高维多目标极值优化算法的中点钳位型三电平逆变器设计方法*
2020-09-01 05:24李民英戴瑜兴
电器与能效管理技术 2020年7期
李民英, 陈 宇, 戴瑜兴,2
(1.广东志成冠军集团有限公司, 广东 东莞 523718;2.湖南大学, 湖南 长沙 410082)
0 引 言
近年来,我国和欧美发达国家在高压直流输电、高压变频调速、大功率新能源电力系统、大型机载牵引、大型冶炼、港口船舶岸电等应用领域的高速发展对高性能大容量电力电子系统有着迫切的需求[1],而多电平变换系统已逐渐成为大容量电力电子系统中高压应用场合的首选方案[2-5]。模块化多电平变换系统作为一种新型的多电平变换系统,不仅继承了传统级联式多电平变换系统在器件数量高度模块化结构方面的优势,同时还在器件电流能力、不平衡运行能力、故障穿越和恢复能力等多方面具有独特的优势,因此近年来受到了学术界和工程应用界广泛的研究与应用[6-7]。但总的来说,模块化多电平变换系统在理论分析、针对不用性能指标要求的脉宽调制、直流电容电压平衡控制、环流抑制和故障保护等领域还有待进一步完善。特定谐波消除技术 (Selected Harmonics Elimination Pulse Width Modulation,SHEPWM)[8]作为一种新颖的调制方法,消除低阶谐波,从而得到具有更佳谐波性能的高质量输出波形,并具有更低的切换频率和计算代价。SHEPWM的以上优点在大容量电力电子系统的设计和运行中显得尤为突出。如何实现模块化多电平变换系统SHEPWM优化调制及实时闭环控制策略已成为实现具有优化输出谐波特性和低开关损耗等高性能大容量电力电子变换系统亟待解决的难题之一[8-11]。
多电平SHEPWM问题的关键在于根据变换器输出相电压的数学模型,如何准确且高效地求解以指定次谐波的幅值等于零为约束条件组成的复杂超越非线性方程组[12]。研究人员早期所采用的牛顿迭代法、同伦算法、Walsh变换法等算法收敛性对初值的选取有较高要求,求解精度难以保证;近年来广泛采用的遗传算法、模拟退火算法、粒子群算法、蚁群算法、蜂群算法、蛙跳算法等智能优化算法[13-14]为多电平变换系统不同拓扑结构SHEPWM研究提供了一种新颖的思路,新近的研究综述[8]对其研究现状与特点进行了系统的总结。但以上这些方法都是首先将SHEPWM消谐模型转为带有权重系数的单目标约束优化问题,再采用各种单目标进化算法进行优化求解,普遍存在基于1/4周期对称的假设过于理想化、性能评价函数过于简单、权重系数难以精准确定、某些特定阶次谐波难以消除、低次谐波的消除可能导致邻近高次谐波幅值和总谐波畸变率增加、计算复杂度高等缺陷,因此通常都只能采用离线计算方式,难以用于实际大容量电力电子系统的实时控制中。迄今为止,仅有少数学者从计算复杂度分析、算法并行实施等方面对多电平变换系统SHEPWM在线优化问题进行了探讨,但采取的优化工具仍然局限于遗传算法、粒子群算法、人工神经网络等单目标优化算法。而多电平变换系统SHEPWM难题本质上是计及多性能指标的高维多目标约束优化问题。目前,已有部分学者将多目标优化算法以及高维多目标优化算法应用到滤波器设计[15-16]、电网经济运行[17]、电磁结构[18]、电价策略[19]等领域,验证了多目标优化算法的有效性。可见,通过高维多目标优化算法解决多电平变换系统SHEPWM难题是一种有效且新颖的方法。
