无人机姿态误差对目标定位的误差分析∗
2020-11-02 09:00石章松吴中红
计算机与数字工程 2020年9期
吴 昊 石章松 吴中红
(海军工程大学 武汉 430033)
1 引言
近年来,海军为夺取制空制海权,在平台和装备建设上取得很多成绩,其战略思想着重强调了海上火力支援的能力,发展了“垂直包围”、“舰对目标的机动”、“超视距登陆”、“空海一体登陆”等一系列战法[1]。在舰艇大口径火炮对岸进行精确打击时,受制于传统传感器的限制,不能对目标进行实施跟踪定位,因此采用无人侦察机对远程目标进行前沿侦查,为舰载武器提供精确的目标位置信息,引导制导弹药实施精确的对岸打击[2]。无人机对制导弹药进行保障射击主要有如下优势:一是能在终端屏幕上不间断的为指挥员提供目标信息;二是利用无人机传感器侦察确定目标坐标的精度高;三是能够保障舰炮实现对地面观察不能观察目标及敌纵深目标的打击任务等;四是结合精确制导弹药,弥补了各类武器由于侦察手段不足所导致的打击毁耗弹量大、伤概率低等问题[3~4]。
但在无人机对制导弹药进行保障的条件下,由于无人机姿态角度误差(航向角φ、俯仰角θ、滚转角γ)的存在,测量得到的目标位置与实际位置存在一定偏差,导致远程大口径舰炮对目标不能进行精确打击,为解决上述问题,本文主要对无人机姿态误差对目标定位误差的影响进行了定量研究,并得出了相关结论,为舰艇制导弹药的远程打击提供了目标依据和指标参考,给无人机及惯导器件的安装、生产也起到了一定的借鉴意义。
2 无人机姿态对测量目标点位置误差影响的数学模型
2.1 相关坐标系的定义
1)T系-地理坐标系
地理坐标系OtXtYtZt是指无人机载体在飞行时,为表示当前位置的东向、北向和垂直方向的姿态而固结在载体之上的坐标系。本文所采用的是东北天地理坐标系,该坐标系的原点Ot选在了载体的重心处,其中,OtXt指向东,OtYt指向北、OtZt沿垂直方向指向天。
2)N系-导航坐标系
导航坐标系OnXnYnZn是无人机载体因导航计算机系统工作所需要而选择的作为当行基准的一种坐标系。导航坐标系其实只是一种功能性概念意义上的定义,本文导航坐标系用的与地理坐标系相重合的东北天坐标系。其中,原点On选在无人机载体的重心,OnXn指向东、OnYn指向北、OnZn根据右手法则指向与地表垂直向上的方向。
3)b系-载体坐标系
各传感器因为是固定安装在无人机载体上的,故存在一个坐标系来表示所测量的信息。载体坐标系ObXbYbZb是与载体固定连接的直角坐标系。其中。原点坐标Ob位于无人机载体重心、ObXb沿载体横轴向右、ObYb沿载体的纵轴向前、ObZb则沿载体的竖轴向上。如图1 所示,依据地理坐标系与载体坐标系所构成的角度关系可知导航计算时用到的无人机载体的姿态及航向[5]。
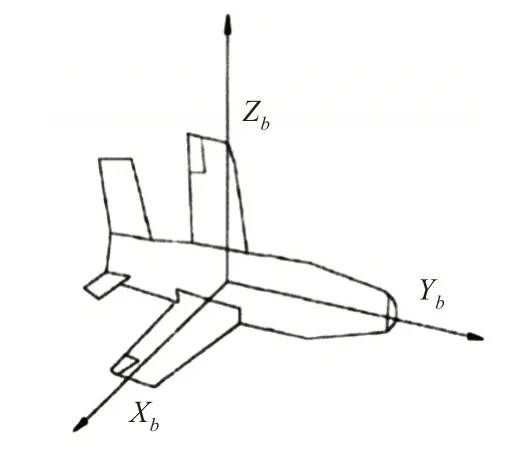
图1 b系-载体坐标系
2.2 姿态角的表示方法
无人机姿态角是通过其导航坐标系各坐标轴与载体坐标系各个轴之间的夹角关系来定义的。其中,从一个坐标系变换到另一个坐标系有两种方式,转动和平移。平移不改变坐标系的方向,故对于姿态测量来讲我们只需要研究无人机在空间上的姿态角和飞行航向角(统称姿态角),可用载体坐标系相对地理坐标系的转动关系来表示出来。其中假定载体坐标系与导航坐标系原点处于同一位置(方向不同),那么可以通过3 次不同方向的坐标轴转动使载体坐标系与导航坐标系相重合,每次转动的角度大小称之为欧拉角,即姿态角,如图2 所示。本文中用φ、θ、γ表示无人机的三个姿态角[6]。

