近场聚焦逆波束形成的UUV平台噪声自适应抵消∗
2020-09-24 03:10宁江波李淑秋叶青华
应用声学 2020年4期
宁江波 李淑秋 李 宇 叶青华
(1 中国科学院声学研究所 北京 100190)
(2 中国科学院先进水下信息技术重点实验室 北京 100190)
(3 中国科学院大学 北京 100049)
0 引言
近年来,水下航行器(Underwater unmanned vehicle,UUV)在各国海洋设备中占有了举足轻重的地位,在海洋环境监测、资源开发、海上救援以及海底搜索等方面有着广泛而深入的应用[1]。在阵列信号处理中,当目标信号弱而干扰噪声强时,目标通常会被干扰掩盖,不利于微弱信号目标的检测和方位估计。UUV是个高噪声平台,近场干扰严重,影响其工作性能[2]。由于自噪声干扰强度大,舷侧阵阵元接收信号的信干比低,导致舷侧阵对目标的探测距离大大缩短,削弱了UUV的目标探测能力。
在UUV平台噪声干扰抵消中,文献[3]采用最小均方(Least mean square,LMS)自适应滤波器对机械振动噪声进行干扰抵消;文献[4]以阵列多通道差分方法提供相关参考噪声为前提,利用基于核函数的非线性自适应滤波算法对UUV 声呐阵列进行自适应噪声抵消,而需要准确的不含目标信号的噪声参考信号,这在实际中往往无法得到。采用逆波束形成进行干扰抵消是一个常用的方法,且已经研究多年;Anderson 等[5]利用常规波束形成方法,对远场平面波模型假设下的干扰抵消进行了理论分析,文献[6–7]对DICANNE(Digital interference cancelling adaptive null network equipment)进行了数字系统的设计,均表明了其有效性;文献[8]则将逆波束形成的干扰抵消应用到了拖曳阵的自噪声抵消中,该应用建立在远场平面波的假设下,而本文中的尾部自噪声源是一个近场噪声源,需要在近场进行干扰噪声抵消。文献[9–10]通过设计空间矩阵滤波器的方式对近场干扰噪声进行抑制,但其设计干扰噪声抑制的空域范围是固定的,而实际经海面反射的自噪声到达舷侧阵的方位随UUV 姿态而变化,如果设计空域矩阵滤波器则会带来大量的计算量,不利于实时处理。因此,探讨适合于UUV 运动特性的平台噪声自适应抵消方法是本文的研究重点。
本文在上述思考的基础上,提出一种平台自噪声干扰自适应抵消方法,该方法基于UUV 结构参数、深度以及航行姿态信息的实时补偿,对平台尾部干扰噪声传播到舷侧阵的路径建模,从而利用逆聚焦波束形成法估计出各阵元处所含尾部噪声的海面反射声,完成尾部自噪声干扰抵消,获得UUV平台声呐处理更优良的结果。
1 近场聚焦逆波束形成的噪声抵消原理和方法
