单片机技术在智能小车避障循迹系统设计中的应用
2020-08-14 09:48冯乔
现代信息科技 2020年8期
摘 要:提出了智能小车避障循迹系统总体设计思路,并进而分析了智能小车避障循迹系统硬件设计,提出有效设计驱动模块、主控制模块、伺服电机模块、避障模块、循迹传感器、循迹系统设计,提出优化系统软件设计,从硬件设计与软件系统运行两个角度进行研究,由此论证智能小车避障系统设计过程中单片机的运用方式,要求有效设计智能机器人基本动作,实现智能小车循迹功能,为智能小车避障循迹系统设计提供了一定参考意见。
关键词:单片机技术;智能小车;避障循迹系统;伺服电机模块
Abstract:The overall design ideas of the intelligent car obstacle avoidance tracking system are proposed,and then the hardware design of the intelligent car obstacle avoidance tracking system is analyzed,and the effective design of the drive module,main control module,servo motor module design,obstacle avoidance module,tracking sensor,tracking system design,proposed optimization system software design,researched from two perspectives of hardware design and software system operation,thus demonstrating the use of single-chip microcomputer in the design process of intelligent car obstacle avoidance system,which requires effective design of basic actions of intelligent robots to achieve intelligence car tracking function provides a certain reference for the design of the intelligent car obstacle avoidance tracking system.
Keywords:single chip microcomputer technology;intelligent car;obstacle avoidance tracking system;servo motor module
0 引 言
在目前信息技术快速发展的背景下,机器人研究成为国际上多个国家研究的重要课题之一,研究以机器人取代人工劳动是目前相关信息技术发展的重要方向之一。智能小车是机器人研究的重要项目之一,本文运用单片机技术提出智能小车避障循迹系统的设计与选择过程,智能小车达到了良好的运行效果。
1 智能小车避障循迹系统总体设计
人工智能机器人目前在多项领域中均有运用,研究过程受到理论界的广泛关注,在设备检测与货物搬运过程中可以运用机器人完成,在智能小车行驶过程中,要求能够沿着系统设定的路线行驶,并正确避开障碍物。为了达到良好的运行效果,要求积极加强系统的总体设计。在无锡工艺职业技术学院单片机相关理论研究与教学进行过程中,对单片机在智能小车循迹避障系统中的运用有了更深的理解与体会。
本次利用单片机技术进行智能小车避障系统设计过程中主控芯片为STC89C52单片机,小车行驶信息与路况信息收集方面运用LCD显示器,小车与障碍物之间的距离测量上运用超声波测距进行测量,小车的行驶速度与行驶方向,可以通过主控系统进行反应与体现,小车运行过程中能够自动地辨识障碍物,并以此指导小车的行驶行为,使得小车能够沿着水平方向行驶。
STC89C52单片机设计与运行过程中能够在LCD显示模块中表现出智能小车的行驶速度与行驶方向,在综合收集多项数据的前提下正确分析路况信息,并准确避开障碍物,使得小车最终能够沿着直线行驶。
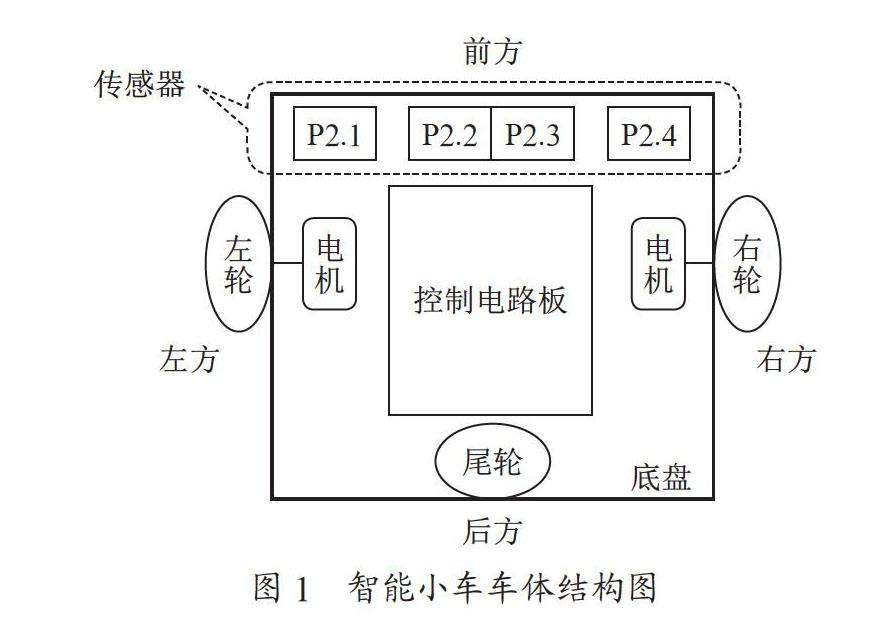
