
高精度定位航向系统的设计和应用
2020-10-09 10:10苏章亮
中国科技纵横 2020年9期
苏章亮
摘 要:针对海洋施工工程、空间测量工程,包括施工船、无人机,在海洋、天空这种无参考系作业时,必须通过坐标的定位和航向来完成工程的施工。本文介绍一种高精度GNSS的系统和装置,能够实现亚米级的定位和航向功能,作为一种必要的航向辅助工具,可广泛应用于海洋空间的测量施工作业工程。
关键词:GNSS;航向;原理
中图分类号:P228.4 文献标识码:A 文章编号:1671-2064(2020)09-0073-02
1系统框架
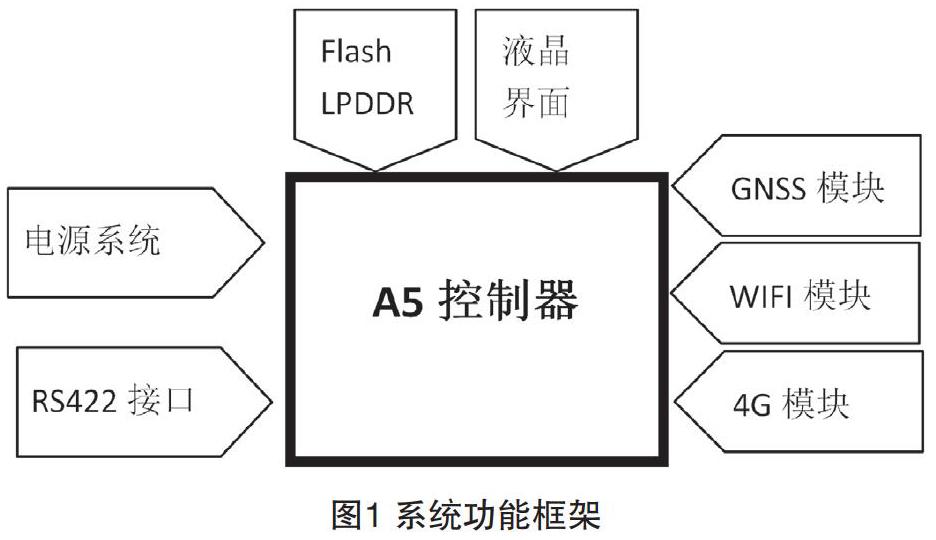
本系统装载高精度GNSS模块,可接收GPS、GLONASS、BDS、GALILEO多星多频段,匹配稳定可靠的右旋圆极化全频段天线,保证定位和定向高精度功能。本系统搭配嵌入式硬件功能平台,包括嵌入式MCU、LPDDR2、电源管理系统、WIFI模块、4G模块、RS422/485接口、小尺寸液晶交互界面等。嵌入式软件操作系统对各个功能模块进行初始化驱动,并对定位定向数据的解算输出。系统可通过外接通讯接口传输定位航向数据给到中控端,也可以通过WIFI连接传输数据给到手持平板接收端,实现多种连接方式接收定位航向数据。[1]
(1)嵌入式平台:包括主MCU控制器、Flash、LPDDR,液晶交互。[2]
(2)GNSS模块:通过天线接收多星数据,接收CORS基准站查分数据实现亚米级定位。
(3)WIFI模块:可用于无线传输数据到接收端。
(4)4G模块:通过拨号连接基准站,接收查分数据。
(5)电源管理系统:隔离稳压输入,提供稳定的电源给系统。
(6)RS422/485接口:隔离的数据传输接口,连接到中控端,提供长距离传输功能。
本系统的基本功能构成和框架如图1。
2功能设计
2.1嵌入式平台设计
本系统MCU选用SAMA5XX系列芯片,该芯片是一款基于ARMR CortexTM-A5的高性能、节能的嵌入式微处理器,主频速度达到536MHz。32kB的数据缓存、32k的指令缓存、虚拟内存体系结构(VMSA),全集成MMU和浮点单元(VFPv4)。该芯片的核心供电电压1.2V,低功耗模式下仅0.5W。其工业级的工作温度:-40℃~+85℃,保证严苛的温度环境下稳定运行。芯片提供丰富的外设功能接口,包括I2C、SPI、UART、USB、LCD、SDIO、网络接口等,满足该方案的设计需求。系统搭配512M LPDDR2 SDRAM,256M NAND Flash,并可選配8G以上的内部eMMC存储器。
系统搭配来2.4英寸的TFT液晶,可实时显示设备的工作状态、数据传输状态。
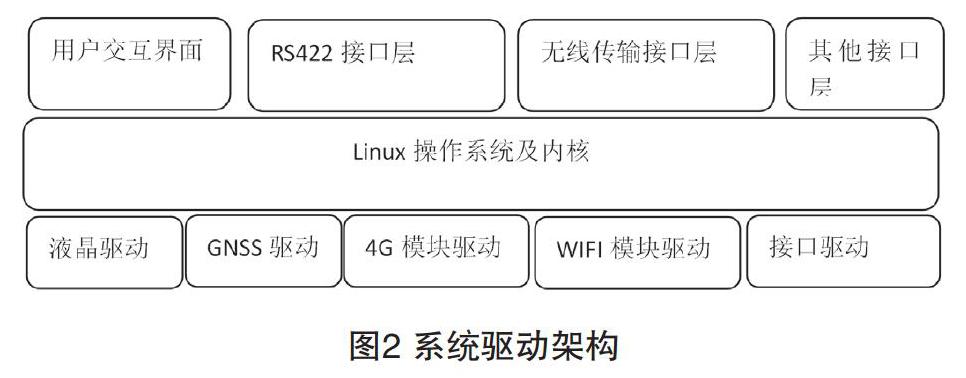
本系统移植了Linux操作系统,在底层对各个功能接口、液晶、WIFI、4G模块、GNSS模块进行初始化驱动,并加载上层应用软件层,数据处理层,用户界面层,对接口模块和数据进行控制处理。系统基本的软件架构如图2。[2]
2.2 GNSS模块
