基于遗传算法的输电线路弧垂计算非线性自修正方法
2020-10-23 02:11刘沛轩程养春岳楹超戴沅
广东电力 2020年9期
刘沛轩,程养春,岳楹超,戴沅
(1. 高电压与电磁兼容北京市重点实验室(华北电力大学),北京 102206; 2.新能源电力系统国家重点实验室(华北电力大学),北京 102206;3. 广东电网有限责任公司电力科学研究院,广东 广州 510080)
智能电网的发展对如何及时获知输电线路状态,准确采集线路数据提出了更高的要求[1-2]。在多种线路数据之中,线路弧垂数据直接关系着线路的安全运行。架空线路弧垂过大会导致对地交叉跨越距离过小,对人身财产安全造成威胁;弧垂过小会导致导线承受的应力过大,气温过低或冻雨天气时,有可能造成断线甚至电杆倾覆事故。因此,对导线弧垂进行准确监测具有重要意义[3-5]。
早期各电网公司的弧垂测量工作主要都是靠人工计算以及定期巡查,所采用仪器也以测距杆、经纬仪居多。这种方法存在人工读数误差,且劳动强度大,工作条件差,效率低[6]。目前国内外大多利用监测导线倾角、应力以及温度等物理量来间接测量导线弧垂[7]。通过倾角计算弧垂时,虽然准确度很高,但倾角测量结果存在着传感器安装所造成的初始误差可能性,并且受风速影响较大,不如温度和应力测量稳定;通过应力计算弧垂时,部分应力传感器的安装需要改变现有导线结构,存在安全风险;通过温度计算弧垂时,温度传感器所在位置的温度与整条线路的平均温度存在误差,也存在与传感器安装方式相关的系统性误差,且测量结果易受气候条件影响。
近年来国内外的研究方向为:利用图像识别方法对导线照片进行分析,获取弧垂[8];采用GPS定位输电导线的最大弧垂[9-10];借助激光雷达扫描线路,测量线路弧垂与交叉跨越距离[11-15]等。由于设备精度限制,任何测量方式都存在一定的系统误差[16-17],以上方法的共同缺点是无法方便快捷地修正弧垂测量时的系统误差[18-20]。
本文针对现有弧垂测量方式的共性问题,提出同时测量温度与倾角,利用其相互独立的特性分别计算弧垂并加以对照,修正彼此的系统误差,提高弧垂测量精度。
1 系统误差求解模型的建立及其求解方法
本文利用线路倾角与温度数据,分别经由导线抛物线方程与导线状态方程计算线路弧垂;随后在方程中引入代表系统性误差的未知参数,得到2个含有多个未知参数的非线性方程;最后以非线性参数估计理论为指导,结合遗传算法,给出系统误差求解模型的求解方法。
1.1 倾角-弧垂计算模型
现有的倾角-弧垂计算模型主要有3种:悬链线方程、斜抛物线方程和平抛物线方程。本文采用斜抛物线方程[19],即
(1)
式中:fM1为导线最大弧垂;σ0为各点水平应力分量;x为倾角测点与杆塔悬挂点之间的距离;γ为档距内导线比载;l为水平档距;β为导线悬挂点连线与水平线的夹角;θ为测得的导线倾角。
倾角传感器测量时,不可避免会存在系统误差与随机误差。随机误差主要来源于风吹引起的导线摆动,在长时间的监测中,可以通过取平均值的方式消去;系统误差则通过在式(1)中引入未知参数进行修正,修正后的导线最大弧垂
(2)
式中:x1为导线倾角传感器测量结果的一次修正项;x2为常数修正项。
1.2 温度-弧垂计算模型
现有的钢芯铝绞线的温度-弧垂计算模型[20]为
(3)
式中:σn、γn、Tn分别为状态n下的水平应力、比载和温度;σm、γm、Tm为状态m下的水平应力、比载和温度;E为钢芯铝绞线的总弹性模量;α为钢芯铝绞线的热膨胀系数。
在已知初始温度与导线初始水平应力的情况下,只要给出任一时刻的导线温度,即可由状态方程计算得到对应的导线水平应力,并进而由式(1)计算导线弧垂。
假设导线初始温度为T0=20 ℃,对应的倾角为θ0,将状态方程左边看作初始状态,根据式(1),水平应力σn可用初始倾角θ0代入;同时将状态方程右边看作待求状态,根据式(1),水平应力σm可用待求弧垂fM2代入,即