本次在运用单片机进行智能小车避障系统设计过程中,系统的主要构成包含了避障、前进、液晶显示模块、主控制模块、传感器模块、循迹感测模块、转弯控制电机、底部部件等部分。智能小车车体结构如图1所示。
本次智能小车避障循迹系统设计过程中选择AT89S52单片机,并据此设计了相应的时钟电路、传感器模块、电源模块、复位电路、伺服电机模块等,不同模块对系统运行发挥着不同作用。智能小车在黑色軌迹路线上行驶时需要依靠传感器模块,小车基本动作的完成方面则需要依靠伺服电机模块。智能小车为了能够灵活循迹采用了三轮结构车体,在小车运行过程中要求能够优化硬件设置与软件设置[1]。
2 智能小车避障循迹系统硬件设计
2.1 设计驱动模块
系统运行过程中以电机来带动,在对系统运动方向的把握上则采用电机的正转与反转来实现,行进中的路况信息能够反映在单片机之中。H桥式驱动电路是系统运行过程中一般采取的主要电机驱动,本文研究中运用的系统采用的同样是H桥式驱动电路,属于L298N内部集成运行方式。在小车启停与速度的掌握上则运用L298N电路PWM信号进行指导,单片机能够对此做出相应控制与指导[2]。
2.2 设计系统主控制模块
主控制模块是系统运行过程中的重要根基,本次智能小车避障循迹系统运行中的主控制模块选择8位微控制器STC89C52单片机,对系统运行中的各个层面进行指导。此次设计中的避障方案选择超声波-光电接近开关避障方案,STC89C52的I/O口能够有效收集并处理系统运行中的多种信号,以此优化避障系统中的多个路径,电机控制信号通过P0口输出,以此对小车运行起到良好的运动指导效果[3]。
2.3 优化伺服电机模块设计
本次设计过程中伺服电机模块选择360°伺服舵机,以此使得循迹系统在运行过程中能够准确掌握路况,获取较为连续的数据信息,从而进行有效的速度管理与控制。360°伺服舵机具有三条输入线,分别是红、黑、白,其中红色负责伺服机电源,黑色负责伺服机接地,白色负责伺服机的信号控制。伺服电机模块运行过程中为了加强对小车的有效控制,在伺服电机模块运行过程中安装了一个比较器和一个基准电路[4]。
2.4 设计避障模块
智能小车避障循迹系统设计中的核心技术为避障系统,也是系统运行中最为核心的模块,构成了智能小车运动控制中最为核心的技术,系统运行优劣情况的重要评价指标之一是避障系统。本次避障过程中采用HC-SR04超声波模块,在2 cm~400 cm非接触式距离中能够进行准确测距,具有3 mm的测距精度,运行效果较为显著。使用过程中既符合了系统运行要求,同时其抗干扰性能与精度也相对较高。避障模块的构成部分包括接收器、超声发射器、控制电路等部分。小车运行过程中避障模块能够有效处理地面上一些不可穿越的障碍,对此进行正确判断,并给出相应的应对之策。
2.5 设计循迹传感器
传感器设置过程中主要是基于循迹传感器模块的设置,设置过程中采用了红外传感器方式,以此能够促进反射光强度的吸收,以此探测不同颜色的物体,由此QTI传感器能够接收到系统运行中不同的电平信号,优化智能小车的运行,在智能小车避障系统与循迹系统设计过程中能够有效接收不同信号,并对此进行有效处理[5]。
小车循迹避障系统设计过程中要求优化伺服机电模块,其中重要设计内容之一为循迹传感器设计,要求优化传感器设计。本次智能小车循迹传感器设计过程中采用了QTI传感器,为红外线传感器,运行过程中能够接收不同的反射光强度,以此探测小车行进过程中的物体,并探测得到的数据输出为不同的电平信号。以此为智能小车避障系统提供数据支持依据。
2.6 优化小车循迹系统设计
小车运行中的循迹系统则是采用红外探测法,智能小车运行过程中必然会遇到不同的物体,而不同颜色的物体表面通过红外线能够具有不同的反射规律,通过对此信息的整合能够正确判断出智能小车运行过程中面对的不同物体。本次系统设计中采用TCRT5000型光电对管进行探测与循迹,运行流程为小车运行过程中向前方发射红外光,在遇到白色地面时出现漫反射现象,智能小车上安装了接收管,能够在第一时间接收发射光。而在遇到黑线的情况下则能够被黑线吸收,此时智能小车上不会接收到任何信号。为了加强对小车运行过程中的信号检测,运用高低电平的操作方式,通过LM324来实现,以此达到良好的循迹效果[6]。