本次选用Novatel的OEM617D模块,模块通过USB和UART与系统连接通讯。支持GPS L1/L2、GLONASS L1/L2、BeiDou B1/B2、Galileo E1/E5b。并且实现SBAS差分功能。多星系多频段实现高精度的定位定向功能。模块具备HEHDT或GPHDT航向输出,精度≤0.3度RMS,支持差分定位DGPS解算功能,水平精度达到0.4m RMS。在L1/L2的模式下水平精度达到1.2m RMS。可通过网络接收基准站查分数据,达到亚米级的定位级别。模块支持1pps脉冲信号输出,实现与远程设备的同步。[1]
2.3无线传输设计
2.3.1 WIFI模块设计
系统选用带AP功能的WFxxx-E系列的WIFI模块。支持IEEE80.11 b/g/n协议,使用SDIO接口与系统连接。模块使用系统稳压的3.3V电源供电。无线设备端通过WIFI连接到本系统的WIFI模块,可以通过网页配置端,查看系统的设备信息,卫星定位数据和航向数值。
2.3.2 4G模块设计
系统选用EC20系列LTE模块,该模块使用3GPP Rel.9 LTE技术,提供100Mbps的下行链路和50Mbps的上行链路速率,覆盖全球LTE、UMTS/HSPA+、GSM/GPRS/EDGE范围。模块使用MIMO技术满足对速率和链路可靠性的要求。使用该模块时需要在系统端设置公网IP地址219.xxx.xxx.xxx,设置端口为2018,通过拨号连接登录基准站网络,接收基准站的差查分数据源,通过对查分源的解算实现高精度网络差分定位。在系统驱动时注意上电逻辑的控制,断电前需对模块FULL_CARD_POWER_OFF管脚进行拉低处理0.3s后才能操作电源断电,确保模块正常关闭。
2.4电源管理系统设计
考虑到设备可能应用在作业船上,船上的电机马达提供的电源极不稳定,可能存在高峰浪涌。所以在电源设计上需保证具有浪涌防护功能。本系统选用Linear公司的LT4363浪涌抑制芯片,具备4V~80V超宽工作电压,满足锂电池供电和电机供电。该芯片利用VCC箝位可承受高于100V的浪涌,快速过流限制在5us内,有效的保护后级电路不被浪涌冲击,保证系统电源稳定工作。该芯片具备可调节的输出电压箝位,通过配置FB管脚的电阻达到限制输出电压目的,基于本次系统内部供电需求,把箝位配置在36V以内,防止过高的输入电压损坏内部电源链路。该芯片还支持可调的高低电压比较门限,通过内置的精密比较器检测OV/UV管脚的过压、欠压条件,单电压低于内部阀值1.275V时,其内部MOSFET管即会关断,当高于其阀值时,内部GATE会重新打开,回复正常电压范围。本次应用中,OV/UV设置在6V~36V之间,确保覆盖实际应用的输入电压范围,同时箝位其他范围电压,保证输入端电源稳定性。该芯片具备过流检测功能,通过配置SNS和OUT管脚之间的电阻值,完成限制电流电路的功能,该限流功能限制栅极管脚,把电压差值限制在50mV以内。当电流瞬间增大到限制范围,电路处于故障状态,电流检测端口能够识别到并快速关断栅极引脚。本次配置限流电阻为15mΩ,把电流限制在3.3A以内,已确保系统电路安全。该芯片功能强大,能够对输入端、输出端电压进行可调节的箝位,并能够配置限流范围,满足不同使用环境下的针对性配置。
