
附加惯性项神经网络云台自抗扰控制研究
2020-08-04 12:27刘欣罗晓曙
现代电子技术 2020年3期
关键词:RBF神经网络
刘欣 罗晓曙


摘 要: 针对自抗扰控制器参数较多且不易整定的缺陷,以三轴增稳云台内框为研究对象,提出一种附加惯性项神经网络云台自抗扰控制方法。该方法首先通过添加附加惯性项的RBF神经网络对被控对象进行辨识,从而获得单神经网络自学习需要的Jacobian信息,然后将扩展的积分系数、非线性误差反馈控制律中的比例系数和微分系数作为单神经元的权重,利用单神经元的自学习能力改进自抗扰控制器。仿真结果表明:加入神经网络的自抗扰控制器具有较好的鲁棒性,与参数固定的常规自抗扰控制器相比具有更高的精度和更快的响应速度。
关键词: 神经网络云台; 自抗扰控制; RBF神经网络; Jacobian信息; 收敛速度; 鲁棒性测试
中图分类号: TN876?34; TP273 文献标识码: A 文章编号: 1004?373X(2020)03?0154?04
Research of tripod head active disturbance rejection control
based on neural network with additional inertia item
LIU Xin, LUO Xiaoshu
(College of Electronic Engineering, Guangxi Normal University, Guilin 541004, China)
Abstract: In view of the defects that there are too many parameters for the ADRC (Active Disturbance Rejection Control) and it is difficult to adjust them, a method of tripod head active disturbance rejection control based on neural network with additional inertia item is proposed. The inner frame of the triaxial stabilizer is taken as the research object in the research. In the method, the controlled object is identified by adding RBF (Radial Basis Function) neural network with additional inertia item to obtain the Jacobian information needed by single neural network self?learning, and the extended integral term coefficient, the proportional coefficient and differential coefficient in the NLSEF (Nonlinear State Error Feedback) control law are taken as the weights of single neuron, and then the self?learning ability of single neuron is used to improve the ADRC. The simulation results show that, in comparison with the conventional ADRC with fixed parameters, the ADRC with neural network has better robustness, higher accuracy and faster response.
Keywords: neural network tripod head; ADRC; RBF neural network; Jacobian information; convergence rate; robustness test
0 引 言