1.1 舷侧阵阵元处平台尾部自噪声逆波束形成抵消方法
UUV平台舷侧阵列接收到来自远场的目标信号和平台自噪声及海洋环境噪声的干扰,阵元接收信号的信噪比很低,特别是平台尾部自噪声的多途干扰,严重影响UUV的目标探测能力,如何有效抑制各阵元处平台尾部自噪声干扰,成为提高UUV舷侧阵声呐探测距离的一个关键问题。为此,在分析阵列接收目标信号和来自尾部的多途自噪声干扰模型,以及分析平台参数和平台运动参数影响尾部自噪声干扰的基础上,提出一种采用近场聚焦逆波束形成的UUV平台噪声自适应抵消方法,以达到实时有效抑制尾部自噪声干扰的目的。近场聚焦逆波束形成自适应噪声抵消流程图如图1所示。
由图1,利用UUV平台参数、深度和运动姿态的实时信息对UUV平台尾部自噪声传播到舷侧阵阵元的路径进行分析,采用近场聚焦波束形成实时地获取不含目标信号的尾部自噪声,再对获取的自噪声加以相位向量和幅度向量的补偿,得到各阵元处的自噪声,从而实现对尾部自噪声源的直达噪声、海面反射噪声的实时抵消,得到有效抑制平台尾部自噪声的阵列接收信号。
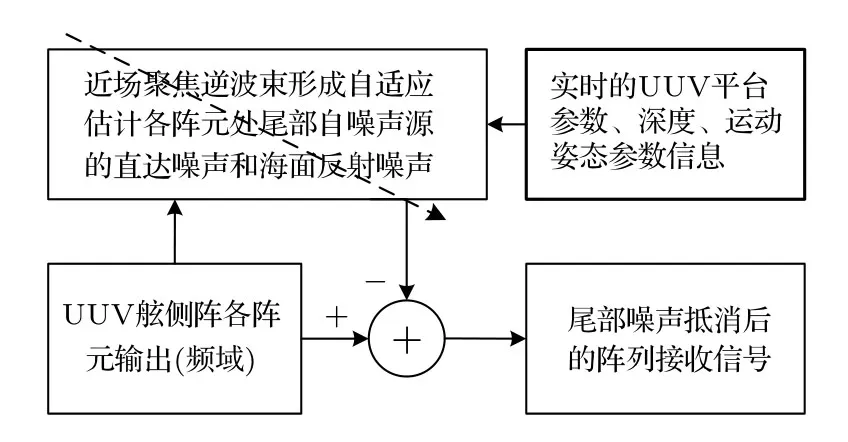
图1 近场聚焦逆波束形成自适应噪声抵消流程图Fig.1 Flow chart for adaptive noise cancellation by focusing inverse beamforming in the near field
1.2 阵列信号接收模型
在近场下,均匀线列阵阵元个数为M,阵元间距为d,以阵中心为原点O,沿线列阵方向为x轴,线列阵垂直方向为y轴,建立O-xy平面坐标系,第m号阵元的坐标为Tm=(−(M−1)d/2+(m−1)d,0)T,其中(·)T表示转置,阵列信号接收模型如图2所示,其中s(t)是来自于θ方位的远场平面波目标信号,sn(t)为近场噪声源信号。
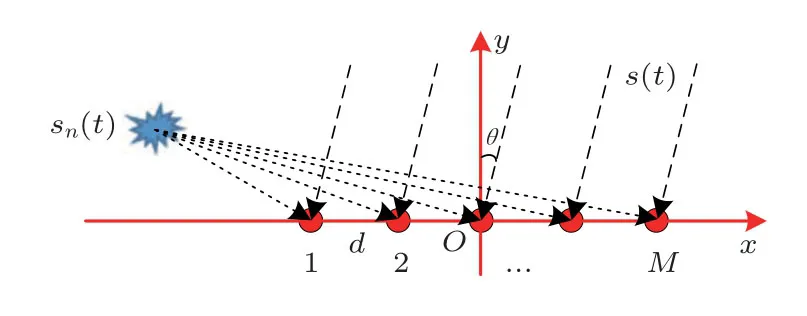
图2 近场干扰下阵列信号接收模型Fig.2 The receive model for array signal under the near-field interference
设近场噪声源在O-xy下的坐标为a,令Dm表示噪声源到达第m号阵元的距离,有

其中,||·||表示Euclidean 范数,假设信号形式在时域上表示为复数形式,以下均同。设声速为c,按照球面波衰减理论[11],各阵元接收的信号声压幅值与距离成反比,因此可得第m号阵元接收到的噪声源信号为

其中,τm=Dm/c表示噪声源到第m号阵元的传播时延,阵列接收的噪声源信号为Rn(t)=(r1(t),r2(t),···,rM(t))T。
