基于双目标优化的某转向系统轻量化设计
2020-10-21 11:19戚振杰崔世海胡海欧霍俊焱
天津科技大学学报 2020年5期
戚振杰 ,崔世海,胡海欧,霍俊焱,张 宁
(1. 天津科技大学机械工程学院,天津 300222;2. 中国汽车技术研究中心,天津 300300)
转向系统性能直接影响到汽车行驶平顺性和操纵稳定性;同时,行驶中驾驶员对方向盘的振动最为敏感,因此其对汽车的噪声、振动与声振粗糙度(NVH)性能影响也很大.汽车在行驶的过程中经常会在不平路面、不断变化的运动方向和车速以及不平衡的传动系统等激振的共同作用下,整车及车辆局部以及一些子系统会产生强烈振动.当上述激振频率和转向系统本身的固有频率接近时,共振现象就会发生.利用有限元方法分析转向系统的模态,基于优化方法使之避开共振频率,在改善模态的同时减轻其质量对纯电动汽车的转向系统设计开发具有重要意义.
李朔[1]围绕仪表盘横梁总成及方向盘管柱安装点研究了影响某车型转向系统模态的因素,最终解决了转向系统抖动的问题;汪东斌等[2]以改进的可行方向法对汽车转向系统一阶固有频率进行优化设计,在不增加转向系统质量的前提下,实现了转向系统一阶固有频率的提升;弓剑等[3]通过引入模态应变能分析法缩减白车身模态灵敏度分析样本,在实现了白车身模态优化目标的同时还尽量减少了增重;刘显春[4]利用 RBF神经网络近似模型采用遗传算法,在满足模态和刚度的性能要求下实现了减重的目标;俞云云等[5]利用拉丁超立方抽样,构建了Kriging代理模型,以桥壳总质量和整体最大应力最小化为目标,采用多目标优化算法对所建代理模型进行求解,得到驱动桥壳轻量化设计的最优方案.文献[1-2]只考虑了转向系统的模态优化,忽略了轻量化研究,文献[4-5]提供了基于近似模型的遗传算法进行轻量化设计的方法,但是只采用了一种实验设计方法.
本文在某纯电动汽车转向系统模态要求大于等于35Hz的前提下,采用正交实验设计和最优拉丁超立方实验设计相结合的方法,构建了转向系统的RBF近似模型.采用遗传算法对转向系统尺寸进行优化,在满足转向系统模态不低于设计要求的前提下,得到一种增重最小、不增重或者更轻的最优方案,以实现转向系统模态和质量的双目标优化.
1 转向系统模态分析
1.1 转向系统有限元模型描述
基于某纯电动汽车的转向系统 CAD模型,在HyperMesh中建立了如图1所示的有限元模型,模型包括方向盘、转向管柱及支架、驾驶员安全气囊,仪表板横梁、转向助力电机,主副仪表板等.白车身采用全约束方案,将转向系统有限元模型搭载在白车身上后,在Nastran求解器中进行CAE分析计算求解.
1.2 转向系统模态分析及验证
根据 CAE有限元分析结果,转向系统横向和垂向模态振型图分别如图2和图3所示.
为了保证后续模态分析及优化工作的可靠性,本文对在安装状态下的转向系统进行了实验模态分析.采用多点激励、多点相应的方法进行自由状态下转向系统模态实验,通过 LMS测试系统对模态参数进行识别.实验结果与计算模态的对比见表 1,可见二者误差不足5%,验证了有限元模型的准确性.