综上所述,本文从高维多目标约束优化新视角进行研究,将SHEPWM难题建立为高维多目标优化问题,采用高效的高维多目标极值优化算法进行优化求解分析。
1 中点钳位型三电平SHEPWM方程组建立
中点钳位型(Neutral-Point-Clamped,NPC)三电平逆变器是多电平逆变拓扑结构最常见的一种结构。NPC逆变器的主电路是由多个开关管串联而成,通过不同的开关组合产生不一样的电平数,能在逆变器的输出端形成相应的正弦波。
NPC三电平逆变器拓扑结构[20]如图1所示。2个相同电容串联,组成了直流侧部分;4个开关管、4个续流二极管和2个中点钳位二极管组成了单相桥臂。图1中,O表示中点,(VTa1,VTa4),(VTb1,VTb4),(VTc1,VTc4)是用来产生PWM输出的开关器件;(VTa2,VTa3),(VTb2,VTb3),(VTc2,VTc3)和VD11~VD32共同起钳位作用,即把桥臂上与其相连点的电位钳到直流电压的中点电位。每相桥臂的4个功率开关管一共可以形成16种开关组合,其中有13种开关状态是无效的,只有3种开关状态是有效的。
由NPC三电平逆变器工作原理可知,A相电压波形如图2所示。
由图2可知,波形满足1/4周期对称,1/2周期反对称。由Dirichlet定理,对其进行傅里叶级数展开:
由于波形为奇函数,则An=0。
(3)
由于波形为奇函数且关于π/2轴对称,则
(4)
式中:Udc——直流侧电源电压;
N——1/4周期开关时刻数。
各谐波赋值为
U(n)=Bn
(5)
其中,必须满足0<α1<α2<…<αN<π/2。在NPC三电平逆变器中,重点消除的谐波次数为5、7、11、13、6i-1,6i+1 (i=1,2,3,…)。由式(5)可知,开关角α1、α2,…,αN决定各谐波幅值。只要选择合适的开关角,就可以使得U(n)=0,实现谐波消除;设基波调制度m=U(n)/Ud/2,消除5、7、11、13、6i-1,6i+1(i=1,2,3,…)次谐波得到:
(6)
下面将介绍如何将SHEPWM非线性方程组转化为特定目标的优化问题,建模成为高维多目标约束优化问题。假设计划消除6i+1次谐波,其SHEPWM方程组已在式(6)中给出。将式(6)转化为对特定目标的优化问题,即
(7)
同时,为了保证输出电压的总谐波畸变率(THD)较低,因此将THD也作为MaOPEO中的特定目标进行优化,即得到第N+1个目标函数
(8)
由于开关角度的约束,将开关角转化为MaOPEO中的约束条件:
(9)
因此由式(7)~式(9)构成MaOPEO算法优化SHEPWM模型。
2 MaOPEO-SHEPWM算法描述
基于MaOPEO算法的NPC三电平逆变器SHEPWM框图如图3所示。开关角α通过MaOPEO算法迭代优化[21],寻找最优的非支配解集,根据MaOPEO算法得到的开关角产生PWM,用来控制NPC三电平逆变电路中的开关器件导通与否,得到输出电压,然后用快速傅里叶分析(FFT)进行分析得到各谐波幅值和THD。
基于高维多目标极值优化算法的特定谐波消除流程图如图4所示。
MaOPEO-SHEPWM求解开关角和获得各谐波分量以及总谐波畸变率的具体步骤。
输入:根据工程需求,输入需要消除的最高谐波次数;参考点集合,由建立的SHEPWM优化模型目标个数和系统抽样[21]方法产生。