当K个远场目标信号以平面波方式入射到均匀线列阵上,设阵列接收信号为X(t)=(x1(t),x2(t),···,xM(t))T,有

其中,S(t)=(s1(t),s2(t),···,sK(t))T为K ×1 维目标信号列向量,P=(p(θ1),p(θ2),···,p(θK))是K个目标方向导向向量组成的阵列流形矩阵,其第k列为
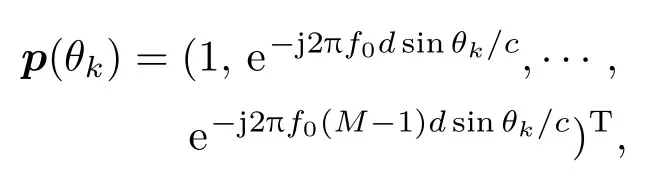
f0是入射信号源的中心频率是虚数单位,N(t)=(n1(t),n2(t),···,nM(t))T为M ×1维随机噪声列向量。由于实际中信号一般是宽带信号,可在频域表示如下:

其中,X(fq)、S(fq)、Rn(fq)、N(fq)分别是阵列接收数据、目标信号、噪声源信号和随机噪声经离散傅里叶变换(Discrete Fourier transform,DFT)之后在第q(q=1,2,···,Q)个子带的中心频率fq上的向量,P(fq)为在频点fq上的目标阵列流形矩阵。
1.3 噪声抵消原理
根据上述阵列信号接收模型,可以在此基础上通过近场聚焦波束形成[12]获得噪声源信号。构造相位补偿向量和幅度补偿向量分别为

其中,f为处理信号的中心频率,得到加权向量

其中,“◦”表示向量中对应元素相乘,对接收信号进行球面波时延补偿以及幅度加权补偿,利用式(6)对阵列接收信号进行加权叠加得
其中,(·)H表示共轭转置,且

表示在估计噪声源信号后得到的信号估计余量,文献[5]表明式(8)是一个小量,此处将其忽略,把yn(t)看作是sn(t)的近似估计值,通过聚焦逆波束形成估计各阵元中接收的近场噪声源信号,有

原始阵元接收信号X(t)与Rn(t)相减,以抵消噪声,从而得到新的阵列接收信号:

根据上述的近场聚焦逆波束形成干扰抵消原理,则实现阵列接收信号中近场噪声的去除,完成干扰抵消。
2 平台尾部自噪声传播模型
当UUV 在近水面低速航行时,假设UUV 对于声传播是透明的,即UUV 实体结构的存在不影响声音的直线传播,对从UUV 尾部自噪声源到舷侧阵的直达噪声以及经过一次海面反射的噪声的传播路径进行几何建模。
2.1 直达噪声传播模型
直达噪声模型建立如图3所示,以两舷侧阵中心为坐标原点O,建立O-xyz舷侧阵坐标系,其中x轴指向UUV艏部方向,z轴垂直纸面向外,两舷侧阵和尾部自噪声源A始终位于同一平面内且相互平行。舷侧阵为均匀线列阵,阵列长度为L,有L=(M−1)d,舷侧阵到达x轴的距离为r,将A视作点声源,A与1号阵元在x轴方向上的距离为R。
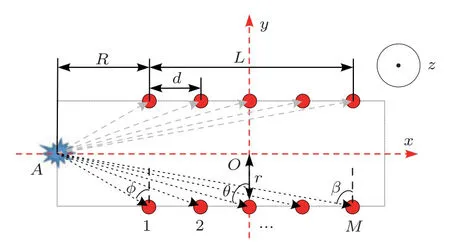
图3 直达噪声传播模型Fig.3 Model for the direct propagation of noise