(4)
温度传感器测量时,同样会存在系统误差与随机误差,其中随机误差可以通过取平均值的方式消去,系统误差则通过在式(5)中引入未知参数进行修正,即
(5)
式中:x3为当温度为20 ℃时对应的输电导线初始倾角;x4为输电导线温度的一次修正项;x5为输电导线温度的常数修正项。
1.3 系统误差求解模型
为有效地求解上文引入的系统误差,提高线路弧垂计算的准确度,本文建立含有未知参数的非线性方程,运用非线性参数估计的方法,求解得到一段时间内的未知参数。
1.3.1 非线性参数估计
误差分为随机误差与系统误差:随机误差如风吹导致的导线摆动对弧垂的影响,可以通过多次测量求平均值的方法加以消除;而对于未知的系统误差,需要通过现场实测数据来求解误差的具体数值,再加以修正。这些系统性误差与测量值之间可能存在复杂的关系,需要对非线性方程进行参数估计。
非线性模型参数估计是线性模型参数估计的自然推广,其研究始于20世纪60年代初期,并在80年代由加拿大统计学家Bates和Watts引入曲率度量以后得到较快发展。非线性模型参数的估计准则主要有最小二乘估计准则、极大似然估计准则、稳健估计准则及贝叶斯准则等,其中应用最广泛的准则是最小二乘准则。非线性模型参数估计的解算方法包括最小二乘类近似解法、迭代解法、直接解法及单纯形法、粒子群算法和遗传算法等。
本文对非线性方程采用最小二乘估计准则,并结合遗传算法进行求解。求解过程中需要尽可能多组数据作为求解数据集,以减弱单组异常数据对求解的影响。
1.3.2 系统误差求解模型的建立
本文的非线性方程中仅考虑了误差的常数项和线性项,忽略了高次项。首先建立关于未知参数的矩阵等式
L=f(X)+Δ.
(6)
式中:L为测量值向量(已知值);X为未知参数向量;f(X)为关于X的非线性函数;Δ为测量误差向量(期望值为0的未知随机量)。求解X就是求解式(6)的最小二乘解,使得误差向量Δ的模值最小。
通过将倾角数据计算弧垂的式(2)与温度数据计算弧垂的式(5)相加,可得出非线性函数
αE(x4Tm+x5-T0).
(7)
易知f(X)的期望值为0,故测量值向量L=0。代入已知的倾角与温度数据,运用遗传算法迭代求解,找出使误差向量Δ取最小值的最小二乘解向量X,即为所求的未知参数。假设初始温度T0为20 ℃,各未知参数的取值范围以及物理意义见表1。

表1 误差求解模型中未知参数的取值范围与物理意义Tab.1 Value ranges and physical meanings of unknown parameters in system error solving model
1.3.3 非线性方程的解算方法
含有多个未知参数的非线性方程式(7)较为复杂,常规方法难以应对。本文利用线路实测数据,采用智能优化算法对其进行迭代求解。
当前智能优化算法的种类繁多,各有优劣。本文需要求解的模型包含5个未知参数,对算法的求解效率要求不高,因此选择较为成熟常用的遗传算法对弧垂修正模型进行迭代求解,其优点为适用性广、鲁棒性好,易于与其他算法进行结合改进。
2 现场实例验证
2.1 现场数据来源
2.1.1 DTRT-1型在线监测装置
本文所用现场数据均来自于DTRT-1型在线监测装置,该装置由华北电力大学与广东电网有限责任公司电力科学研究院等单位共同研究开发,并已于2013年在广东电网多条高压线路挂网运行(如图1所示)。该装置自2013年上线运行以来,每隔2 min对线路状态进行1次测量,并将数据实时发送至服务器。

