
飞行状态对太阳能飞机中组件性能的影响
2020-11-06 06:44金鑫肖文波叶国敏夏情感吴华明章文龙涂继亮何银水
航空学报 2020年10期
金鑫,肖文波,,*,叶国敏,夏情感,吴华明,章文龙,涂继亮,何银水
1.南昌航空大学 无损检测技术教育部重点实验室,南昌 330063 2.南昌航空大学 江西省光电检测技术工程实验室,南昌 330063 3.南昌航空大学 江西省图像处理与模式识别重点实验室,南昌 330063 4.南昌大学 机电工程学院,南昌 330031
太阳能飞机是当前研究的热点,它可以承担许多现在只能由卫星承担的任务,而费用只有卫星的1/10,所以太阳能飞机长时间高驻空是近年来主要的研究方向之一[1-2]。从国内外太阳能飞机的研制来看,可分为有人(瑞士的”阳光脉动” 号)和无人(中国汉能控股集团”UAS EXPO CHINA” 号)驾驶的飞机。性能上有人驾驶的飞机可以实现较长时间的飞行,而无人机飞行时间相对较短[3]。原因除了光伏组件在机翼上安装面积有差别外,还与组件的类型、人对飞行过程中组件发电量有效控制等差别[4-5]。对于制作好的太阳能飞机上的组件发电量,除了与其所受太阳辐射强度和外界温度有关外[6-7],还与太阳高度角等有关[8]。实际上,太阳能飞机飞行速度、高度、时间及区域发生变化时,飞机周围的大气温度、太阳光辐射强度、空气密度等环境因素也随之变化,这些因素耦合在一起共同影响安装在飞机上组件的性能[9-13]。因此若想充分利用组件的发电量实现长时间航行,需要从飞行高度等飞行参数入手研究它们对组件性能的影响。现有研究发现当飞行高度增加时,大气受污染越少,大气透过率越高且太阳辐射强度越大,有利于组件发电;但同时大气密度会减少,无人机需要组件产生更多能量来维持飞行[10]。此外,其他研究发现飞行速度、时间等都会影响组件的发电量,基于不合理假设且没有结合实际气象资料,会得出飞行速度对组件效率的影响不一致结论[14]。
为此,本文从光伏组件产生功率模型出发,结合光伏电池转换效率模型、组件表面温度模型、太阳光辐射模型等,研究了飞行速度、高度、时间及区域等飞行参数影响组件性能的规律;且讨论了飞行参数变化下飞机所需功率与组件产生功率的关系。本研究以单晶硅光伏组件为例,研究结果将有助于太阳能飞机的能量分配,以便实现长时间飞行。
1 光伏组件产生功率模型
太阳能飞机中光伏组件产生的功率Psolar直接与机翼上光伏组件的光电转换效率η、接受的太阳光辐射强度G、飞机上铺设光伏组件的面积S有关,即
Psolar=ηGS
(1)
式(1)模型为光伏组件经典模型且被广泛应用,很多研究通过该模型获得的理论数据与实验数据对比相符合,验证了该模型的准确性[15-18]。式中的η不仅受光伏电池种类影响,且受光伏组件表面温度T影响;而T受飞机工作状态(飞行速度、高度等)影响。G与飞机飞行高度、区域等有关,且G也会对T影响。S对飞机产生总功率有影响,与飞机大小相关;GS实际上就是光伏组件所获取的能量[19]。为了简化飞行参数影响Psolar的规律,电池选用单晶硅电池,对某个型号的飞机上光伏组件面积S采用固定值。对η与G分析如1.1节和1.2节所示。
1.1 影响光电转换效率规律
现有研究表明影响η的因素主要是T,为了更准确研究飞行参数对Psolar的影响规律,先把两类典型的单晶硅光电转换效率模型与实验数据对比,选择其中最准确的模型进行后续的研究。
Wu模型如式(2)所示,称为模型1[20]:
η=[1+(T-25)αη]ηSTC
(2)
式中:αη为温度修正系数,为-0.38%;ηSTC为标准状态(1 000 W/m2,2.5AM,25 ℃)下的转换效率,为0.19。
Skoplaki模型如式(3)所示,称为模型2[21]:
(3)
式中:η0为T0=0 ℃时的转换效率,为0.18;K为修正系数,为0.224。
上述两模型可以看出,当T上升时,η是下降的。为了验证上述模型的精确性,采用Erdem[22]和El-Shaer[23]等研究中的实验数据来分析上述模型。为了有效对比,对实验数据及理论数据进行归一化处理,统一了纵横坐标的数值范围。图1是模型1(虚线)和模型2(实线)与文献数据对比。从图1可以看出,理论与实验的η都是随着T的升高而降低。但模型1与实验数据更吻合,模型2偏差较大。原因在于模型1中,η与T的线性关系比1/4次幂关系更符合温升对硅中电子空穴复合的影响规律。为此后续的研究中,使用模型1。