图2 姿态角度的表示方法
航向角φ:定义为绕Z 轴转动的角度,是指在空间载体纵轴方向在水平面上的投影与地球子午线之间的夹角,即为载体坐标系Yb轴在地理坐标系中水平面的投影与地理坐标系Yt的夹角。并以地理北向为起点,以顺时针转动方向为正,定义角度范围是(0 ~360°)。定义无人机载体的Yb轴在地理坐标系水平面上的投影和地磁子午线的夹角为磁航向角。用φm来表示。
俯仰角θ:定义为绕X 轴转动的角度,即在空间上是指无人机载体的Yb轴与地理坐标系中水平面之间的夹角,同时也是载体纵轴Yb与其在地理水平面上的投影之间的夹角。以载体抬头向上为正,向下为负,定义范围是(-90°~90°)。
滚转角γ:定义为绕Y 轴转动的角度,是指无人机载体的横轴Xb与地理坐标系水平面之间的夹角,即为载体横轴Xb与其在地理水平面上投影的夹角。该角以载体右边抬起为正,左边抬起为负,定义范围是(-180°~180°)。
转动是有方向的,故按上述定义中用欧拉角转动法表示姿态时,顺序不同的转动φ、θ、γ三个角所得到的姿态方位是不同的。每一次转动过程可以用一个矩阵来表示,称为姿态矩阵[5]。按照上面的方法定义的欧拉角可以确定一个姿态矩阵。
绕X轴转动θ角时,得到:

绕Y轴转动γ角时,得到:

由该式可以看出,如果一个向量在地理坐标系中表示为Rn,则在地理坐标系中表示Rb可为
3 目标点位置误差的表示方法
3.1 姿态角度的误差研究
无人机航向姿态测量系统采用了多种传感器件,计算和算法过程较多,故不可避免地存在各种误差,其中按照引起误差的原因分类,可以大体分两类:特有误差和固有误差[7]。固有误差指的是传感器或测试系统在设计、装配及生产过程中就所固有的误差,它的产生是不因工作环境、工作地点的改变而改变。特有误差则是指与当前工作状态、工作环境相关,由于特定的运动形式或状态所导致测量结果的误差。
固定误差是在实际应用中,因航向姿态测量系统在开始工作之前,传入导航计算机的数据参数存在一定误差,并由于惯性测量系统各组成部分存在缺陷,加之计算方法不同,因而航姿系统的工作精度受到影响,主要包括有惯性敏感器件的误差、计算机的算法误差、初始对准误差等,这其中惯性敏感器件的误差因出厂时便固有,且不同个体误差不同,难以控制,通常该误差占系统固有误差的80%左右[8]。
特有误差是在姿态测量系统实际测算过程中,与载体运动有关系统所特有的误差,大部分误差产生原因涉及捷联惯性系统,与加速度计、陀螺仪在运动状态下的工作性能相关的误差源。由于特有误差占整体误差比重较小,故本文暂不考虑。
由于惯性敏感器件的误差占系统固有误差的80%左右[9],因此本文主要考虑该误差,根据无人机厂家提供的指标估算惯导器件测量精度选择在航向角0~0.2°,俯仰角0~0.1°,滚转角为0~0.1°[10]。
3.2 目标点位置误差的表示方法
为了方便统一,选取载体坐标系来研究目标位置误差,在地理坐标系下实际点设为M0(),该点可由其他传感器测量获得,为已知,假定不存在测量误差,由于地理坐标系原点选在载体重心O,故目标相对无人机位置=()。
在载体坐标系下设目标实际点坐标为,则有:

当存在姿态误差时,地理坐标系下,目标相对载体位置并未发生变化,仍为=(),但从地理坐标系(即导航坐标系)到载体坐标系的变换矩阵应当考虑角度误差,即:

那么在地理坐标系下,目标定位误差可以用目标实际点与测量点之间的距离来表示,即:

4 仿真分析
假设现有某中小型无人侦察机位于高空对某地面目标实施侦察,假定某时刻该目标及无人机实时位置可由其他传感器准确测量获得(不考虑其他传感器的目标定位误差),经测算,在载体坐标系下,该目标位置相对无人机的坐标为(10,10,-10),单位为km。下面,主要从三个角度及相应误差对目标定位的影响分别进行仿真实验。
4.1 航向角φ 及其误差∆φ 对目标定位精度的影响
分别设俯仰角、滚转角为0°,且暂不考虑两个角度误差的影响,在此情况下对实验进行仿真计算。仿真参数设置如下:航向角Φ变化范围为0~360°,误差∆φ取0~0.2°,以∆φ为X轴、目标定位误差为Y轴(单位:km),得出在随φ、∆φ变化,定位误差的变化范围(如图3),同时任取一固定∆φ值,研究随φ角度变化,对目标定位精度的影响(如图4)。
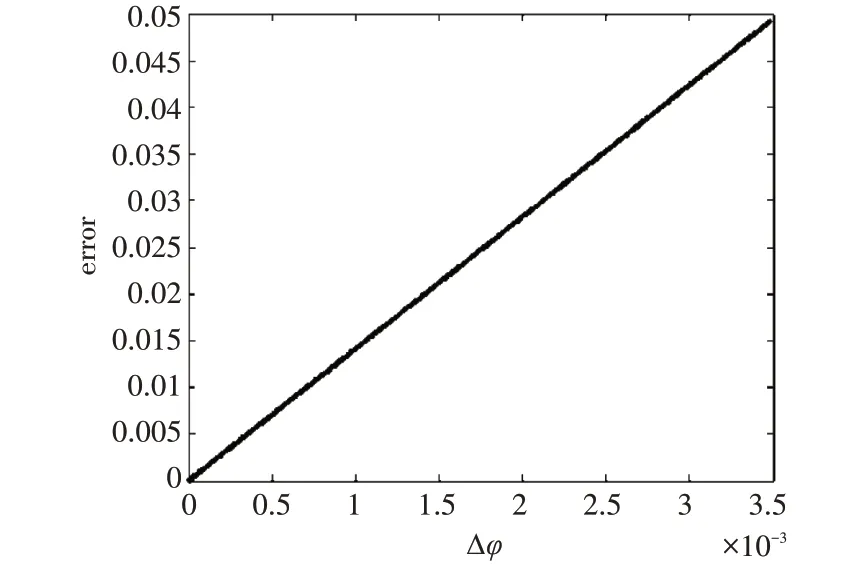
图3 航向角φ 及其误差∆φ 对目标定位精度的影响图
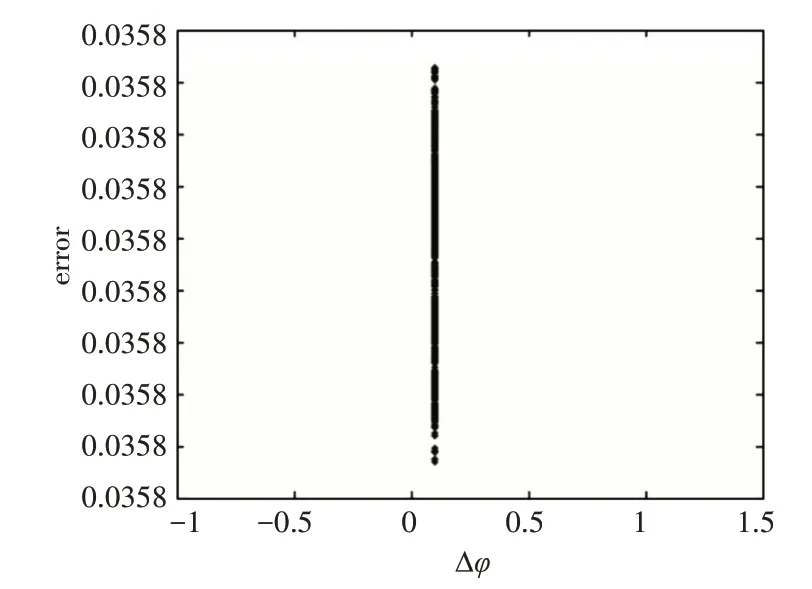
图4 某∆φ 角度下φ 对目标定位精度的影响
4.2 俯仰角θ 及其误差∆θ 对目标定位精度的影响
分别设航向角、滚转角为0°,且暂不考虑两个角度误差的影响,在此情况下对实验进行仿真计算。仿真参数设置如下:俯仰角θ变化范围为-90°~90°,误差∆θ取0~0.1°,以∆θ为X轴、目标定位误差为Y 轴(单位:km),得出在随θ、∆θ变化,定位误差的变化范围(如图5),同时任取一固定∆θ值,研究随θ角度变化,对目标定位精度的影响(如图6)。
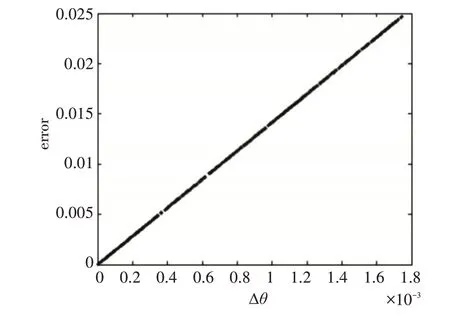
图5 俯仰角θ 及其误差∆θ 对目标定位精度的影响
4.3 滚转角γ 及其误差∆γ 对目标定位精度的影响
分别设航向角、俯仰角为0°,且暂不考虑两个角度误差的影响,在此情况下对实验进行仿真计算。仿真参数设置如下:滚转角γ变化范围为-180°~180°,误差∆γ取0~0.1°,以∆γ为X 轴、目标定位误差为Y轴(单位:km),得出在随γ、∆γ变化,定位误差的变化范围(如图7),同时任取一固定∆γ值,研究随γ角度变化,对目标定位精度的影响(如图8)。