图1 转向系统在安装状态下的有限元模型Fig. 1 Finite element model of the steering system under installation state

表1 模态频率计算值与实验值的对比Tab. 1 Model frequency from calculation and experiment
企业要求转向系统的模态频率大于等于 35Hz,故原车的一阶横向模态频率和一阶垂向模态频率均不满足目标要求,易发生共振现象.原转向系统的模态频率低,可能是由于其某些部位结构较弱导致的,故首先引入模态应变能分析法,对结构薄弱位置进行分析.
2 转向系统模态应变能分析与优化
在转向系统有限元模态分析中,第i阶模态的第j单元的模态应变能(Eij)[6]定义为

式中:{ui} 为车身第i阶模态振型;[Kj]为j单元刚度矩阵.
从式(1)可见,单元模态应变能越高,局部的位移越大,结构的刚度就越低.在转向系统模态分析中,某阶模态频率下的模态应变能分布反映了其在该模态振型下变形集中区域,局部模态应变能的集中反映了在该阶振型下车身变形时局部刚度的不足,当车身受到外界激励时更容易产生变形.选取模态应变能作为评价车身动态刚度的指标,可以更有效地识别车身变形薄弱处,从而有针对性地加强结构,提高优化效率.
对上述建立的转向系统有限元模型进行模态分析,获取了转向系统第一阶垂向模态频率下的应变能分布如图 4所示,应变能集中在仪表盘横梁左半部分、左右安装支架、中间支架以及与中通道相连的两个支架处,说明这几处刚度较弱,在进行方案优化时应重点加强这些区域.

图4 一阶垂向模态频率21.9Hz下应变能分布Fig. 4 Strain energy distribution at first order vertical modal frequency 21.9Hz
由于一阶垂向模态频率21.9Hz与企业设定的目标值 35Hz相差较大,直接进行板件厚度优化,设计变量较多,优化效率低,故引入模态应变能分析并结合工程经验确定了以下的优化方案(图5).
方案一:仪表盘中间三角支架厚度由 1.5mm 增加到 3.0mm;方案二:与中通道相连的两个支架由1.5mm 增加到 3.0mm;方案三:CCB与车身连接处的左右安装支架的厚度由1.2mm增加到3.0mm,仪表盘横梁由一体式拆分为大管套小管形式,其中左边大管半径 28.5mm,厚度 3.0mm,右边小管半径23.5mm,厚度2.5mm;方案四:仪表盘横梁与三角支架间增加一个支架,厚度3.0mm.

图5 优化方案Fig. 5 Optimization scheme
根据上述优化方案,重新建立有限元模型后进行CAE计算分析,得到优化后转向系统的一阶横向模态频率为47.1Hz和一阶垂向模态频率为33.6Hz,如图6和图7所示.

图6 一阶横向模态振型图Fig. 6 The first horizontal modal shape

图7 一阶垂向模态振型图Fig. 7 The first vertical modal shape
通过对转向系统一阶垂向模态频率下的应变能分布,即薄弱点位置分析,最终采用第一阶段(TG1)的 4种优化方案后转向系统横向模态频率提升为47.1Hz,满足目标要求;但垂向模态频率为 33.6Hz,仍不满足目标要求,且优化后质量增加了 5.5kg,增重较多,不符合小型纯电动汽车轻量化的要求.因此,需要对转向系统的垂向模态和质量最轻这两个目标进行第二阶段(TG2)的双目标优化.
3 转向系统轻量化设计
3.1 设计变量的选取
在保证转向系统模态满足设计目标的前提下,为了实现良好的减重效果,选取仪表盘左右两个横梁、横梁上所有支架、横梁左右安装支架、方向盘转向柱中间部位多个安装支架、中通道所有安装支架的厚度等共 18个设计变量(x1—x18),设计对象如图 8所示,设计变量参数见表2.

