
基于雷达的道闸控制系统设计与实现
2020-10-24 07:59何桂兰张春阳赵世丽
科学咨询 2020年31期
何桂兰 张春阳 赵世丽
(重庆电子工程职业学院 重庆 401331)
随着智能识别技术的发展,现有停车道闸系统在生活中的应用已经非常普遍。各大小区及停车场均安装有道闸。该停车道闸系统的工作过程为:当有车辆需要通过道闸入场时,与道闸连接的摄像头会抓取车辆的图像,接着利用图像识别技术对该图像进行识别,自动完成车辆的入场信息登记,即车辆的牌照信息、车辆入场时间和入场车辆图像等信息,在完成之后道闸便会控制栏杆抬起,让车辆入场[1]。
当车辆需要通过道闸出场时,停车道闸系统一般采用地感线圈或雷达来判断车辆是否已经通过栏杆,以此控制栏杆的下降。不过,地感线圈不能有效检测车辆外的其他非金属物体是否经过栏杆,缺乏一定的可靠性且安装时需要将地感线圈埋于地下,会破坏路面。因此,本文提出一种采用雷达检测来判断障碍物(如车辆、人员)是否离开进而控制道闸下降的控制系统。采用雷达检测可以检测到能够返回雷达波的障碍物,相对地感线圈的检测方式,检测范围广。与红外雷达相比,成本低廉。
一、雷达技术概述
雷达,是英文Radar的音译,源于radio detection and ranging的缩写,意思为“无线电探测和测距”,即用无线电的方法发现目标并测定它们的空间位置。因此,雷达也被称为“无线电定位”。雷达是利用电磁波探测目标的电子设备。雷达发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离信息[2]。
本文采用44KHZ的雷达,发射电磁波后开始计时,直到接收到电磁波返回或超过一定时长后停止计时。通过所记时长与电磁波速度相乘即可测得障碍物的距离。
二、雷达道闸系统组成
雷达道闸系统主要包括六个部分:电源转换模块,雷达检测模块,读写控制模块,外部信号电压稳定模块,道闸电机控制模块,声音报警模块。通过电源转换模块来为整个控制系统提供稳定的电源,使用雷达检测模块和读写控制模块检测和存储读取距离数据,外部信号稳压模块用来对外部信号进行滤波处理,使得获取的状态信息稳定可靠,通过道闸电机控制模块实现栏杆的下降和防砸控制。
(一)硬件电路设计
雷达道闸系统硬件设计主要包括六个部分:电源转换模块,雷达检测模块,读写控制模块,外部信号电压稳定模块,道闸电机控制模块,声音报警模块。

图1 读写控制模块
读写控制模块是整个系统的核心,是由PIC16 F721芯片构成,拥有高性能的RISC CPU,可达4K*14字的Flash程序内存,以及多达256字节的数据储存器(RAM),同时有较多的IO口提供给系统使用。PIC16 F721芯模块可对道闸进行障碍物的距离计算,并对雷达检测模块、读写控制模块、外部信号电源稳定模块、道闸电机控制模块、信号报警模块起控制作用。