图1 DTRT-1型装置现场安装场景Fig.1 Scene of field installation of DTRT-1
DTRT-1型在线监测装置配有导线倾角传感器与导线温度传感器,两者测量所得数据可分别独立计算得出导线弧垂,其中温度传感器测量误差小于0.3 ℃,倾角传感器动态误差小于0.10°,静态误差小于0.05°。
在现场实际应用过程中,温度传感器并不是位于导线内部,而是紧贴在导线绝缘外皮上,因此所测数值与实际导线温度之间存在误差,且易受环境散热条件影响;另一方面,倾角传感器对精度要求较高,在线路覆冰和金具磨损时易产生误差。因此,温度传感器与倾角传感器的数据在独立计算弧垂时并不可靠,存在未知的系统误差。使用DTRT-1型装置获得倾角数据与温度数据之后,将两者联合应用,互为对照,修正彼此的误差,以此提升弧垂计算准确性。
2.1.2 安装情况简介
2013年11月在某110 kV九园乙线的23号塔至24号塔档距C相上安装了2只DTRT-1型装置(编号分别为66、61),在110 kV九园甲线的20号塔至21号塔档距C相上安装了2只DTRT-1型装置(编号分别为63、67),上述装置至今仍在运行。
本文所用数据主要来自于110 kV九园乙线上的61号装置,现场安装场景如图1所示,线路档距如图2所示。

图2 DTRT-1型装置所在线路档距Fig.2 Spans of the line where DTRT-1 is located
九园乙线的导线型号为LGJX-300/25,导线弹性模量E=65 000 N/mm2,架空线档距l=345 m,线膨胀系数α=2.05×10-5℃-1,比载=0.031 11 N/(m·mm2),悬挂点连线与水平线的夹角正切值tanβ=0.014 5,倾角传感器中轴线与复合绝缘子在塔头的悬挂螺丝距离x=2.45 m。
2.1.3 现场数据
DTRT-1型装置每隔2 min对线路状态进行1次测量,并通过GPRS向网络服务器发送数据。为了展示现场数据的时间跨度,表2中包含了61号装置在2014年中不同月份的部分监测数据,其中每行数据包括导线温度T1,钢芯铝绞线倾角和对应的日期。

