智能楼道运输机器人的设计与研究①
2020-07-22 08:32顾振超常浩窦岩蒋鑫沈永楠张凤草
科技创新导报 2020年15期
顾振超 常浩 窦岩 蒋鑫 沈永楠 张凤草
(常熟理工学院 江苏常熟 215500)
本文主要研究并解决在无电梯建筑楼道中重物的运输问题,在现有爬楼机械装置的基础上进行改良升级,实现自动化、智能化、安全化,减少人力搬运过程中风险,保证重物的完好性,利用智能手段提高运输效率,机器想要将货物运输到指定楼层只需要在与机器连接的电脑中输入要到的楼层便可实现。
1 智能楼道运输机器人整体结构设计及工作原理
1.1 运输机器人整体结构连接
楼道机运输机器人包括壳体(受力部分)、链条、升降轮、载物箱、液压伸缩杆、电子控制箱、连接板(滑槽,T型支撑杆)、连接轴、电机、主齿轮、支撑脚等部分,电机主轴连接大齿轮,大齿轮连接外部的链条,同时连接轴上连接支撑脚,保证爬楼过程平稳。上部载物台有四个液压缸控制升降,底部安装应变片式压电传感器,检测重量,确保载物台加紧重物。
1.2 运输机器人上部载物台的设计
货物放入,电子控制箱内部处理器检测到重量并计算相应数据,控制液压杆调节合适的高度,使之受力最小,随着楼层不断升高,且伴随一定的震动通过电子控制箱的平衡器调整液压杆的伸缩,防止机器的翻到,载物箱内部柔软材料,防止在运输过程损坏。
1.3 运输机器人下部底盘的设计
底座上下楼机构实现机器的爬楼、下楼功能。上楼时两个电机带动四个主齿轮运行与部分链节发生相对运动,外侧连接板外边设有滑槽,T型支撑杆底部沿着滑槽运动,其顶部的两头与支撑脚连接,支撑脚内部中央的突起在安装时插入外链两侧的孔中,所以电机带动齿轮带动链带动支撑脚从而实现爬楼运动,从而使得机器结构紧密,运动效率高。下楼时只需一个电机驱动,即可实现下楼。
1.4 整体结构设计及实施方式
装载货物时,将货物放到机器面前,开机,机器通过电子控制箱中感应装置检测到货物,并且控制液压伸缩杆上升或下降达到合适高度,再由工作人员将货物放平到载物箱中,货物入箱,通过液压伸缩杆感应到的重量,传入电子控制箱,再反馈到内置系统中计算出托起货物最省力时的力矩,控制液压伸缩杆三杆的伸长压缩量达到所需要的力矩。在由工作人员将载物箱的两侧门锁住防货物滑落。
机器爬楼过程,首先通过芯片将行走路线传入电子控制箱中,并控制行走方向,机器从开始按照路线行走,运行过程中电机带动主齿轮与链条形成传动,从而带动支撑脚运动,部分支撑脚登入阶梯高层实现攀爬,部分支撑脚依旧的阶梯底层起到支撑作用。在遇到楼层与楼层间的转角时,电子控制箱中检测器检测到前方无台阶,控制升降轮放下,撑起机器从楼梯转角过渡区爬上,完成下一步工作。到达地点后,电机停止,液压伸缩杆下降,工作人员将货物取下搬入屋中。
2 控制系统的设计
2.1 楼道运输机器人的控制系统设计
本设计整体控制有底部的控制箱进行控制。电子控制箱内部有微型处理器,检测装置,语音装置,控制器,摄像头等,由操作人员通过手机,发出信号电子控制箱接受控制器运行启动电机。