图8 设计对象Fig. 8 Design object

表2 设计变量参数Tab. 2 Parameters of design variables
3.2 实验设计
为缩短转向系统多目标优化时间,厚度设计变量与转向系统横向模态和垂向模态指标间的对应关系需要通过建立近似模型来拟合,这就需要通过合理的实验设计获得大量的样本数据.正交实验[7]是从所有的样本点中挑选出正交、均匀的样本点进行的实验设计,是一种快速、高效、经济的设计方法,具有“均匀分散,齐整可比”的特点,可以大大减少实验分析次数.拉丁超立方实验设计[8]基本上是一种对抽样分布全面分层,再从每层中随机取值的方法.它是专门为仿真实验提出的一种实验设计类型,常用于采样大型设计空间,是一种充满空间设计,可以用较少样本点填满足够大的空间,其在非线性数据拟合方面更具优势;但也存在实验点分布不够均匀,且随着水平数的增加,丢失设计空间一些区域的可能性也增加的缺点.最优拉丁超立方抽样可以弥补这一缺点,进一步改善均匀性,使因子和响应的拟合更加精确真实.本文采用正交实验设计和最优拉丁超立方实验设计相结合的方法,在 Isight软件中运用正交实验方法生成初始样本矩阵,在此基础上进行最优拉丁超立方抽样,从而使优化的样本矩阵更加正交化、均匀化.
综上,得到转向系统不同参数组合下的样本点,并计算输出对应样本点x1的响应数据 64个,分别见表 3和表 4,其中表 3中x1、x2、…、x18代表设计变量;表4中m代表转向系统质量,f1代表转向系统一阶横向模态频率,f2代表一阶垂向模态频率.
3.3 近似模型的建立
径向基函数[9](radial basis function,RBF)是一种多变量空间插值方法,可以表示为径向对称基函数的线性加权的形式.RBF 近似模型有许多优点,比如它有良好的非线性逼近性,在收敛的情况下,有收敛快、计算稳定等优点,故本文基于 18个设计变量和拉丁超立方抽样数据以及响应数据,在 Isight软件中构造了关于转向系统质量、一阶横向频率、一阶垂向频率的RBF模型,并另外选取15个样本点来检验近似模型的精度.图9、图10和图11分别为检验转向系统质量、横向模态和垂向模态的近似模型时 15个测试样本的预测值和实际值所构成的散点图.

表3 转向系统最优拉丁超立方抽样样本点Tab. 3 Optimal Latin hypercube sampling points of the steering system

表4 转向系统样本模型的响应数据Tab. 4 Response data of the steering system sample model

图9 转向系统质量近似模型测试样本散点图Fig. 9 Test sample scatter plot of the steering system quality approximation model

图10 转向系统横向模态近似模型测试样本散点图Fig. 10 Test sample scatter plot of the steering system horizontal modal approximation model

图11 转向系统垂向模态近似模型测试样本散点图Fig. 11 Test sample scatter plot of the steering system vertical modal approximation model
表 5为分别采用正交实验设计和最优拉丁实验设计以及两种实验设计相结合的方法分别得到的转向系统质量、横向频率、垂向频率的相关系数 R2,R2取值范围[0,1],该值越接近于 1说明模型精度越高.可以看出,采用正交和最优拉丁相结合的实验设计方法构建的 RBF模型的拟合精度较高,能够代替有限元模型进行多目标优化,同时也说明了利用正交实验设计与最优拉丁超立方设计方法进行抽样可以使抽样结果更加均匀化、正交化,拟合的精度更高.

表5 近似模型的精度评价Tab. 5 Accuracy evaluation of the approximation model
3.4 优化设计
转向系统轻量化优化设计要在满足其一阶横向模态的同时,既要将其一阶垂向模态频率提升至35Hz以上,又要保证质量最轻,故将转向系统的质量最小和垂向模态频率最大作为优化目标,一阶横向模态频率大于35Hz作为约束条件,数学模型为

式中:mmin(xi) 为质量最小目标函数;f2max(xi)为一阶垂向模态频率最大目标函数;f1(xi)为一阶横向模态频率约束函数;xi为设计变量;xiu、xid分别为设计变量上限和下限.本文选择 NSGA-Ⅱ遗传算法[9],对所建立的转向系统近似模型进行双目标优化求解.所谓的遗传算法是将父种群在进化过程中做交叉和变异,从而得到子种群,并合并两个种群;依据非劣解关系对种群中两个个体进行比较,从而使所有个体依次分成多个控制前沿层.并且,NSGA-Ⅱ还具有适应度共享的特征,即为处在同一层的制定同样的适应度,使得群体在进化过程中始终保持多样性,避免群体过早收敛于少数个体上,即早熟收敛.经过多次尝试,本文设置 NSGA-Ⅱ遗传算法的种群个体为 180、交叉的概率为 0.9、变异的概率为 0.05、进化代数为48代时,优化结果最理想.最终经过一段时间的计算后优化终止.迭代过程如图12、图13和图14所示,共经过25次优化迭代后得到结果.