表2 部分现场数据Tab.2 Partial field data
为了体现现场数据的连续性与数据密度,图3展示了61号装置在2014年5月31日连续24 h的现场在线监测数据。可以看到倾角数据与温度数据存在相同的变化趋势,证明传感器工作状态正常,所得数据基本可信。
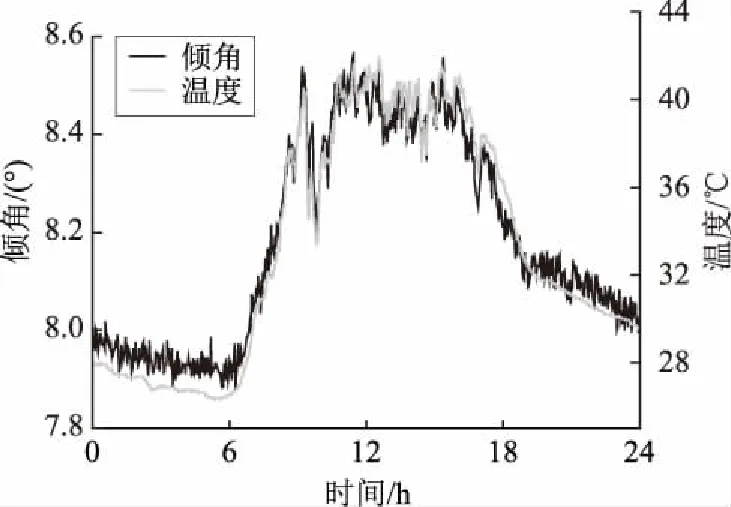
图3 61号装置2014年5月31日现场数据Fig.3 Field data of device 61 on May 31, 2014
2.2 现场实例验证
本文首先从海量现场数据中筛选出某2 d较为完整连续的数据,以此验证弧垂修正模型的准确性。随后将1 年中各个月份的数据分别进行修正,以此验证弧垂修正模型的普适性与稳定性。
2.2.1 2014年5月31日数据验证
采用九园乙线61号装置在2014年5月31日内连续24 h的监测数据构建式(6)的矩阵。数据见表3。该数据集中,导线温度T1在26~33 ℃之间,倾角θ在7.9°~8.2°之间,变化幅度均较大;因此,需要将数据误差对非线性方程迭代求解结果的影响尽可能降低。
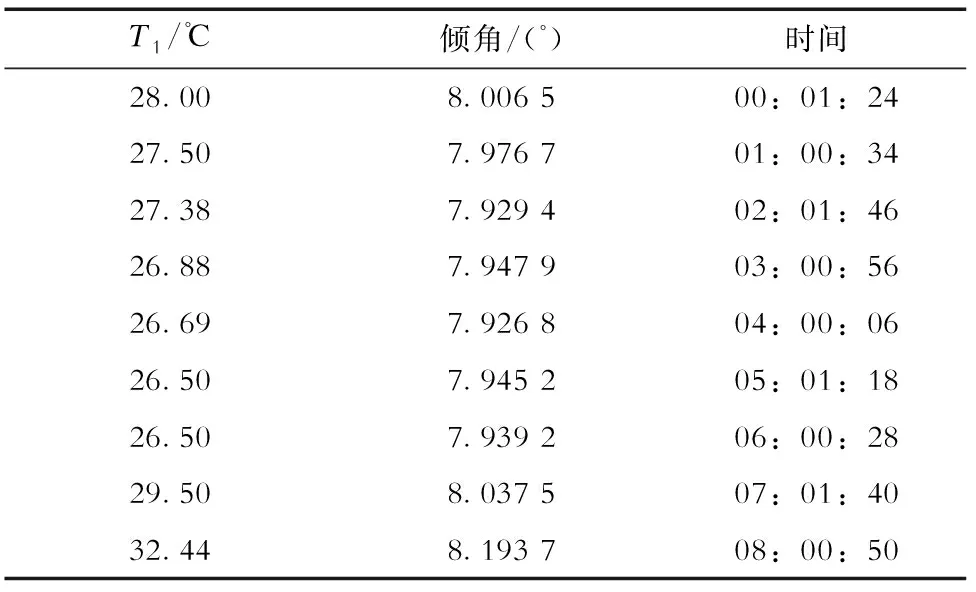
表3 2014年5月31日训练数据典型集Tab.3 Typical training data set on May 31, 2014
在未经修正之前,利用倾角-弧垂计算模型和温度-弧垂计算模型分别获得的导线弧垂曲线如图4所示。
由图4可以看到,利用2种不同方式计算所得弧垂曲线并不一致,存在较明显的差别。本文基于MATLAB利用遗传算法编写程序对其进行修正,运行遗传算法程序经过约100次迭代后达到稳定解,获得的未知参数向量X最优解见表4。将表4中的最优解代入式(7),得到误差向量Δ的期望值为1.030 7×10-4m,相当于导线弧垂均值11.349 7 m的0.000 9%;均方根误差为0.055 7 m,相当于导线弧垂均值的0.5%,如图5所示。结果说明基于非线性参数估计-遗传算法求得的表4中的未知参数比较准确,对原本误差较大的数据起到了较好的修正作用。

图4 2014年5月31日修正前弧垂曲线对比Fig.4 Comparison of sag curves on May 31, 2014 before correction

图5 2014年5月31日修正后弧垂曲线对比Fig.5 Comparison of sag curves on May 31, 2014 after correction