三轴增稳云台是保证获得高质量影像的重要装置[1?3]。传统的云台控制系统采用经典的PID控制,但在复杂的环境中,由于外扰突变,传统的PID不能很好跟踪突变量的变化,造成控制系统控制精度下降和响应速率减慢[4]。文献[5]提出将自抗扰控制器(Active Disturbance Rejection Control,ADRC)应用于三轴机载增稳云台的控制系统,验证了ADRC比PID具有跟踪速度更快,抗扰能力更强等优点,但未克服ADRC参数较多难以整定的缺陷。文献[6]提出了一种采用BP神经网络对自抗扰控制器中的非线性扩张状态观测器进行参数整定的方法,应用于机载光电稳定平台控制,显著地提高了扰动隔离度。
本文首先采用RBF神经网络对被控对象进行辨识,从而获得单神经元自学习需要的Jacobian信息,以实现参数自整定;通过添加附加惯性项加快RBF神经网络的收敛速度,提高Jacobian信息的近似程度;然后使用单神经元改进ADRC的非线性状态误差反馈(Nonlinear State Error Feedback,NLSEF),通过在NLSEF中增加扩展的积分项,并将此扩展的积分项系数、NLSEF中的比例系数和微分系数作为单神经元的权重,构造具有参数自整定的改进自抗扰控制器,应用于增稳云台控制系统,以期提高控制精度和响应速度。
1 云台伺服系统动力学方程
三轴增稳云台在空间结构上由三个互相独立且互相垂直的框架构成,具有三个方向的自由度且三个轴的工作原理基本相同,结构上主要由外框、中框、内框组成[7]。以用于搭载相机的内框为例,建立其伺服系统动力学方程为:
式(1)可转换为状态方程,如下式所示:
式中:[Km]为电机力矩系数;[Ce]为电压反馈系数;[J]为三轴云台内框的转动惯量;[R]为电枢电阻;[Ku]为PWM功率放大器放大系数;[u(t)]为控制输入;[x1t=θt],为伺服电机转角;[x2t=θt]为伺服电机转速。
2 自抗扰控制理论
文献[8]分析并指出ADRC可以实现跨阶控制,扩张观测器(Extended State Oberver,ESO)输出的二阶导数不加入外环的非线性组合仍然能保证系统的稳定性。ADRC主要由跟踪?微分器、扩张状态观测器、非线性状态误差反馈三部分构成[9]。
以下为非线性状态误差反馈方程:
式中:[θ′d]是指令的跟踪,即安排的过渡过程;[θd]是指令的近似微分;[β1]和[β2]是NLSEF两个控制参数,类似于PD控制中的[kp],[kd];[z1]是输出信号的估计;[z2]是输出信号微分的估计;[z3]是总扰动的估计;[fal(?)]是非线性函數,其余各参数及各函数的具体意义参见文献[10]。
3 基于附加惯性项的RBF神经网络的云台动力学系统辨识
RBF神经网络是具有单隐含层的3层前向网络,而且是局部逼近的网络,学习速度快且能克服局部极小值等问题,能满足实时控制的要求。结合特定被控对象,经反复试凑选取输入层节点数为3、隐含层节点数为5,输出层节点数为1的RBF神经网络。
令被控对象第[k]时刻的输出为[θ(k)],神经网络的输出为[ym],取辨识器的性能指标函数为:
根据梯度下降算法,输出权值[w]、节点基宽参数[b]、节点中心[c]的迭代算法如下:
式中:[i=1,2,3];[j=1,2,3,4,5];[η]为学习速率;[α]是动量因子;[β]是附加惯性项系数;其余各参数及函数的具体意义参见文献[8]。
将被控对象的输出对输入的敏感度称为Jacobian信息,其值可以通过RBF神经网络在线辨识获取,其算法为:
4 附加惯性项神经网络云台自抗扰控制方法
附加惯性项神经网络改进自抗扰控制器主要由RBF神经网络辨识器(RBF Neural Network Identifier,RBFNNI)、跟踪?微分器、扩张状态观测器、改进的非线性状态误差反馈四部分构成,其结构如图1所示。其中,[z-1]是延迟算子。RBFNNI对被控对象进行辨识,从而获得改进的NLSEF中的单神经元自学习所需要的Jacobian信息。
扩张状态观测器对总扰动估计的速度与精度会影响到补偿后的系统与理想“积分串联标准型”的接近程度。本文提出在NLSEF中引入扩展的积分项,以期减小当扩张状态观测器不能完全实时准确地估计总扰动时系统稳态误差。通过将[θe]和[θe]进行状态转换,得到NLSEF的比例项[x1(k)]、微分项[x2(k)]、扩展的积分项[x3(k)],再将[x1(k)],[x2(k)],[x3(k)]作为单神经元的输入,控制参数[βi(i=1,2,3)]作为单神经元的权重,以此构造改进的非线性状态误差反馈,各控制参数可以通过单神经元的自学习功能进行自整定,其结构如图2所示。
其中:
式中:[G]是增益系数,需适当选取;[α5]可选取为大于[α4]的数。
取性能指标函数[Je=0.5e2(k)]。加权系数的调整量为:
单神经元权值更新迭代算法如下:
式中:[η1],[η2],[η3]为加权系数对应的学习速率;[?ym(k)?u(k)]为RBF神经网络在线辨识获取得到的Jacobian信息;[σ]是动量因子。
5 仿真及结果分析
为研究基于附加惯性项神经网络云台自抗扰控制的性能特点,依次使用常规ADRC、神经网络改进ADRC分别在Matlab仿真环境中进行仿真分析。选取ADRC参数如下:[h=0.001],[h0=0.001],[δ1=0.002 5],[α1=0.5],[α2=0.25],[δ2=2h],[α3=0.75],[α4=1.5],[α5=2]。给定正弦信号指令为[θd(t)=sin(2πt)],观察并对比系统在常规ADRC控制下和本文提出的改进ADRC控制下的正弦响应。
系统在常规ADRC控制下的正弦响应如图3所示,位置跟踪误差曲线最大峰值为0.08 rad。基于附加惯性项神经网络改进ADRC控制的正弦响应如图4所示。位置跟踪误差曲线最大峰值稳定在0.035 rad,这是因为当ESO不能完全实时准确地估计总扰动时,扩展的积分项减小了稳态误差,神经网络的引入提高了ADRC的自适应性,所以本文提出的改进ADRC具有较常规ADRC更高的精度。
图5显示添加附加惯性项RBF网络比未添加附加惯性项的RBF网络具有更快的收敛速度,可以到更好的逼近效果,能够提高Jacobian信息的近似度。
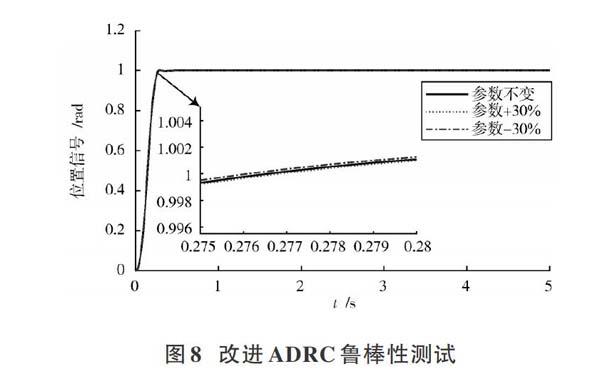
图6为在指令为单位阶跃信号时,单神经元各权重自适应调整曲线。图7和图8为系统的鲁棒性测试,实验方法是将转动惯量增加和减少30%,测试系统的单位阶跃响应。由于ADRC本身就具有较好的鲁棒性,所以两者的鲁棒性从整体上看差别不大。由局部放大对比可知,两者的超调量均约为0.2%,常规ADRC的上升时间为0.284 s,改进ADRC上升时间为0.276 s,在超调量相同的情况下改进ADRC比常规ADRC具有更快的响应速度。
6 结 语
本文以三轴增稳云台内框为研究对象,利用神经网络的自学习能力对常规自抗扰控制器进行改进,提出一种附加惯性项神经网络云台自抗扰控制方法,实现了具有参数自整定能力的改进ADRC,减少了控制器调整参数,提高了ADRC的自适应性。仿真及实验结果表明,该控制器具有较好的鲁棒性,与参数固定的常规ADRC相比具有更高的精度和更快的响应速度,具有较好的工程应用价值。
参考文献
[1] 郭炳坤,陈水利,吴云东,等.无人机三轴稳定云台的模糊PID控制[J].集美大学学报(自然科学版),2013,18(4):308?313.
[2] 林峰,王晓晓,曲晓光.四旋翼无人机航拍云台的控制系统设计[J].沈阳航空航天大学学报,2016,33(5):55?60.
[3] 王日俊,曾志强,党长营,等.一种基于STM32的机载惯性稳定云台的设计[J].现代电子技术,2018,41(12):145?148.
[4] 冯志刚,舒林.基于ARM的航拍三轴云台控制系统设计与研究[J].沈阳航空航天大学学报,2017,34(3):70?75.
[5] 要亚忠.三轴机载增稳云台ADRC控制的研究及应用[D].哈尔滨:哈尔滨工业大学,2017.
[6] 朱启轩,张红刚,高军科.光电稳定平台神经网络自抗扰控制方法[J].电光与控制,2018,25(3):10?14.
[7] 舒林.基于ARM的航拍三轴云台控制系统设计与研究[D].沈阳:沈阳航空航天大学,2018.
[8] 王涛,杨晓萍,余向阳,等.基于神经网络的水轮机调节系统自抗扰控制[J].水力发电学报,2006,25(3):125?129.
[9] 任潞,何屏,张晓磊,等.基于PSODE混合算法优化的自抗扰控制器设计[J].现代电子技术,2017,40(3):92?95.
[10] 孙金秋,游有鹏.基于线性自抗扰控制的永磁同步电机调速系统[J].现代电子技术,2014,37(16):152?155.
猜你喜欢
计算机时代(2017年2期)2017-03-06
商情(2016年46期)2017-03-06
科教导刊·电子版(2016年26期)2016-11-21
科教导刊·电子版(2016年27期)2016-11-18
科教导刊·电子版(2016年25期)2016-11-16
电脑知识与技术(2016年25期)2016-11-16
科技视界(2016年18期)2016-11-03
电脑知识与技术(2016年7期)2016-05-19
企业导报(2016年6期)2016-04-21
现代电子技术(2015年21期)2015-11-09