图12 转向系统横向模态迭代过程Fig. 12 Iterative process of the steering system horizontal modal

图13 转向系统垂向模态迭代过程Fig. 13 Iterative process of thesteering system vertical modal

图14 转向系统质量迭代过程Fig. 14 Mass iterative process of the steering system
为了实现在满足转向系统横向模态频率以及垂向模态频率均大于等于 35Hz要求的前提下质量尽可能轻这一目标,故选取第 23步的优化解作为最优方案,综合考虑制造工艺性要求,得到优化后的设计变量见表6.
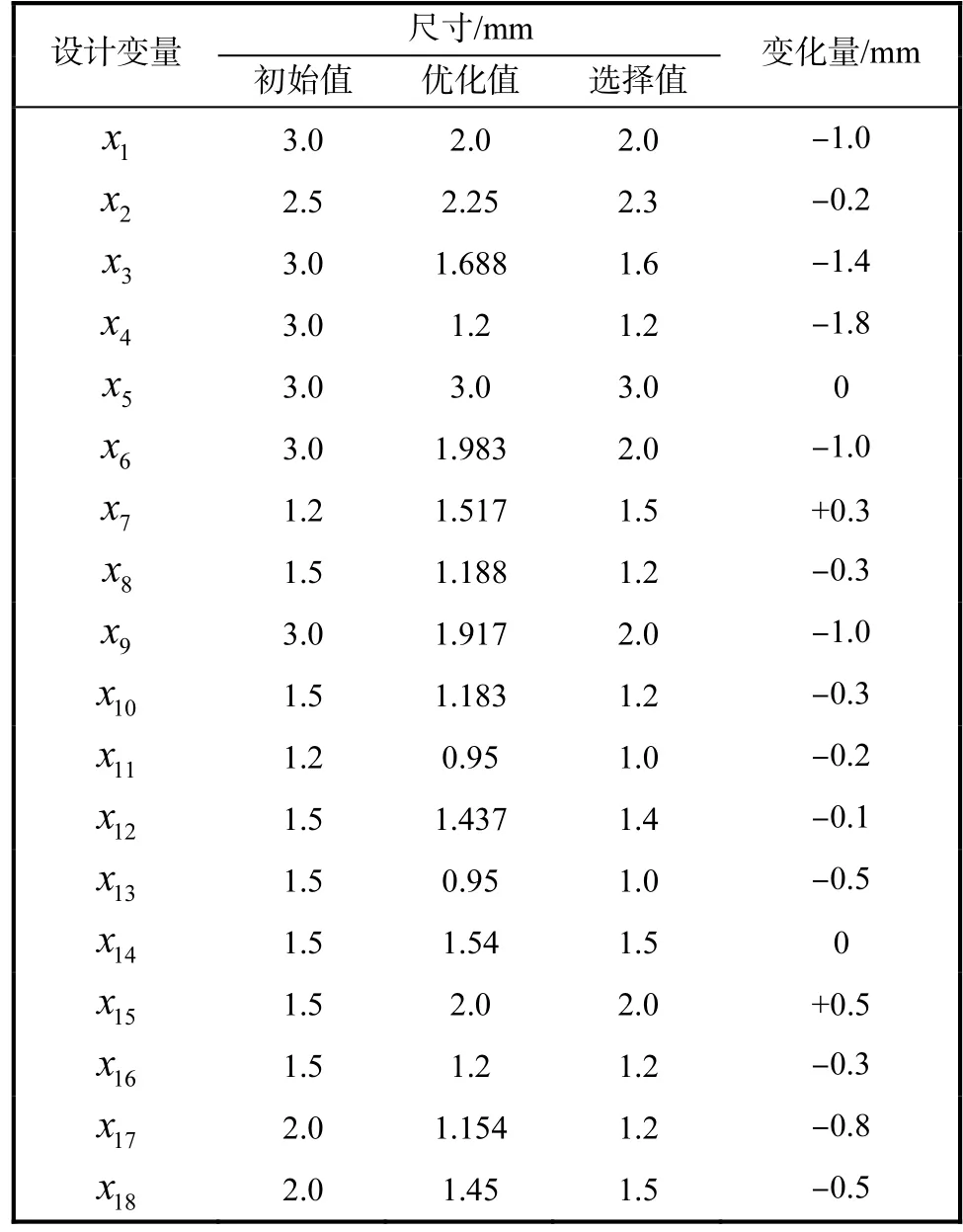
表6 轻量化前后设计变量尺寸变化Tab. 6 Variable changes before and after reducing weight
将优化后的设计变量在转向系统模型中更新后进行仿真计算,得到转向系统质量、一阶横向模态频率 44.6Hz和一阶垂向模态频率 35.4Hz,如图 15和图 16所示,并与轻量化设计前的转向系统性能指标进行对比,见表 7.由表 7可知:经过两个阶段的优化,转向系统一阶横向模态频率和垂向模态频率均满足目标要求,且质量由 125.24kg降至 121.97kg,增重率由4.6%降至1.9%,轻量化效果明显.