UUV左右舷侧阵关于x轴对称,以右舷侧阵列为例,从图3可得A的坐标为=(−L/2−R,0,0)T,第m号阵元的坐标为
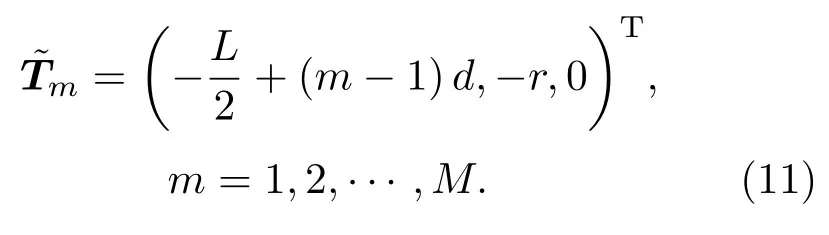
对远场目标的探测采用远场平面波的假设,在对舷侧阵接收信号进行波束形成时,近场的干扰也会在方位谱中呈现出来。目标的方位角θ ∈[−90◦,90◦]定义为声源指向线列阵中心的向量与y轴的夹角,图3中ϕ和β是A分别指向第1号阵元和第M号阵元的向量与y轴的夹角。显然,当采用平面波假设的常规波束形成进行方位估计时,A所在的方位介于β和ϕ之间,设其方位估计值为,有β <<ϕ,根据阵元坐标和A的坐标可得
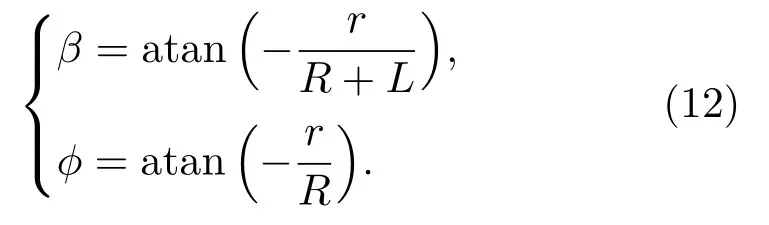
式(12)表明直达噪声在ϕ和β之间产生干扰,且该方位区域只与UUV的平台设计参数有关。
2.2 海面反射噪声传播模型
海面反射噪声模型采用虚源理论,假设海面反射为镜面反射,不考虑反射损失,将A映射到海面上方的虚源B,建立虚源到达舷侧阵的海面反射噪声传播模型,如图4所示。在三维直角坐标系O-XY Z中,O-XY平面与海平面平行,其中X轴指向UUV艏部方向,Z轴垂直海平面向上,原点与舷侧阵坐标系重合。实际中,UUV 运动伴随着纵倾角和横滚角的存在,图4中α为纵倾角,γ为横滚角,设UUV艏部上仰时纵倾角为正,右倾时横滚角为正,则舷侧阵坐标系O-xyz与O-XY Z存在如图4所示的坐标旋转关系。h为UUV的航行深度,即原点O到海面的距离。
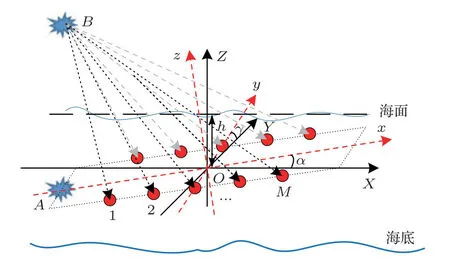
图4 纵倾角与横滚角存在下的补偿模型Fig.4 Modified model with the existence of pitch angle and roll angle
考虑到纵倾角和横滚角的影响,舷侧阵坐标系下的坐标可以通过旋转矩阵转换到O-XY Z坐标系下,旋转矩阵[13]为

舷侧阵坐标系下第m号阵元的坐标通过旋转矩阵,可以得到O-XY Z坐标系下的表达形式:

A的坐标位于X轴上,因此不受横滚角的影响,但与纵倾角有关,通过旋转矩阵Rxz可得
结合A的坐标以及深度h可得B的坐标:

下面分析海面反射噪声所在方位的影响因素,分析表明横滚角γ的影响很小,假设γ=0,有cosγ=1,sinγ=0,那么结合式(11)、式(13)、式(14)可得第1号阵元和第M号阵元的坐标分别为
UUV 在水下航行时,一般情况下r要小于B的Z轴坐标,海面反射噪声的方位可利用图5中的O-xz平面进行近似分析,图5中虚线圆圈表示右舷侧阵在该平面上的投影。
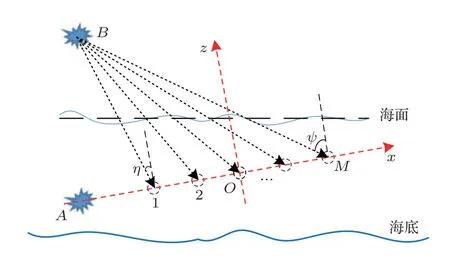