输出:最优Pareto解集,各谐波幅值和总谐波畸变率。
步骤1:设置的参数包括最大迭代次数MG,种群中个体数目N,N的取值依赖于参考点的个数,一般与参考点个数相同。根据开关角的上下限值随机产生一个均匀分布的种群P0。
步骤2:变异操作是影响极值优化性能的一个重要影响因素。将种群Pt中的第i个个体的每个组元逐一进行变异,且保持其他组元不变,构成变异后拥有Nv个个体的种群Qti。
步骤3:将Qti中的个体进行非支配排序,并进行分层,选择第一层的全部个体存入Sti中。
步骤4:判断是否将Pt中的每个个体的每个组员均完成变异?若是,则进行下一步操作;否则,则返回到步骤2。
步骤5:将集合Sti(i=1,2,…,N)合并构成集合St,此时St存放的个体即为每个个体将最差组员进行改造后形成的个体。并将St和Pt混合构成Rt。
步骤6:对Rt进行非支配排序,根据排序情况对其进行分层,记为F1,F2,…。
步骤7:根据分层情况,在Rt中选择第F1~Fl层的个体,(F1~Fl层的个体数大于或者等于N),若第F1~Fl层的个体数目大于N,则根据选择机制从Fl层中选择K(K=N-|F1~Fl-1|)个个体,将此K个个体和F1~Fl-1层的个体作为新的种群Pt,否则F1~Fl层的个体即为下一代的新种群Pt。
步骤8:判断是否满足算法终止条件?若是,则进行下一步骤操作;否则,则跳转到步骤2。
步骤9:输出Pareto解集和对应的开关角α。
步骤10:将步骤9的输出作MATLAB/Simulink中的输入,根据开关角α,产生相应的PWM波形。
步骤11:产生的PWM信号控制NPC三电平逆变电路中的开关器件,获得期望的电压。
步骤12:对输出电压进行FFT,得到各谐波幅值和THD。
3 仿真实验
为证实MaOPEO-SHEPWM算法的优越性,针对消除5、7次谐波NPC三电平逆变器进行仿真分析。所有试验都基于MATLABR2014a软件,在3.2 GHz、I5-4570处理器的PC上完成。
通过3个开关角消除NPC三电平逆变器输出电压含量较多的5、7次谐波,可得对应的高维多目标约束优化问题:
s.t.g1=α2-α1>0
g2=α3-α2>0
(10)
0<α1<α2<α3<π/2
为说明MaOPEO-SHEPWM算法的有效性,MaOPEO、NSGA-II、PSGA算法的参数对比如表1所示。为保证算法对比的公平性,MaOPEO-SHEPWM的迭代次数为200,NSGAII-SHEPWM的迭代次数为1 500,使两者算法的运行时间大致相同。

表1 MaOPEO、NSGA-II、PSGA算法的参数对比
为验证Pareto最优解集的均匀性和收敛性(通过指标HV可以衡量[21-23]),基波幅值是否符合期望电压,以及3次谐波含量、5次谐波含量、总谐波畸变率大小,选取MaOPEO-SHEPWM算法得到的部分Pareto最优解集和NSGAII-SHEPWM算法得到的部分Pareto进行对比。
经过完全独立运行程序10次,对比MaOPEO-SHEPWM和NSGAII-SHEPWM的性能。M=0.90、0.95、1.10、1.15情况下3种算法的开关角度、THD、HV以及运行时间taverage如表2~表5所示。

表2 M=0.90情况下3种算法的开关角度、THD、HV以及运行时间taverage