图2 电源转换模块
电源转换模块采用MP2451DT稳压器模块,MP2451DT是一个高频(2MHz)降压开关调节器与集成内部高侧高电压MOSFET功率。它提供单一的0.6A(或更少)高效输出与电流模式控制的快速循环响应宽3.3V到36V输入范围适应各种降压应用输入环境。将输入的12V的电压转化为5V电路工作电压。
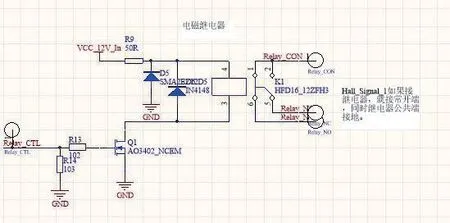
图3 道闸电机控制模块
道闸电机控制模块:读取控制模块将从雷达读取判断障碍物的信号转化为高低电平传输给电磁继电器,道闸电机控制模块根据高低电平信号来控制杆起杆落。
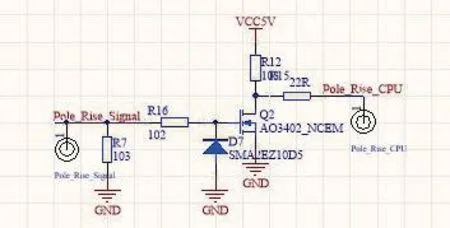
图4 外部信号传入模块
外部信号传入模块:将外部传输的两个霍尔信号和杆上升的信号传输给PIC16 F721读写控制芯片,由于外部电压具有不稳定性,该模块的设计就是掉电多余的电压,使外部信号的电压以5V的稳定电压输入给芯片。
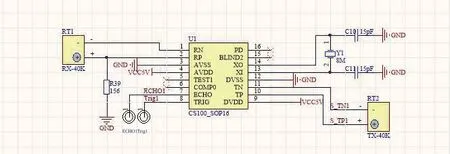
图5 雷达检测模块
雷达检测模块将雷达感受到的障碍物信号反馈到芯片,读取控制模块根据雷达反馈的信号计算障碍物的距离,距离值越大就代表没有障碍物,值越小就代表有障碍物,读取控制模块就根据距离值判断有无障碍物,并根据距离值的大小发送控制杆起杆落的信号给道闸控制模块。
整个道闸系统的电路设计设计了两个雷达,能更高效更准确地接受外界的信号。雷达检测模块的Trigl信号控制雷达工作,ECHO1是雷达传输给读取控制模块的信号。
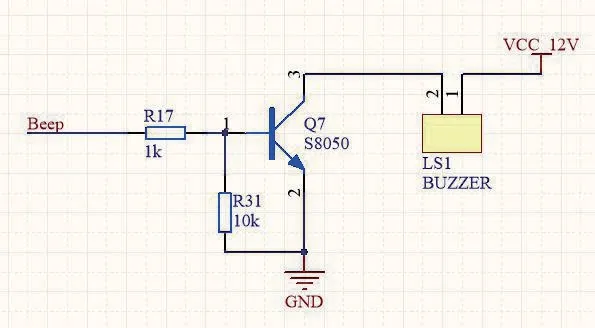
图6 声音报警模块
声音警报模块设计为一个三极管和蜂鸣器,在道闸工作的时候发出蜂鸣提醒。
(二)软件设计
雷达道闸系统软件由三部分组成,分别是距离标定模块,时长标定模块和雷达道闸控制模块。
距离标定模块用于标定雷达判断障碍物是否存在的使用距离。标定时,抬起道闸栏杆以免造成干扰,将栏杆误判断为障碍物。在雷达前方N米位置摆放一个障碍物,开启雷达发送电磁波,同时打开计时器。雷达接收到返回的电磁波后,关闭计时器。记录此时前后的时长,即可表示为N米的距离。在使用时,若检测到的距离大于N米,雷达道闸系统判断为N米位置内不存在障碍物,小于N米时,存在障碍物,返回信号。此模块的使用距离可由使用者任意标定。
时长标定模块用于标定栏杆抬起到不影响雷达判断的起杆时长和下落到影响雷达判断的落杆时长。由于部分道闸栏杆带有广告牌或栅栏等,因此在栏杆抬升的过程中,打开雷达,雷达的电磁波会遇到栅栏后返回,使得雷达误判断为障碍物存在。因此,需要在栏杆抬升到不会影响雷达电磁波的时候才开启雷达检测,下降过程同理。
栏杆开始抬升时,打开计时器,开启雷达检测,此时雷达会检测到存在有障碍物。栏杆继续抬升至某一位置时,雷达检测到障碍物消失。关闭计时器,记录此过程的时长,即为起杆时长。
栏杆开始下降时,打开计时器,开启雷达检测,此时雷达检测到不存在障碍物。栏杆继续下降至某一位置时,雷达检测到障碍物,关闭计时器,记录此过程时长,即为落杆时长。
上述两个过程进行时长标定时,需在无干扰的情况下进行,若在栏杆上升或下降的过程中有车辆经过,此时标定时长无法正常使用。
雷达道闸控制模块用于控制栏杆抬起后,检测到障碍物经过并离开后,使得栏杆下降。接收到外部的栏杆抬杆信号后,经过起杆时长,打开雷达开始进行检测障碍物是否进来,若没有检测到障碍物,控制继电器输出低电平,返回上一步骤,继续检测障碍物是否进来。检测到障碍物后,控制继电器输出高电平,然后检测障碍物是否离开。若障碍物没有离开,继续控制继电器输出高电平,返回上一步骤检测障碍物是否离开。若障碍物离开,控制继电器输出低电平,此时会产生一个由高电平变为低电平的下降沿脉冲信号,会使得栏杆开始下落[3]。
在下落过程中,继续使用雷达检测障碍物是否进来,若检测到障碍物,控制继电器输出高电平,此时又会产生一个由低到高的上升沿脉冲信号,会控制栏杆上升,以免继续下落出现砸车或砸人现象,起保护作用,之后再重复下落过程中检测障碍物的步骤。若没有检测到障碍物进来,经过落杆时长后,关闭雷达,停止检测。栏杆下降到底后结束一个工作周期,等待下一工作周期的开始。

图7 雷达道闸工作流程图
三、结束语
本文提出的雷达道闸系统通过获取道闸栏杆的状态信息,并在该状态信息发生变化时获取障碍物检测的雷达信号,然后利用雷达信号检测道闸栏杆在升降过程中是否存在障碍物,据此向控制道闸栏杆升降的继电器发送控制信号,从而可以在不影响现有停车道闸系统正常功能的情况下,实现对道闸栏杆升降控制的升级,具有与现有产品较好的兼容性与低成本性。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
空间科学学报(2021年6期)2021-03-09
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