图5 海面反射噪声传播分析Fig.5 Propagation analysis of the sea reflection of propeller noise
设B在平面波假设下方位为有ψ <<η,通过分析ψ和η以间接分析结合式(16)、式(17)可得
图6给出了在一定α值下,η和ψ随h的变化情况:当h一定时只由α决定;当α一定时,在浅水区域,h的变化对的影响很显著,且出现在偏尾部区域,但随着h的增大逐渐趋于一个常数,例如当α=0◦时,随着h的增加,会无限的趋近于0◦,即UUV的正横方向。
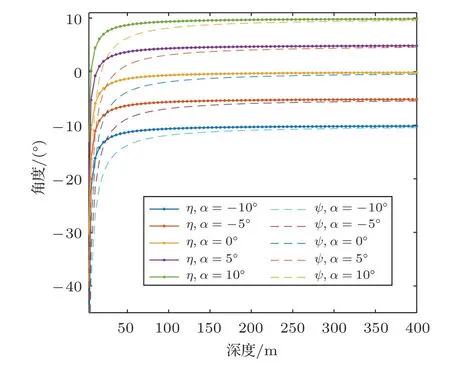
图6 海面反射噪声方位分析Fig.6 Angle analysis of noise reflected by sea surface
3 仿真实验
3.1 模型仿真分析
下面根据模型仿真分析平台尾部自噪声源的直达噪声与海面反射噪声对舷侧阵的影响,分别考虑UUV的横滚角、纵倾角和深度,在远场平面波假设下,利用常规波束形成得到方位谱形成方位历程图。
3.1.1 横滚角变化
横滚角服从γ∼U(−10◦,10◦)的均匀分布,h=5 m,α=0◦,仿真结果如图7所示,其中图7(a)为横滚角随时间变化图,图7(b)和图7(c)分别为直达噪声与海面反射噪声的方位历程图。
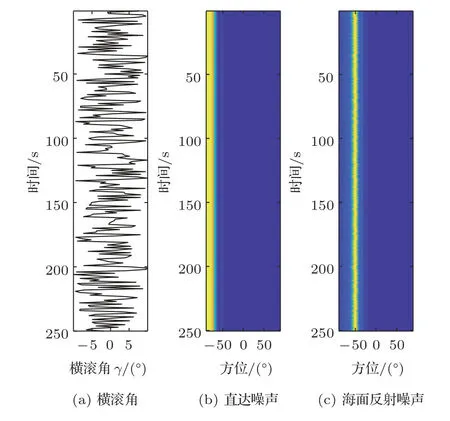
图7 横滚角变化下的噪声方位历程图Fig.7 The bearing time record of noise under the change of roll angle
3.1.2 纵倾角变化
纵倾角服从α∼U(−10◦,10◦)的均匀分布,γ=0◦,h=5 m,仿真结果如图8(b)、图8(c)所示。
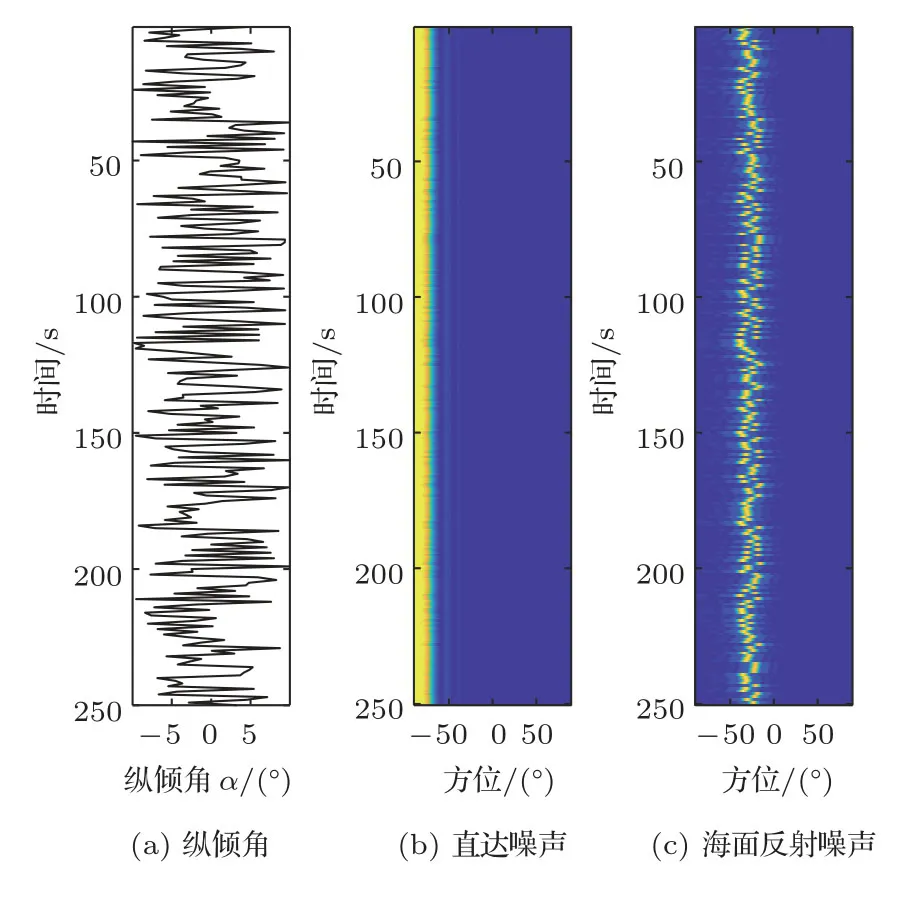
图8 纵倾角变化下的噪声方位历程图Fig.8 The bearing time record of noise under the change of pitch angle
3.1.3 深度变化
深度服从图9(a)所示,α=0◦、γ=0◦,仿真结果如图9(b)、图9(c)所示。
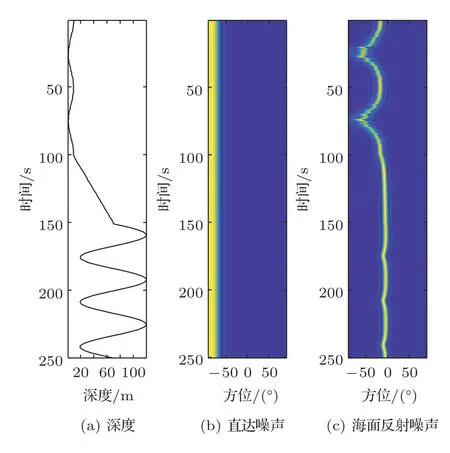
图9 深度变化下的噪声方位历程图Fig.9 The bearing time record of noise under the change of depth