基于多种可能的宽电压源输入,系统需要一个稳定的3.3V电压供电。本系统设计使用一个降压DCDC稳压芯片,把输入电压稳压到3.3V供系统使用。选用LT8614系列同步压降型芯片,该芯片具有高达96%的工作效率,超宽的输入电压:3.4V~42V,以及超低的2.5uA的IQ静态电流,同步输出电流最高可达4A。
2.5接口设计
为满足船上长距离的传输需求,本系统除了短距离无线传输模式,还设计了满足长距离传输的RS422/485连接接口。RS422/458接口规范,理论传输距离可大1km,能夠满足各种规模船体的传输要求。全双工RS422接口,能够实现数据的输入输出功能。RS485接口可以作为输出的应用环境下。
3航向系统应用
本系统可装配在各种船体、无人船、无人机上,为作业人员提供定位和航向功能。本系统提供两种数据传输方式:第一,可通过RS422/485,使用电缆线连接到主控制端/PC端,在应用软件上查看定位、航行状态;第二,可通过无线WIFI连接方式,使用带有WIFI功能的平板、笔记本电脑等,连接到设备端,同样使用应用软件查看船体/无人机的定位和航向。本系统需配套开发应用软件,软件协议接口需与本系统匹配。基本航向作业如图3。
本系统设计了自动巡航控制系统,适合应用在无人船、无人机上。通过基站控制端软件,预先设置测量的坐标范围和航向,把坐标、航向数据发送到测量设备上,利用自动巡航系统,完成对指定作业区域的测量工作。PC端软件导入在线/本地的待测地图后,在地图上对测量空间范围画出待测的区域和测量航向。通过无线网络(WIFI、4G网络),把测量地图传输到无人机上,无人机系统实时读取本系统传输过来的坐标和航向数据,能够在测量过程中调整定位和航行状态,完成对指定地图区域的测量工作。
自动巡航测量过程中,本地监控软件能够查看无人机的测量航线,如果出现偏移指定坐标和测量范围,本地端能够及时进行人工干预,调整测量航向。无人机测量过程中,测量数据实时更新在本地系统,完成对测量数据的加载。同时也可以在测量结束后,通过无线/有线连接到PC端,把数据下载到本地,在本地进行后数据处理和显示。无人机/无人船加本定位航向系统,能够实现自动巡航测量作业。相对于原来人工操控作业,该应用功能极大方便了测量作业,缩短了测量时间,提高了工作效率。
参考文献
[1] 李天文.GPS原理与应用[M].北京:科学出版社,2019.
[2] 钱晓捷,程楠.嵌入式系统导论[M].北京:电子工业出版社,2017.
猜你喜欢
新世纪智能(高一语文)(2021年3期)2021-07-16
保健医苑(2020年1期)2020-07-27
民用飞机设计与研究(2019年4期)2019-05-21
数学物理学报(2019年1期)2019-03-21
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16
电子制作(2017年24期)2017-02-02
高师理科学刊(2016年8期)2016-06-15
法大研究生(2015年2期)2015-02-27
