
基于滑模观测器和干扰观测器的弹性高超声速飞行器控制
2020-09-12 07:35王亚锋范开国徐伯健
海军航空大学学报 2020年3期
王亚锋,范开国,徐伯健
(32021部队,北京100094)
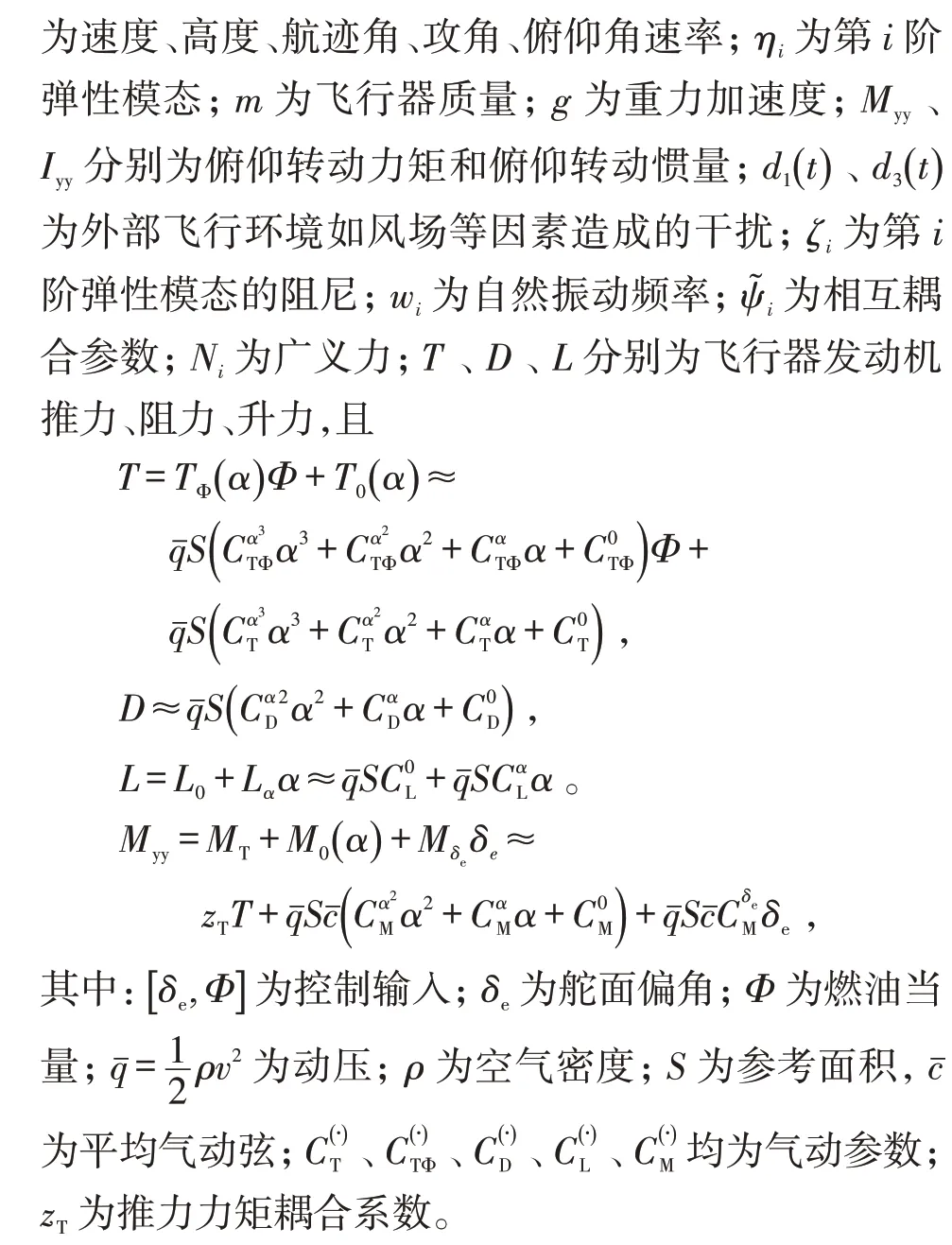
高超声速飞行器由于其飞行速度快、突防能力强、难以被拦截等优点成为快速全球打击领域的研究热点。其飞行环境的大范围变化、气动/推进/弹性之间的严重耦合、气动参数变化及外部干扰等因素导致高超声速飞行器模型呈现出强时变、强耦合和强非线性等特征[1-3],这对高超声速飞行器飞行控制提出了更高要求。
高超声速飞行器飞行控制系统的位置、速度、姿态角、角速度、比力/过载、惯性攻角和航迹角等信息由传感器测量系统提供。然而,在传感器故障或高超声速飞行器特殊飞行过程中,攻角、航迹角等部分控制状态量难以测量,导致控制系统性能变差,甚至失稳[4-7]。因此,须寻求新的方法重构未知状态量,进而设计飞行控制系统。文献[8-11]提出了状态观测器以观测系统未知状态量。文献[12-16]考虑系统鲁棒性,设计了一种滑模观测器重构系统未知状态量。
高超声速飞行器机身的推进一体化结构设计使得推进系统与飞行器外形结构的弹性形变之间存在耦合,容易引起弹性振动。为确保稳定飞行,必须考虑弹性模态的影响。此外,由于高超声速飞行器在飞行过程中容易受到风场等外界干扰的影响,必须考虑解决外界干扰的问题。文献[17]将弹性模态视为未知干扰,同时考虑风的影响,设计干扰观测器估计集总干扰。