观察图7、图8和图9,无论UUV的深度、纵倾角和横滚角如何变化,直达噪声的方位一直稳定在尾部区域,其只取决于UUV平台设计参数。对于海面反射噪声,图7中横滚角的变化对其影响很小;图8中海面反射噪声方位与纵倾角呈现相同的变化趋势,表明纵倾角可以直接影响噪声所在方位;图9中,当UUV 深度较浅时,深度的变化会导致强烈的海面反射噪声方位变化,但当深度达到一定程度后,其影响能力减弱,并逐渐趋于正横方向。
3.2 噪声源信号的相关性分析
采用逆波束形成的方法来进行干扰噪声的抵消,其得到的噪声信号与噪声源信号的相关性越强,则提取的噪声信号更接近于噪声源信号,那么干扰抵消效果会更好。通过常规逆波束形成和本文的聚焦逆波束形成能得到各个阵元上的海面反射噪声,下面分析它们与仿真直达噪声的相关性。平台参数设置:d=0.1875 m,R=2.3102 m,r=0.7695 m,M=24,采样频率为20 kHz,声速为1460 m/s,某一时刻UUV 深度h=7.8911 m,纵倾角α=−0.8281◦,横滚角γ=2.3906◦,在没有目标存在的情况下,螺旋桨桨叶数为5,转速为5 r/s,经宽带噪声调制后的得到噪声源辐射信号,以第1个阵元为例进行相关性分析对比,如图10所示,相关系数经过了归一化,很明显通过本文的聚焦逆波束形成得到的海面反射噪声与直达噪声的相关性比常规波束形成更强,表明本文的方法所提取的噪声信号更有利于自噪声干扰抵消。
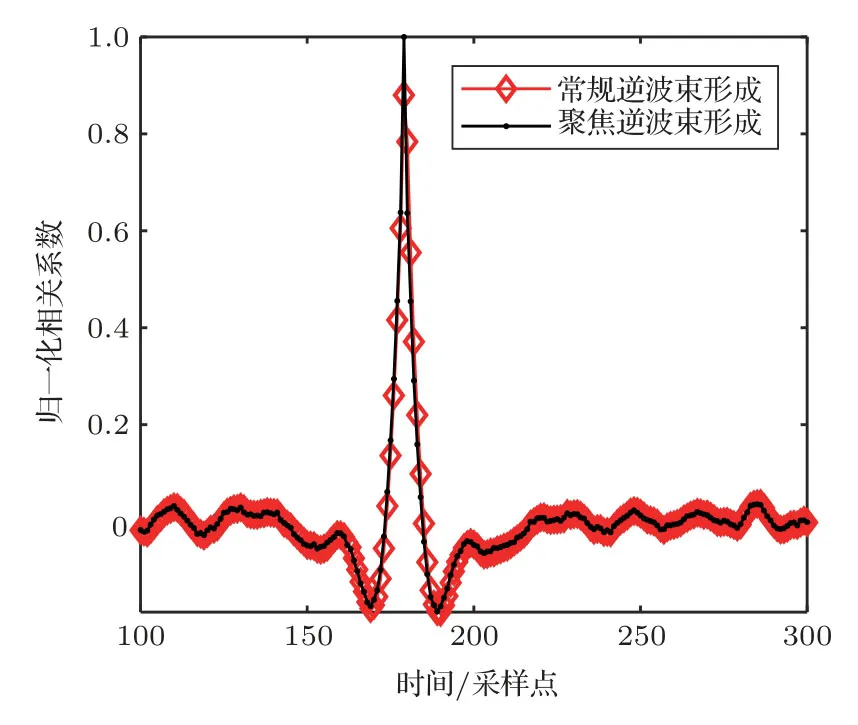
图10 相关性分析对比Fig.10 Comparison for the analysis of correlation
3.3 噪声抵消方法仿真
通过构造舷侧阵阵元接收信号,对尾部自噪声进行干扰抵消仿真。不考虑海面反射损失以及海水吸收损失,噪声源视为点声源,按照球面波扩展传播方式。仿真参数设置同上,一个目标位于远场,深度恒为20 m,运动轨迹如图11所示,假设UUV始终位于原点,其深度、纵倾角和横滚角随时间变化如图12所示。以右舷侧阵为例,设定UUV平台参数;目标信号和噪声干扰均为高斯白噪声,信干比为−30 dB,信噪比为−10 dB,处理频带1 kHz∼4 kHz,频带划分为301个窄带。
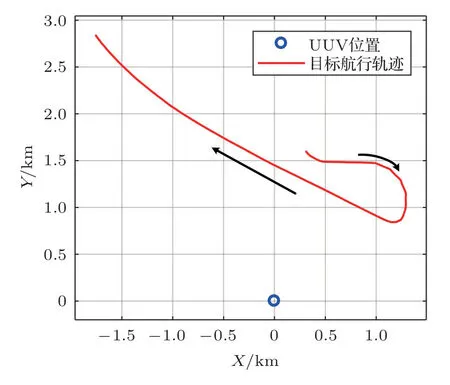
图11 UUV与目标相对位置Fig.11 Position of UUV and target
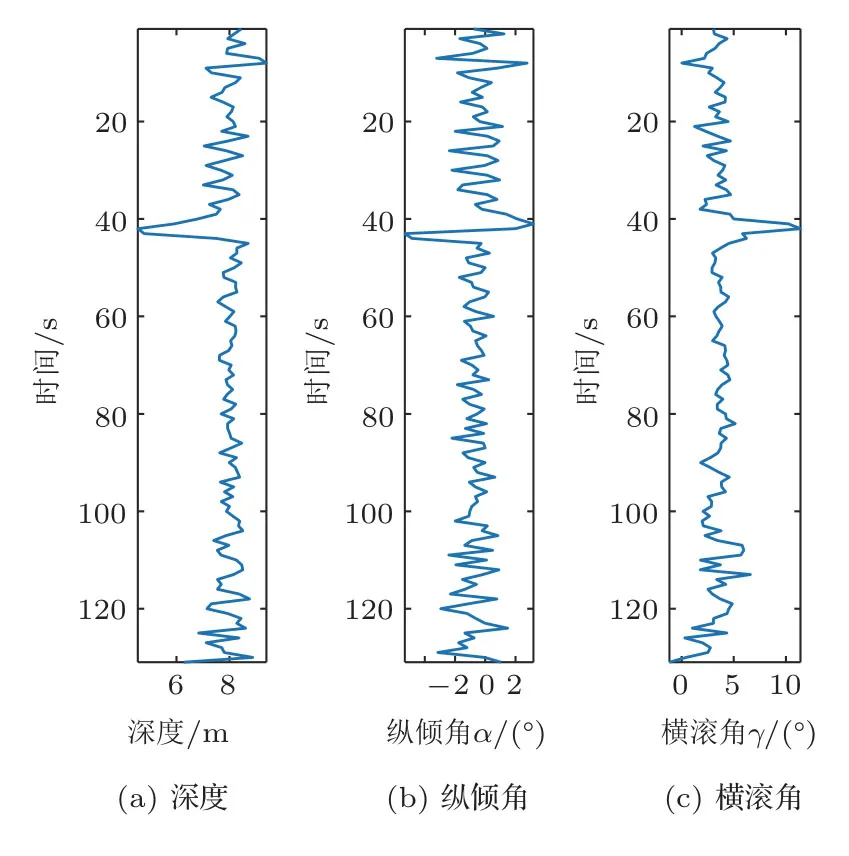
图12 深度、纵倾角和横滚角随时间变化图Fig.12 The time record of depth,pitch angle and roll angle
