导致开环控制误差变大,这时PID控制和模糊PID控制调节力度加大,使其加快向理论坐标偏移。当测试的坐标所对应的转角较大时误差也较大,原因可能为机械手自重产生的力矩的影响、装配误差的影响或测量过程中测量误差的影响。
4 结论
1)针对电动舵机机械手运动控制的准确性和稳定性,本文提出了一种由正交优化和模糊控制相结合的PID控制方法。相比于传统的PID控制方法,利用正交试验法对电动舵机进行PID整定,试验次数较少,能快速确定合适的PID参数;利用模糊控制能使系统性能达到最佳,可明显提高系统的控制精度,大大减少超调量。为了验证模糊PID控制的有效性,在Simulink中将其与开环控制、传统PID控制和正交优化的PID控制进行比较。模糊PID控制在上升时间和调整时间虽有所增加,但是超调量却大幅度降低。
2)相对于开环控制,正交优化的PID控制在调整时间上增加了1~2s,平均角度相对误差减小4%左右,平均位置误差减小50%左右;相对于正交优化的PID控制,模糊PID控制在调整时间上有少量减少,平均角度相对误差减小2%左右,平均位置误差减小30%左右。这项研究表明了在正交优化基础上的模糊PID控制能更大程度的提高系统的准确性和稳定性。
猜你喜欢
机电工程技术(2021年3期)2021-09-10
环球时报(2019-07-18)2019-07-18
中国测试(2018年9期)2018-05-14
现代职业教育·中职中专(2018年7期)2018-05-14
现代职业教育·中职中专(2018年7期)2018-05-14
神州·中旬刊(2017年1期)2017-06-28
中小企业管理与科技·下旬刊(2009年8期)2009-12-31
现代电子技术(2009年13期)2009-08-31