图15 一阶横向模态振型图Fig. 15 The first horizontal modal diagram
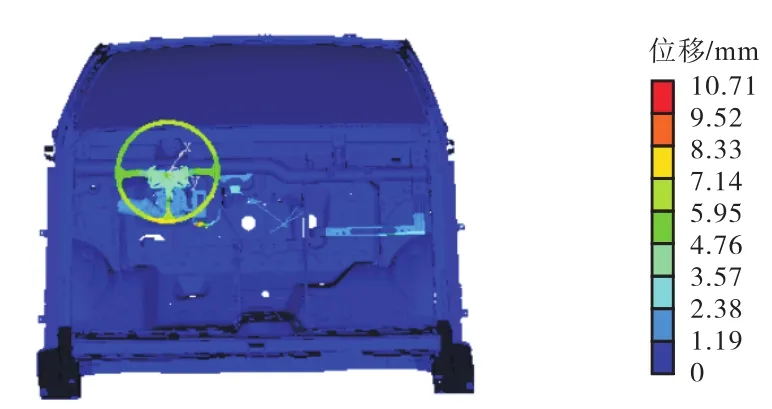
图16 一阶垂向模态振型图Fig. 16 The first vertical modal diagram

表7 轻量化设计前后转向系统性能指标对比Tab. 7 Comparison of performance indicators of the steering systems before and after reducing weight
4 结 语
本文首先引入模态应变能的方法找到转向系统薄弱点位置进行优化,使转向系统模态频率满足了设计要求.然后在正交实验方法生成的初始样本矩阵基础上进行最优拉丁超立方抽样,并结合径向基神经网络近似模型和多目标遗传算法对转向系统进行轻量化设计.最终的优化方案使转向系统一阶横向模态频率由33.4Hz提升至44.6Hz,一阶垂向模态频率由21.9Hz提升至35.4Hz,而转向系统质量仅增加了2.27kg,实现了转向系统模态和质量的双目标优化.
猜你喜欢
汽车实用技术(2022年11期)2022-06-20
汽车实用技术(2022年10期)2022-06-09
昆明医科大学学报(2022年3期)2022-04-19
幼儿画刊(2021年11期)2021-11-05
幼儿画刊(2021年10期)2021-10-20
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
幼儿画刊(2020年2期)2020-04-02
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
幼儿画刊(2018年4期)2018-04-11