高超声速飞行器纵向通道飞行控制系统可分为速度、高度2个功能子系统,由于高度子系统存在分层递阶的特点,文献[18-19]考虑反步法具有将一个高阶系统转化为一系列一阶系统的能力,将之应用在高度子系统控制中。针对反步法可能导致的系统复杂度爆炸问题,文献[20]进一步提出了动态逆控制方法。然而,如何考虑攻角、航迹角难以测量以及弹性耦合、外部干扰影响的实际问题,设计高超声速飞行器飞行控制系统尚未得到解决。
本文考虑难以测量的攻角、航迹角以及弹性耦合、风场等外部干扰影响,设计滑模观测器估计未知攻角、航迹角;设计干扰观测器,估计包含弹性耦合、外部干扰的集总干扰。基于滑模观测器和干扰观测器估计量,分别设计高度子系统和速度子系统的舵面偏角和燃油当量,实现对期望高度和速度信号的有效跟踪。
1 高超声速飞行器动力学
考虑弹性耦合及风场等外部飞行环境的影响,高超声速飞行器纵向通道动力学模型为:
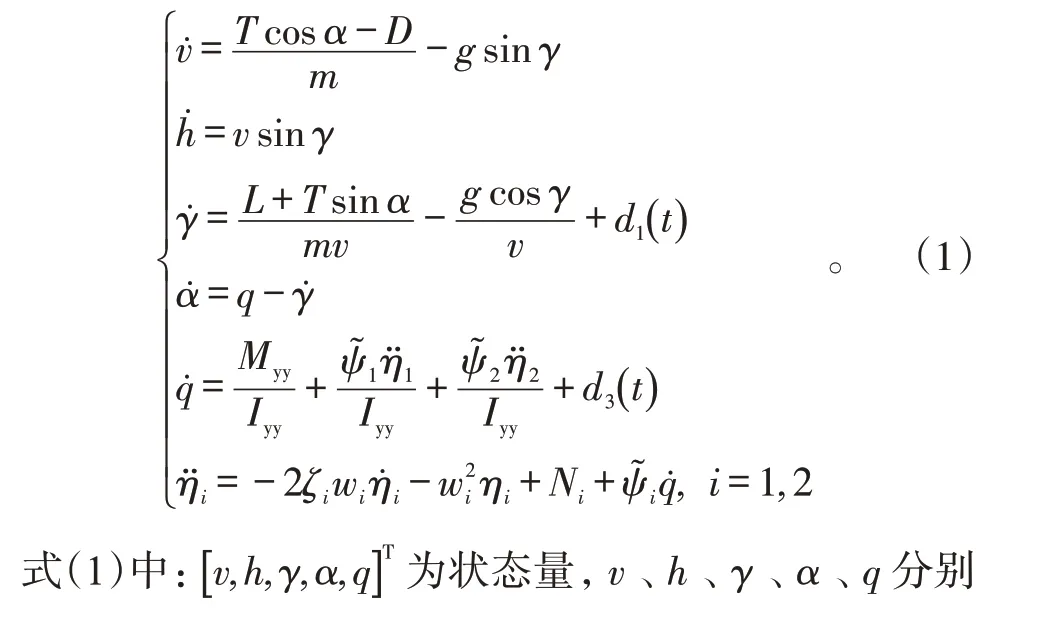
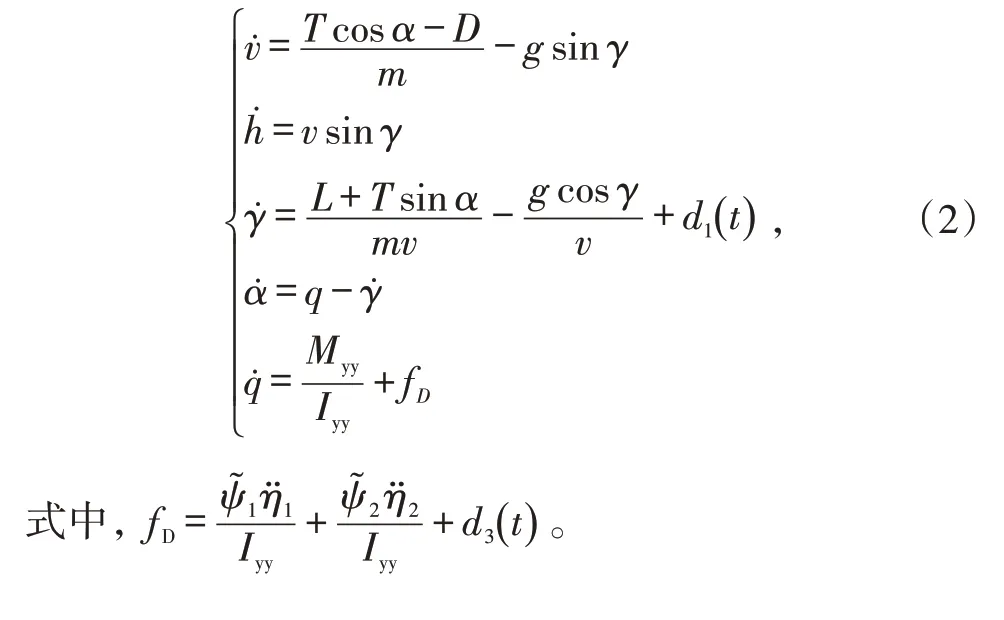
将弹性耦合、外部扰动用集总扰动表示,则式(1)可转换为:
2 基于滑模观测器的攻角、航迹角重构