采用常规波束形成,进行干扰抵消前后的方位历程图分别如图13(a)、图13(b)所示。图13(a)的仿真结果表明,直达噪声在−90◦的区域内产生了一个干扰区域,其范围较大,并且近似位于舷侧阵的端射方向;海面反射噪声到达舷侧阵的能量相比直达噪声则要弱,当未对噪声进行抵消时,方位历程图上看不到目标的轨迹。图13(b)中,在进行干扰抵消之后,直达噪声与海面反射噪声的所在的方位出现了明显的消除,低信噪比的目标信号也凸显了出来。对比图13(a)、图13(b)可知,在消除自噪声干扰之后,可以提高UUV舷侧阵对弱目标信号的探测能力。此外,当目标穿过自噪声干扰区域时,目标方位会因干扰抵消而中断,这是因为当干扰方位与目标方位相近时,噪声干扰的导向向量与目标的导向向量存在着较大的相关性,使得目标信号也一并被抵消。
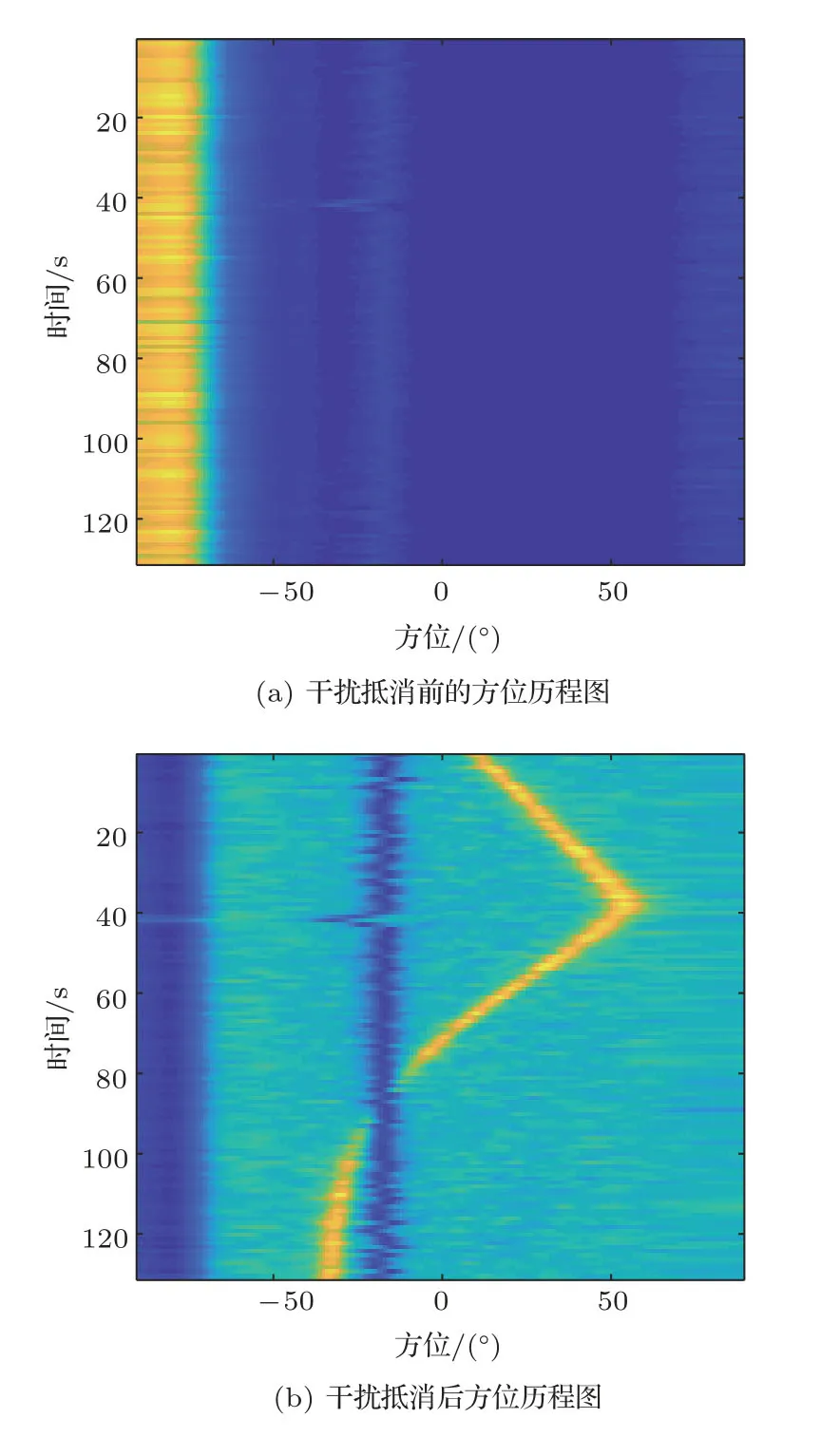
图13 噪声干扰抵消前后对比Fig.13 Comparison before and after interference cancellation of noise
图14是图13方位历程图中80 s处的方位谱对比,更加清晰地展现了尾部自噪声对目标信号的掩盖以及进行干扰抵消后所凸显的目标方位。
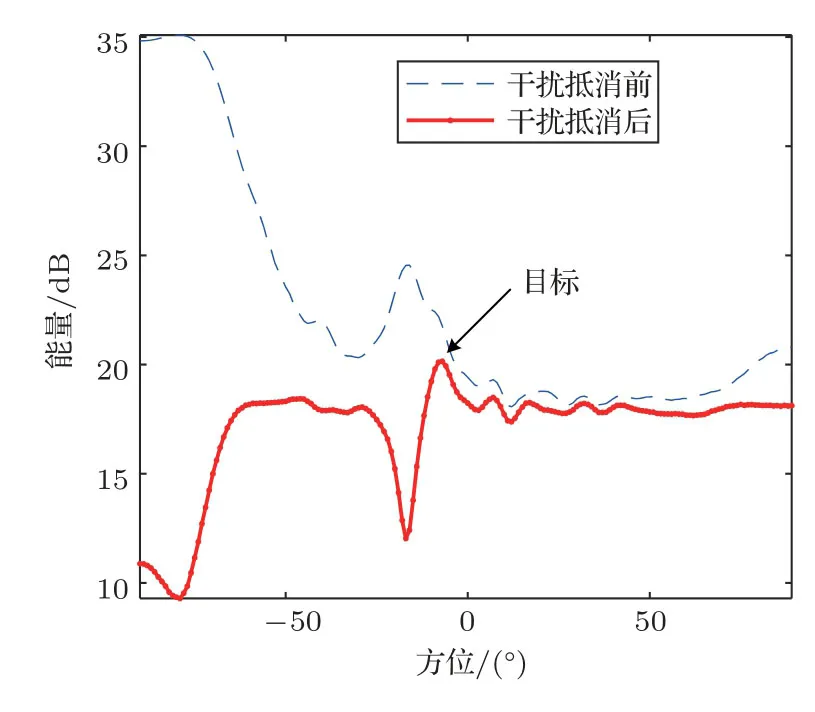
图14 噪声干扰抵消前后方位谱对比Fig.14 Azimuth spectrum comparison before and after interference cancellation of noise
4 海试实验
海试数据来自于中国科学院声学研究所2019年3月在某海域开展的UUV技术验证实验,合作目标为固定的防波堤声源,海底深度约为50 m,海水声速为1460 m/s,UUV左右各一个舷侧阵,每个舷侧阵有24个阵元,选择一段时长为4 min的海试实验数据,对其进行处理。图15展示了UUV航行轨迹、防波堤声源以及其他非合作目标的相对位置平面图。
UUV的实时深度、纵倾角和横滚角如图16所示,采用常规波束形成,艏部方向为0◦方向,图17中给出了直达噪声与海面反射噪声的干扰抵消前后结果对比,在干扰噪声抵消之后,直达噪声以及海面反射噪声的方位区域在方位历程图中消失了,凸显了目标方位,特别是非合作目标2,在干扰抵消前几乎被掩盖了,但是在干扰抵消后,其方位历程得到了极大增强。
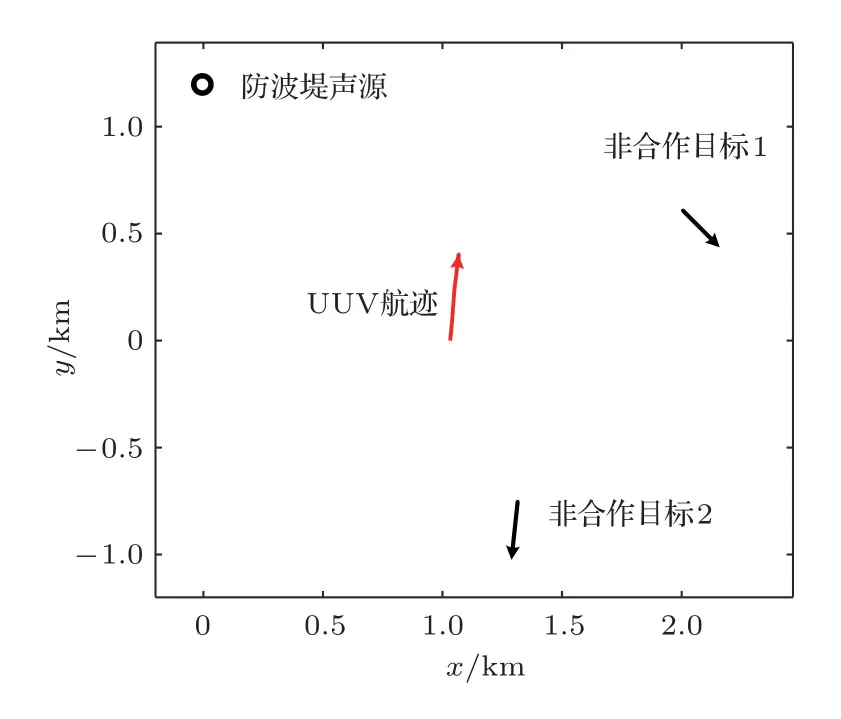
图15 海试实验中的目标与UUV 运动轨迹Fig.15 Movement track of target and UUV in the sea trial
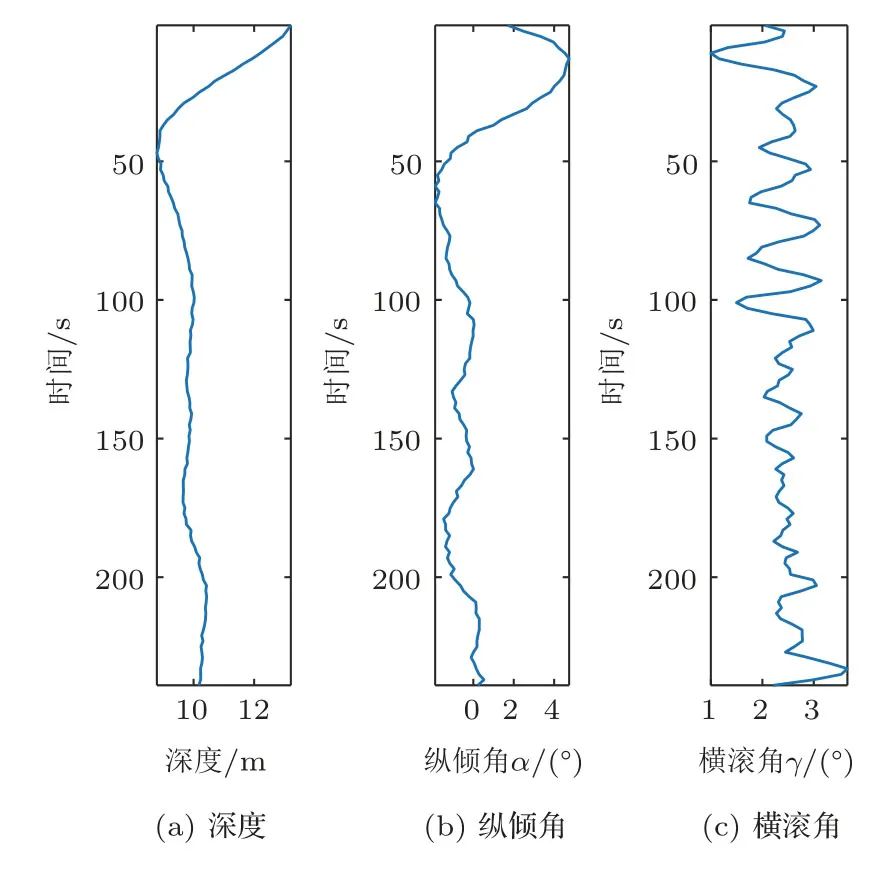