控制箱在开机后开始工作,在搬运的过程中,在上部载物台下的设有应变片式压力传感器, 在载物台支撑脚底部贴有应变片, 载物台放入重物时会因为载物台的倾斜角度和重力的作用往下移动, 最终移动到处于最底部的应变片上。通过桥式电路法测得应变片阻值的,反馈至处理器,通过电阻值的变化确定上方重物重量,再次发出信号,传递至控制工作台升降台装置,提升至合适高度。进一步,信号控制载物台控制四周挡板,加紧货物。通过单片机与物联网、互联网连接可以通过手机中APP进行实时控制与监测。
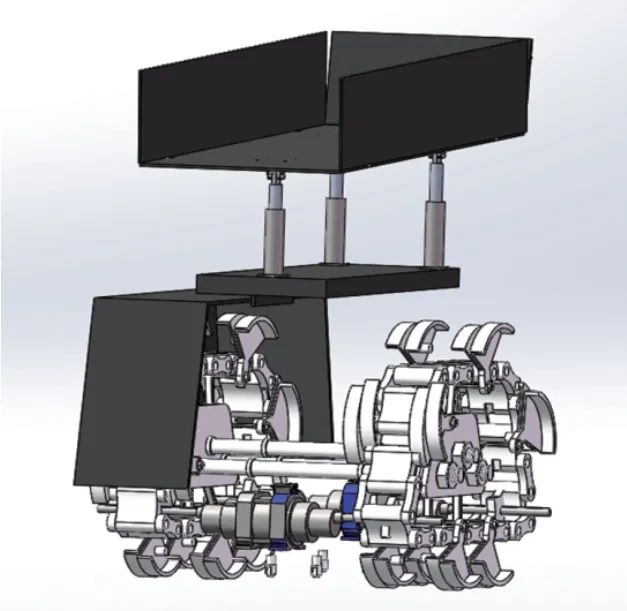
图1 智能楼道运输机器人示意图
运输机器人的底盘在爬楼时由上拉电阻作为输出端连接GPIO端口,单片机监测相应端口的电平,当机器人在前进攀爬,单片机测出高电平,从而对电机执行控制动作,促使电机旋转。电机与前轮的转轴的齿轮连接。当电机转动,电机输出轴的齿轮与转轴啮合转动,带动链传动,从而带动支撑脚进行攀爬运动。
在方向导航的应用中,移动物体需要对实时的航向数据与目标之间的偏差E进行纠正。对于处在楼梯面上,依靠面接触的搬运机器人底盘来说,建立精确的数学模型较为困难,无法抑制由于不稳定因素所带来的系统误差,抗抗干扰性差,而结合现代控制理论中的模糊自适应控制,能够在线识别姿态的特征参数,实时改变控制策略,使参数保持在合理的范围内。抗干扰性差,而结合现代控制理论中的模糊自适应控制,能够在线识别姿态的特征参数,实时改变控制策略,使参数保持在合理的范围内。
检测装置,检测路况,当有人通过时,电动机进行反转,进行减速,停止工作,发出信号给处理器,处理器输出信号给语音装置,语音提示让行人先通过,防止误伤。全程摄像头时刻关注前方到路是否畅通,保证能够正常前行。
在遇到楼层与楼层间的转角时,控制箱中检测器检测到前方无台阶,检测器发出电信号至处理器,处理器发出信号,控制升降轮放下,撑起机器从楼梯转角过渡区爬上,完成下一步工作。到达地点后,电机停止,液压伸缩杆下降,工作人员将货物取下搬入屋中。
3 结语
如今的社会上,我们的社会上智能机器人行业已经逐渐发展起来,传统运输靠人力,存在着许多问题,如今靠运输机器人,你可以轻松地将大部分物品,例如冰箱,洗衣机等偏重的物体轻松搬上楼和下楼,这样可以节约很多时间,运输效率也提高了不少,对于解决楼道问题有重大的意义。
猜你喜欢
新能源科技(2022年8期)2022-11-22
新能源科技(2021年12期)2021-04-02
新教育论坛(2019年14期)2019-09-10
机械设计与制造(2018年2期)2018-03-05
青岛画报(2018年1期)2018-02-23
中国修船(2015年5期)2015-11-25
电子世界(2014年23期)2014-10-21
计量技术(2013年10期)2013-05-14