表3 M=0.95情况下3种算法的开关角度、THD、HV以及运行时间taverage
表2~表5列出了两种算法得到最优Pareto中间的两组开关角、HV平均值(本文中计算HV值选择的参考点为[1,2,3,4])以及运行时间平均值。
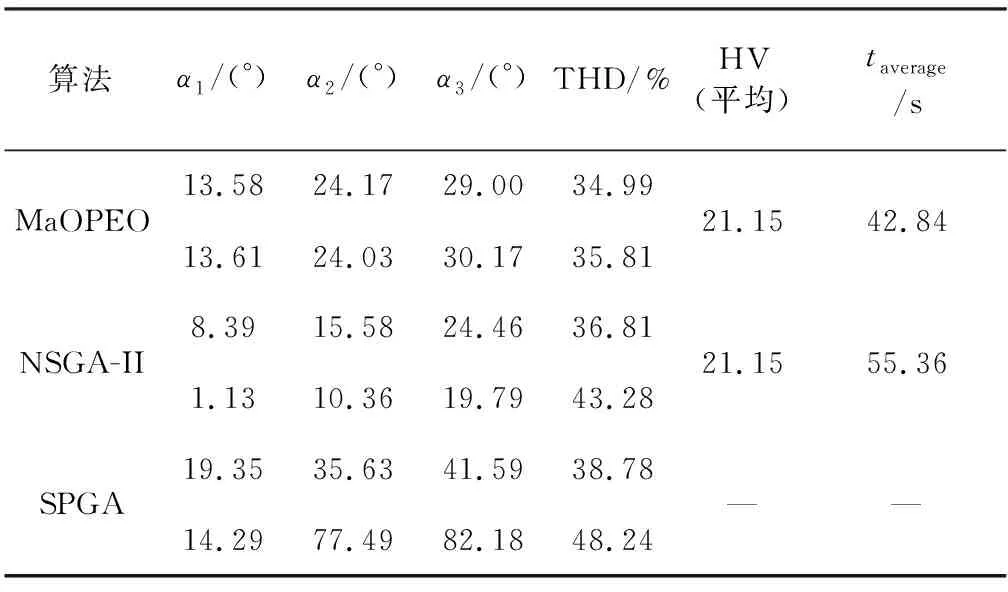
表4 M=1.10情况下3种算法的开关角度、THD、HV以及运行时间taverage

表5 M=1.15情况下3种算法的开关角度、THD、HV以及运行时间taverage
由表2~表5可得结论:
(1) 在4组调制度下(M=0.90,0.95,1.10,1.15),MaOPEO-SHEPWM算法得到最优Pareto解集HV的平均值比NSGAII-SHEPWM得到的最优Pareto解集的HV值大。这意味着,MaOPEO-SHEPWM算法能够得到分布性和均匀性能优的Pareto解集。从运行的平均时间来看,MaOPEO-SHEPWM算法在运行时间占优的情况下,能获得更优的Pareto解集,由此可以证明MaOPEO-SHEPWM算法效率比NSGAII-SHEPWM算法效率更高,因此在实际工程中MaOPEO-SHEPWM具有更大价值。
(2) SPGA由于自身为单目标的缺陷,得到的解较为单一,而MaOPEO-SHEPWM算法更加贴近实际工程,得到的并不是几个最优解,而是一系列解集,能够得到更多符合要求的解,提供给用户进行选择。
在M=0.90的情况下,MaOPEO算法和NSGAII算法基于MATLAB/Simulink 软件对NPC三电平逆变器SHEPWM控制进行仿真研究。M=0.90时MaOPEO、NSGA-II第一组解的相、线电压以及相、线电压的仿真频谱分别如图5、图6所示。
分别给出了相电压Uan和线电压Uab的仿真波形及频谱图,并给出了THD值。由图5和图6可见,MaOPEO-SHEPWM算法相电压和线电压中的5次、7次谐波基本上都被消除。在5次、7次谐波都基本被消除的情况下,MaOPEO-SHEPWM算法相比于NSGAII-SHEPWM得到更小的THD值,由此证明MaOPEO-SHEPWM的优越性。
4 结 语
本文提出了一种基于高维多目标MaOPEO-SHEPWM算法消除特定谐波,并详细介绍了基于MaOPEO算法特定谐波消除的设计流程及具体实现。并针对NPC三电平逆变器进行MATLAB/Simulink仿真分析,仿真实验结果中的5、7次谐波被消除,同时也保证了总谐波畸变率较小,证明了MaOPEO算法应用在SHEPWM方程组求解是可行的,且解的效果优于PSGA和NSGAII-SHEPWM,且在四组不同调制度情况下,能得到比NSGAII-SHEPWM更优的Pareto解集。
猜你喜欢
装备维修技术(2022年7期)2022-07-01
计算技术与自动化(2022年1期)2022-04-15
铁道机车车辆(2021年3期)2021-07-12
科学家(2021年24期)2021-04-25
计算机技术与发展(2020年2期)2020-04-15
电机与控制学报(2018年9期)2018-05-14
中国新技术新产品(2018年22期)2018-01-05
世界知识画报·艺术视界(2017年7期)2017-07-27
今日中国(2017年3期)2017-03-31
筑路机械与施工机械化(2016年12期)2017-01-13