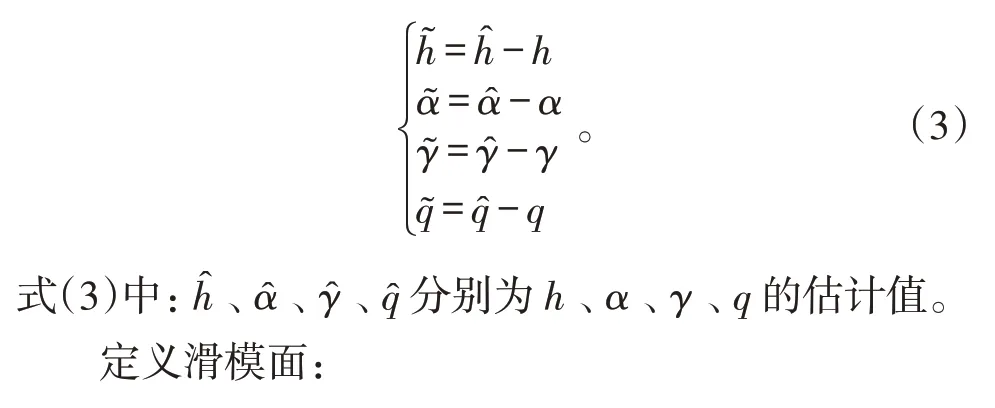
针对惯性导航系统故障及高超声速、小攻角飞行条件下,攻角、航迹角未知且不可测的问题,本文利用可测飞行高度、俯仰角速率估计误差设计滑模观测器,重构攻角、航迹角。
定义估计误差:
式(9)中:
将飞行器参数带入矩阵A,选取合适h1、h2、h3、h4使滑模观测误差动态方程式(9)的所有特征值具有负实部。此时,滑模观测器的观测误差收敛。
3 基于滑模观测器和干扰观测器的飞行控制
将高超声速飞行器纵向通道模型解耦成高度子系统和速度子系统,设计干扰观测器,估计弹性耦合及风场等外部飞行环境的造成的集总扰动,并利用滑模观测器及干扰观测器的估计值,设计控制器δe和Φ,实现高度与速度从初始值到期望值的跟踪。
3.1 高度子系统
定义高度跟踪误差为:
3.2 速度子系统
定义速度跟踪误差为:

注释:由于基于干扰观测器的高超声速飞行器纵向通道动态逆控制系统稳定性在文献[8]中得到证明,进一步结合滑模观测器式(5),能够证明由控制器式(17)、(21)、(24)、(28)所构成的闭环系统稳定。考虑篇幅限制,本文不再赘述。
4 仿真分析