图6 某∆θ 角度下θ 对目标定位精度的影响

图7 滚转角γ 及其误差△γ 对目标定位精度的影响

图8 某∆γ 角度下γ 对目标定位精度的影响
从图3~图8中可以看出,在设另外两个姿态角及其误差为0 的情况下,研究某一姿态角及其误差对目标定位精度的影响时,有以下两个结论:一是在角度误差固定的情况下,某一姿态角的变化对无人机定位误差无影响;二是当角度误差很小的情况下,无人机定位误差与姿态角度误差成线性关系,姿态角度误差越大,无人机定位误差也就越大。
在沿无人机载体航向方向的情况下观测,以目标真实点(10,10,-10)为圆心,若目标位于地面,则无人机的测量散布误差应当为一个椭圆,且X 轴对应航向角误差∆φ对目标定位精度值(单位:m),Y轴为俯仰角误差∆θ对目标定位的精度值(单位:m),为如图9所示;若目标点位于空中,则无人机的测量散布误差应当为一个椭球,其中X、Y轴同地面目标一致,Z 轴为滚转角度误差∆γ对目标定位精度值(单位:m),如图10所示。
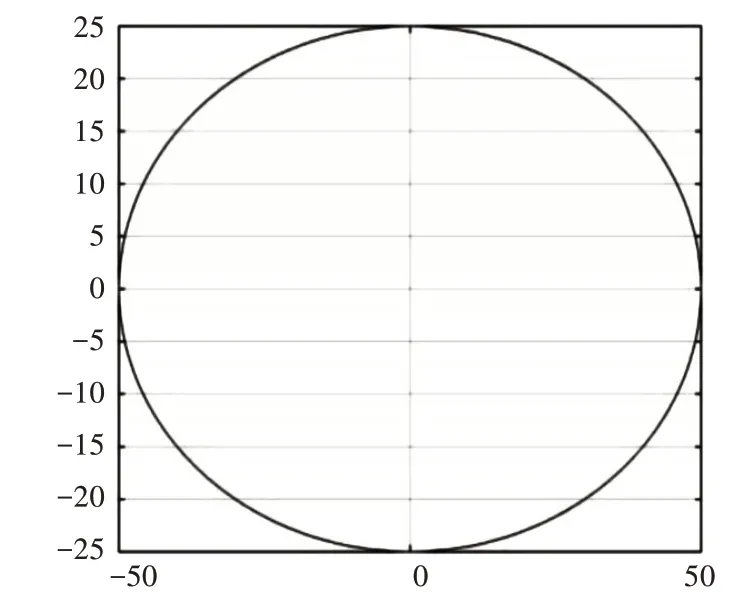
图9 目标点为地面目标时的测量散布误差

图10 目标点为空中目标时的测量散布误差
当前,设某型大口径舰炮圆概率误差CEP(《GJB6289-2008 地地弹道式导弹命中精度评定方法》将CEP 定义为以目标点为圆心,弹着概率为50%的圆域半径[11])为22.17m[12],从上述测量散布误差来看,显然还达不到该型大口径舰炮远程精确打击的要求。
5 结语
为了实现远程大口径舰炮对岸精确打击,充分利用火力资源,研究无人机载体姿态角度误差引起的目标定位精度的情况,本文利用地理坐标系和载体坐标系之间的转换关系,提出并建立了无人机姿态误差与目标定位精度相互关系的数学模型,仿真实验表明,三个姿态角度对目标定位精度无影响,同时在角度误差较小的情况下,定位精度与误差角度大小成正比关系,该中小型无人机定位精度大致在0~50m范围内,据此,舰艇指挥员可根据目标点误差的分布情况及大口径火炮的射弹散布情况,决定毁伤目标所需的弹药数量,确保有效攻击。但就上述情况来看,无人机载体姿态误差对目标定位精度的影响依然较大,毁伤目标所需弹药数量较多,故如何消减误差,进一步提升无人机定位精度,仍是下一步研究的重点方向。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
导航定位学报(2022年2期)2022-04-11
导航定位学报(2022年1期)2022-02-17
语数外学习·高中版中旬(2021年11期)2021-02-14
当代陕西(2019年17期)2019-10-08
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01