在循迹系统设计完成之后,要求不断优化小车循迹策略,安装QTI传感器,此次设计与运行过程中有效连接了智能小车平台I/O口与QTI传感器SIG信号线,使得系统运行过程中能够针对不同的系统采用不同颜色的信号线,以此能够促进智能小车运行过程中可能出现的错误,建立良好的错误排查方式,并针对出现的错误采取有效的应对处理措施。在智能小车运行过程中,在对传感器信号控制方面建立了两级方向控制方式,能够有效接收到传感器信号,并对其进行有效处理。最终在两级系统支持之下,有效控制智能小车的运行轨迹,并对其中可能出现的错误及时纠正,通过这一方式的实施显著提升了智能小车的循迹性能。
3 优化系统软件设计
软件设计是智能小车避障系统设计过程中的重要因素之一,以此优化智能小车的软件运行,有效设计智能机器人基本动作,实现智能小车循迹功能。
3.1 设计智能机器人基本动作
在设计智能机器人基本动作过程中,要求能够结合智能小车运行过程中轮子的旋转情况,并以此优化智能小车循迹系统设计。从左轮角度看,智能小车行进时为逆时针方向旋转,而从右轮角度看则为顺时针旋转。由此能够判断出小车行驶速度与行驶方向,因此为了在运行过程中对小车进行加速与减速控制与管理,应当对小车车轮进行有效设置。并将这一设计理念反映在小车的C语言的设计过程之中,并以right与left表示,以此完成智能机器人的基本动作设计,优化智能小车循迹系统设计。
3.2 实现智能小车循迹功能
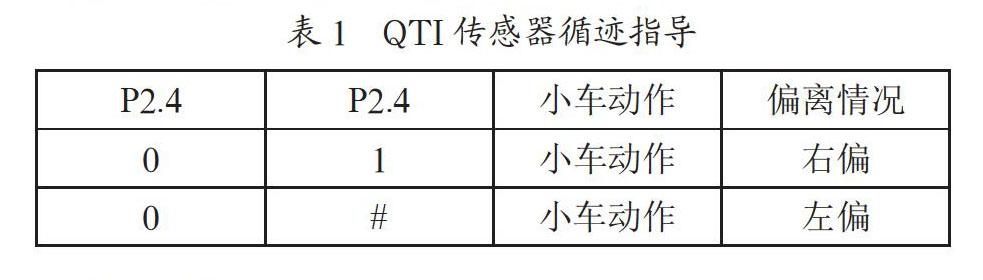
智能小车软件系统设计过程中要求积极优化避障循迹功能,应当对智能小车运行建立QTI传感器循迹策略表,以此在智能小车的自主循迹过程中运用move函数,表1体现了QTI传感器下智能小车运行的循迹局部策略。通过这一局部策略的运用能够扩展小车的其他运行方式。
4 结 论
本文提出了单片机智能小车避障循迹系统设计中的硬件设施与软件设施,硬件设计过程中要求有效设计驱动模块、设计系统主控制模块、优化伺服电机模块设计、设计避障模块、设计循迹传感器、优化小车循迹系统设计。要求不断优化智能小车的软件运行,有效设计智能机器人基本动作,实现智能小车循迹功能。
在实际的测试运行过程中取得了良好的运行效果,所设计的智能小车达到了良好的识别效果,小车运行的稳定与可靠性较为良好。但是在实际具体运行过程中可能会出现抖动厉害或者无法循线现象,这主要是由于QTI传感器的安装高度问题。在智能小车以较高速度行驶过程中可能会出现突然翻车现象。小车行进时需要设置引导线,引导线的颜色要求適宜,在颜色较淡时会影响循迹系统的正常运行,在设计过程中要求充分考虑到这一问题。
参考文献:
[1] 寸巧萍.基于Mega16单片机的智能小车循迹避障设计方案 [J].电子技术与软件工程,2015(18):258.
[2] 申扣明,杨国平.基于单片机技术的自动循迹避障寻光智能小车系统设计 [J].自动化应用,2018(9):75-76+82.
[3] 孙艳龙,秦畅.智能小车上也有超声波测距避障技术的身影 [J].中国航班,2019(3):41-42.
[4] 张伟.基于C51单片机的搬运机器人控制系统设计 [J].漳州职业技术学院学报,2019,21(1):92-94.
[5] 曾祥苹,栗江,刘兴教.火龙果采摘用轮式AGV行走系统导航避障策略研究 [J/OL].机床与液压.(2019-07-31).http://www.jcyyy.com.cn/tg/jcyyy/ch/reader/view_abstract.aspx? flag=2&file_no=201907310000009.
[6] 李毓川.一种具有完整性约束智能小车运动控制的实现 [J].电子测量技术,2018,41(10):29-34.
作者简介:冯乔(1981—),女,汉族,江苏宜兴人,实验师,工程硕士,研究方向:单片机、嵌入式等控制技术。
猜你喜欢
电子技术与软件工程(2017年1期)2017-03-06
中国新技术新产品(2017年2期)2017-01-20
电子技术与软件工程(2016年22期)2016-12-26
科技创新与应用(2016年34期)2016-12-23
科教导刊(2016年27期)2016-11-15
电脑知识与技术(2016年18期)2016-11-02
电脑知识与技术(2016年22期)2016-10-31
考试周刊(2016年64期)2016-09-22
电脑知识与技术(2016年17期)2016-07-23