表4 2014年5月31日数据收敛结果Tab.4 Data convergence results on May 31, 2014
2.2.2 2014年4月22日数据验证
采用九园乙线61号装置在2014年4月22日内连续16 h的监测数据构建式(6)的矩阵。数据典型集见表5。该数据集中,导线温度T1在26~33 ℃之间,倾角在7.9°~8.2°之间,变化幅度均较大;因此,应将数据误差对非线性方程迭代求解结果的影响尽可能降低。

表5 2014年4月22日训练数据典型集Tab.5 Typical training data set on April 22, 2014
修正前、后2种弧垂曲线对比如图6、7所示。

图6 2014年4月22日修正前弧垂曲线对比Fig.6 Comparison of sag curves on April 22, 2014 before correction
获得的未知参数向量X最优解见表6。将表6中的最优解代入式(7),进一步处理后可以得到误差向量Δ的期望值为1.758 4×10-4m,相当于导线弧垂均值11.107 9 m的0.001 6%;均方根误差为0.046 7 m,相当于导线弧垂均值的0.42%,如图7所示。结果说明基于非线性参数估计-遗传算法的修正方法具有较高的准确性,对不同时间的数据都能有效进行修正。

图7 2014年4月22日修正后弧垂曲线对比Fig.7 Comparison of sag curves on April 22, 2014 after correction

表6 2014年4月22日数据收敛结果Tab.6 Data convergence results on April 22, 2014
2.2.3 多个月份的弧垂修正效果
事实上,本文所求未知参数并不是一成不变的。与温度传感器相关的未知参数会受设备老化的影响,同时与倾角传感器相关的未知参数也会受线路覆冰和杆塔金具磨损的影响。
由于未知参数会随时间发生变化,因此需要定期重新计算未知参数,以保证弧垂的计算准确度。利用110 kV九园乙线61号装置在2014年至2015年所监测到的数据,分别求解其在各个月份内修正前后的导线弧垂误差值,所得误差量占线路弧垂期望值百分比的变化如图8所示;其中误差期望值(平均值)占比始终小于1%,均方根误差占比始终小于5%。

图8 导线弧垂均方根误差百分比变化曲线Fig.8 RMSE percentage curves of line sag
3 结束语
利用输电线路上的温度传感器与倾角传感器计算弧垂时,传感器的安装方式与测量精度等因素,不可避免地会产生系统性误差,影响线路弧垂和导线的安全对地交叉跨越距离的精确计算。本文首先给出倾角-弧垂计算模型和温度-弧垂计算模型,并在此基础上引入系统性误差,建立含有未知参数的非线性方程,即系统误差求解模型。随后以非线性参数估计理论为指导,结合遗传算法给出计算方法;最后利用DTRT-1型在线监测装置所采集的现场数据进行实例验证。实例验证表明,修正传感器系统性误差之后,弧垂计算准确度得到了明显提升。
本文分析认为系统性误差并不固定,而是随着时间发生变化,为此利用多个月份的数据分别求解,得到各个月份的修正结果。在多个月份的修正结果中,导线弧垂的平均误差小于1%,均方根误差小于5%,从而说明该方法具有良好的准确性和稳定性,可有效修正弧垂测量过程中的系统性误差,提高弧垂计算准确度,保证对地交叉跨越的安全。不仅如此,在其他存在系统性误差工程实际测量场合,均可应用此思想,通过测量2个或多个相互独立的物理量,建立相互对照的修正模型,提高测量精度。
猜你喜欢
Journal of Palaeogeography(2022年1期)2022-03-25
快乐语文(2021年35期)2022-01-18
科学大众(2021年19期)2021-10-14
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
北京航空航天大学学报(2017年4期)2017-11-23
摄影之友(影像视觉)(2017年1期)2017-07-18
中国惯性技术学报(2017年1期)2017-06-09
系统工程与电子技术(2016年7期)2016-08-21
制导与引信(2016年3期)2016-03-20