
永磁同步电动机模糊神经网络控制系统仿真研究
2020-08-31 05:42徐大利谢青海崔嵬王涛孟凤果
机电信息 2020年20期
关键词:鲁棒性
徐大利 谢青海 崔嵬 王涛 孟凤果


摘要:永磁同步电动机驱动系统速度控制器多采用参数固定的PI控制器。模糊控制推理方式类似于人的思维模式,神经网络具备良好的自适应学习能力,将模糊逻辑与神经网络相结合,设计了一种模糊神经网络速度控制器。通过仿真实验,结果表明,所设计的系统速度控制器性能良好,具有较强的鲁棒性。
关键词:模糊神经网络;永磁同步电动机;鲁棒性
0 引言
传统的永磁同步电动机(PMSM)驱动系统中,速度控制器采用参数固定的控制器,如比例积分控制器(PI)。永磁同步电动机的设计参数对控制系统影响较大,由于模糊控制推理方式类似于人的思维模式,已有相关文献将模糊控制器应用于PMSM驱动系统中[1-2]。同时,神经网络具备良好的自适应学习能力,所以在PMSM驱动系统的理论研究中,相关文献将神经网络控制器应用于永磁同步电动机的控制系统中[3]。神经网络虽然具备良好的自适应学习能力,但是不适于表达基于规则的知识[4]。因此,本文将模糊逻辑与神经网络结合起来,选取其各自的优点,设计了模糊神经网络速度控制器,用于控制PMSM驱动系统。通过仿真实验,结果表明,所设计的系統速度控制器性能良好,具有较强的鲁棒性。
1 自适应模糊神经网络控制器原理
自适应模糊神经网络共分5层:第1层为输入层;第2层为隶属度函数表达层;第3层为模糊规则表达层;第4层实现的是归一化计算;第5层为输出层,实现的是清晰化计算,即:
在电动机运行过程中,当实际转速与设定转速一致时,模糊神经网络的输出按照前一个时刻的参数计算得出。否则,便会按照上述算法对其进行在线调整。
2 仿真实验
基于对原理的分析,模糊神经网络速度控制器的实现方式如下:
用C++语言编写模糊神经网络程序,通过采样实验采集程序训练所需的原始数据。将原始数据输入模糊神经网络程序,离线训练,从而得到模糊神经网络速度控制器的初值。
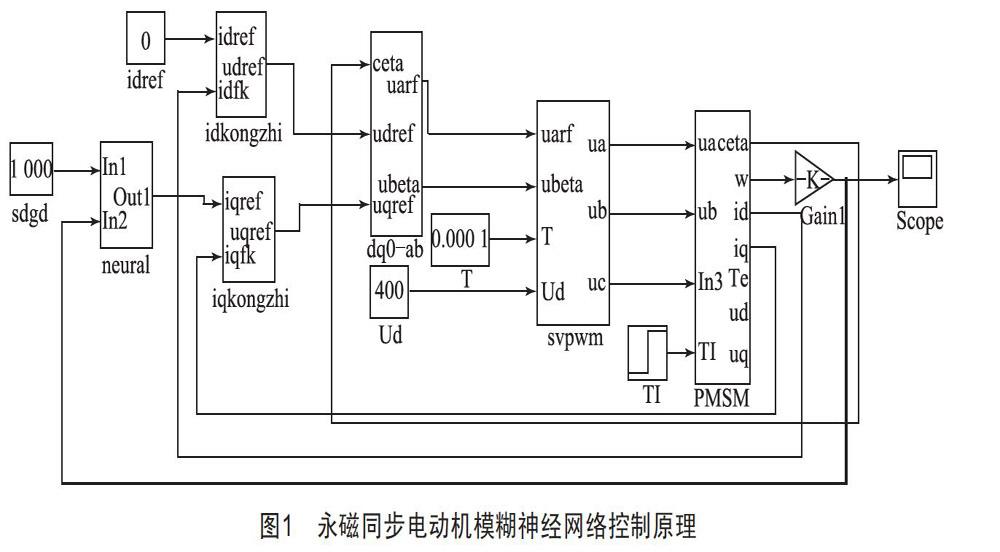
电动机仿真实验采用矢量控制方案,永磁同步电动机模糊神经网络控制原理如图1所示。
电动机参数为:定子电阻Rs=0.618 Ω,直轴电感Ld=0.007 418 H,交轴电感Lq=0.012 285 H,转子磁链ψf=0.112 8 Wb,转动惯量J=5.59×10-4 kg·m2,极对数pn=2。给定不同的初始速度观察系统的速度响应曲线,仿真实验条件为:负载0.2 Nm启动,0.5 s时负载突增为1 Nm。给定转速分别为500 r/min、1 000 r/min、1 500 r/min,其速度响应曲线分别如图2、图3、图4所示,分别从3个性能指标方面(稳态时刻、超调量和负载突变速度变化幅值)对仿真结果进行了分析,仿真实验结果如表1所示。
在3种给定速度下,永磁同步电动机模糊神经网络控制器的实际速度均能很快跟踪上给定转速(稳态时刻最大仅为0.016 5 s),而且超调量很小(最大超调量为1.8%),这说明所设计的控制系统性能良好。
3 结语
本文将模糊逻辑与神经网络结合起来,选取其各自的优点,设计了模糊神经网络速度控制器,用于控制PMSM驱动系统。通过仿真实验,结果表明,所设计的系统速度控制器性能良好,具有较强的鲁棒性。
[参考文献]
[1] UDDIN M N,RAHMAN M A.Fuzzy logic based speed control of an IPM synchronous motor drive[J].Electrical and Computer Engineering,1999,4(3):1259-1264.
[2] 武瑞兵,王淑红.基于S函数的永磁同步电动机模糊控制系统研究.微电机,2008(2):32-35.
[3] 王军,肖建.永磁同步电动机自适应神经网络IP位置控制器[J].电机与控制学报,2005(6):525-528.
[4] 孙增圻,邓志东,张再兴.智能控制理论与技术[M].北京:清华大学出版社,2007.
收稿日期:2020-06-24
作者简介:徐大利(1983—),男,河北保定人,硕士,讲师,从事电动机控制、电梯电动机控制研究工作。
猜你喜欢
粘接(2022年7期)2022-07-19
科技研究·理论版(2021年22期)2021-04-18
科技与创新(2017年1期)2017-02-16
软件(2016年6期)2017-02-06
计算机应用(2016年12期)2017-01-13
电脑知识与技术(2016年28期)2016-12-21
汽车科技(2016年5期)2016-11-14
科教导刊·电子版(2016年23期)2016-10-31
科技视界(2016年16期)2016-06-29
电脑知识与技术(2016年9期)2016-05-18