图16 海试实验中UUV的深度、纵倾角、横滚角随时间变化图Fig.16 The time record of depth,pitch angle and roll angle in the sea trial
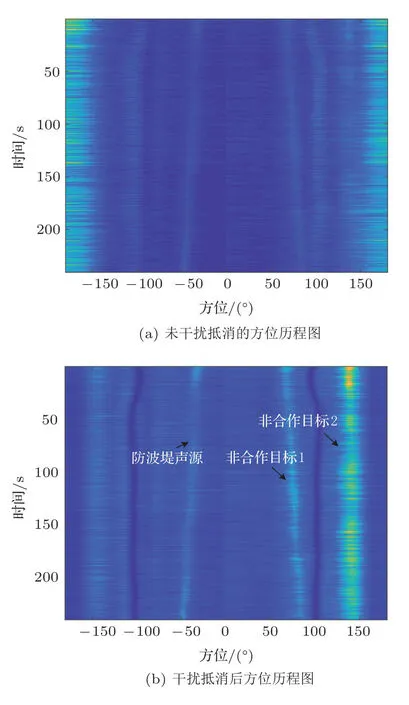
图17 海试实验数据处理的噪声干扰抵消前后对比Fig.17 Comparison before and after interference cancellation of noise from data processing in sea trial experimental
图18为该段时间内第40 s的方位谱,从中可以看到,在进行自噪声的干扰抵消后,突出了目标信号,去除了因自噪声而产生的虚假目标。
结果表明,通过本文的方法进行噪声抵消能有效减少尾部自噪声对探测的影响,对本文基于近场聚焦逆波束形成的平台噪声自适应抵消方法的正确性给予了合理的验证。此外,根据本文的模型,直达噪声与海面反射噪声所在方位区域可以根据UUV的相关信息进行预测,为避免目标落到该噪声方位中对目标探测产生不利,UUV可以根据提前预测噪声方位制定好的目标探测策略,让目标的方位尽可能远离该噪声所在方位区域,使得对目标探测更加有利。
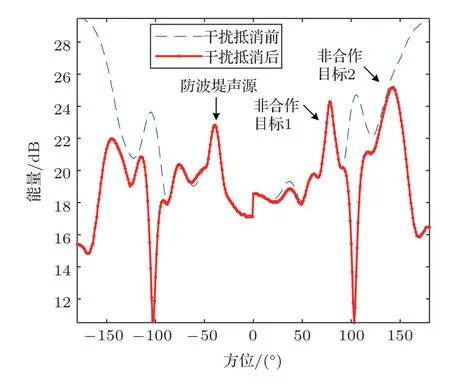
图18 干扰抵消前后方位谱对比Fig.18 Comparison of azimuth spectrum before and after interference cancellation of propeller noise
5 结论
本文结合UUV平台参数、深度、纵倾角和横滚角信息对平台尾部自噪声传播到舷侧阵的路径建模分析,利用聚焦逆波束形成的方法对尾部自噪声进行实时抵消,仿真与海试实验结果表明了该方法的有效性和实用性,能够显著提高UUV 对弱目标的探测能力,可对实际的UUV 应用提供一定的指导。当目标位于尾部自噪声方位以及相关阵元接收其海面反射噪声方位时,目标信号也会被抵消,此时需要适当改变UUV平台的运动方向,使目标方位远离噪声所在方位。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
电子世界(2022年1期)2022-07-23
红蜻蜓·低年级(2021年2期)2021-07-20
汽车工程(2021年12期)2021-03-08
小学科学(2020年6期)2020-06-22
辽河(2019年7期)2019-09-03
红领巾·探索(2019年6期)2019-08-01
雷达与对抗(2015年3期)2015-12-09
中国塑料(2015年4期)2015-10-14
振动工程学报(2014年4期)2014-03-01