仿真结果如图1~8 所示。由图1、2 可知,基于滑模观测器设计的高超声速飞行器纵向通道控制器实现了对高度和速度参考信号的有效跟踪。其中,基于可测飞行高度、俯仰角速率估计误差构建的滑模观测器实现了对未知攻角、航迹角的重构。可测飞行高度、俯仰角速率估计误差见图3,滑模函数见图4,攻角和航迹角的估计误差曲线ᾶ、γ͂见图5。图6、7 表明滑模观测器和干扰观测器对f1+d1、f3+fD进行了有效估计。高度和速度子系统的控制输入舵面偏角δe、燃油当量Φ 如图8所示。
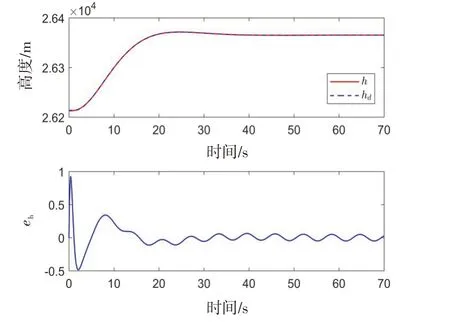
图1 高度跟踪和跟踪误差ehFig.1 Altitude tracking and tracking error eh

图2 速度跟踪和跟踪误差evFig.2 Speed tracking and tracking error ev
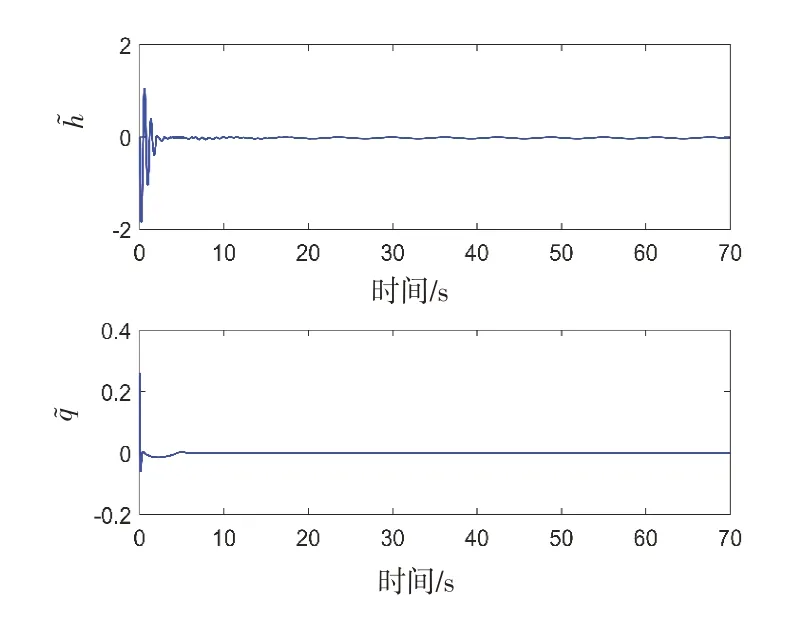
图3 滑模观测器高度、俯仰角估计误差 Fig.3 Estimation errors of sliding mode observer
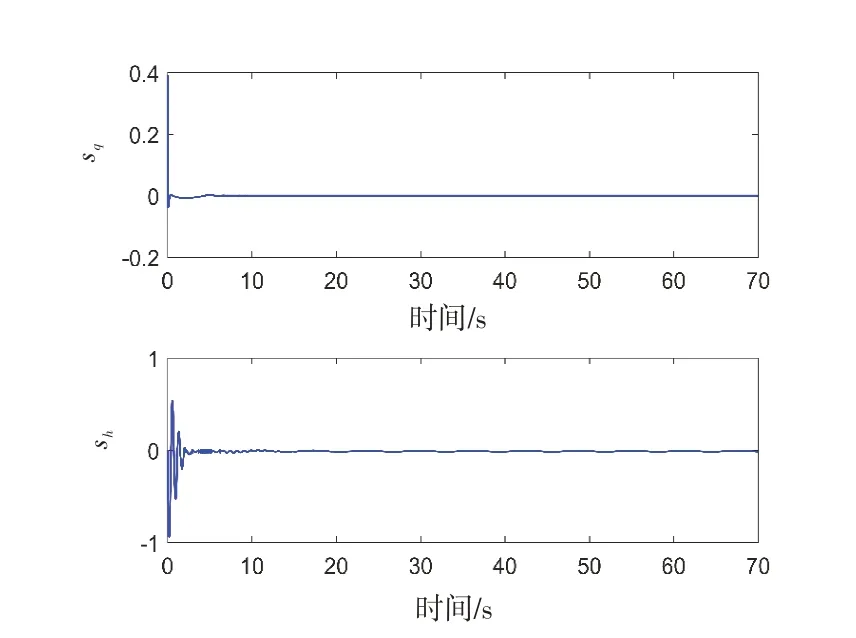
图4 滑模函数Fig.4 Sliding mode function

图5 滑模观测器攻角、航迹角估计误差͂ Fig.5 Estimation errors of sliding mode observer
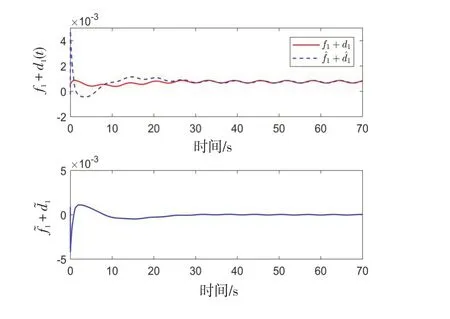
图6 f1+d1 的估计及估计误差͂Fig.6 Estimation of f1+d1 and estimation error

图7 f3+fD 的估计及估计误差Fig.7 Estimation of f3+fD and estimation error

图8 控制输入Fig.8 Control inputs
5 结论
本文针对攻角、航迹角未知且存在弹性耦合、阵风等外部干扰的高超声速飞行器纵向通道动力学,设计了基于滑模观测器和干扰观测器的飞行控制系统。该控制方法利用滑模观测器重构攻角、航迹角,利用干扰观测器估计包含弹性耦合、外部干扰的集总扰动,利用基于反步法的动态面控制设计高度子系统和速度子系统的舵面偏角和燃油当量,进而实现对高度和速度参考信号的有效跟踪。最后,通过仿真测试验证了该方法的有效性。
猜你喜欢
火力与指挥控制(2022年6期)2022-07-25
军民两用技术与产品(2022年2期)2022-06-01
凤凰动漫(军事大王)(2022年1期)2022-04-19
计算机仿真(2021年3期)2021-11-17
北京航空航天大学学报(2021年6期)2021-07-20
能源研究与信息(2015年4期)2016-02-03
科技与创新(2016年2期)2016-01-19
计算机辅助工程(2014年2期)2014-07-21