图1 理论模型与实验数据对比Fig.1 Comparison of theoretical and experimental data
T受太阳光辐射强度等影响[20],考虑太阳辐射强度对光伏组件热交换的影响[24-26],建立组件与周围环境的对流换热关系为
(4)

式(4)中对流换热系数h与飞行速度、空气导热系数等有关,可表示为
(5)
(6)
Nu=
(7)

Tatm=T(b)+l(b)[z-z(b)]
(8)
式中:b代表某一层,T(b)为该层大气中起始点的温度,若飞行高度处于第1层则T(b)=Ta;l(b)为该层的温度变化率;z-z(b)为该点与所在层起始点的高度差。每层大气的起始点为:[0,11 000,20 000,32 000,47 000,51 000,71 000,84 852] m;每层大气的温度变化率l(b)=[-0.006 5,0,0.001 0,0.002 8,0,-0.002 8,-0.002 0,0]。
由上述可知,T估算如下:由气象资料可获得Ta和Tsky;飞行高度z代入式(8)可计算出所在高度对应的Tatm;飞行速度V和Tsky代入式(5)~式(7) 可获得对流换热系数h;最后在已知Tsky、Tatm和h下,由式(4)可计算出在固定飞行参数下的T,将T代入式(2)得到η。
1.2 太阳光辐射强度
G不仅受时间、区域等因素的影响,而且受大气通透率、大气密度等影响,G可表示为[24,28]:
G=G0DzsinA
(9)
式中:G0为大气层外太阳辐射强度,为1 353 W/m2;Dz为大气通透率;A是以太阳能飞机机翼光伏组件为平面的太阳高度角;虽然机翼表面有弧度,导致组件各部位的太阳高度角略有不同,但差异较小可以忽略不计;sinA的计算式为
sinA=cosδcosφcosω+sinδsinφ
(10)

Dz=0.5(e-0.65m(z,A)+e-0.095m(z,A))
(11)
(12)
(13)
p(z)=e5.258 85×ln(288.15-0.006 5z)-18.257 3
(14)
G估算如下:首先将飞行日期差值dn和飞行时间t分别代入赤纬角δ和太阳时角ω公式,得到δ和ω;其次,将δ、ω和飞机所在区域纬度φ代入式(10),即可计算出太阳时角的正弦sinA;然后,由飞行高度代入式(11)~式(14)可计算出大气通透率Dz;已知sinA和Dz,根据式(9)可获得固定时间、固定区域、固定飞行高度下太阳能飞机所能接受到的太阳辐射强度G。
2 飞机在不同飞行参数下所需的功率
太阳能飞机在正常的工作时,为了保证消耗最小的功率,除了改变飞行高度时需要改变飞行姿态,大部分时间为平飞。当太阳能飞行在不同速度等下,其所需的平飞功率是不同的,计算方法为[30]
(15)
式中:Pp为太阳能飞机所需的平飞功率;S为面积;CD0为零升力阻力系数;W为飞机的重力;k为比例常数,计算方法如下[30-31]所示:
(16)
u=1.78(1-0.045AR0.68)-0.64
(17)
(18)
式中:AR为展弦比;u为奥斯瓦尔德效率因子。以Xihe型太阳能飞机为例[31],展弦比为7;机翼上光伏组件的面积S为4.91 m2;CD0为0.007 58;升力系数CL为0.580 5。
飞机在平飞时,升力(L)等于重力(W);Pp仅为太阳能飞机平飞所需的功率,在实际的飞行中,由于电动机和螺旋桨的效率是一定的,实际飞机的功率需求更大;飞机实际飞行中所需的功率Prequire计算如下[30]:
Prequire=Pp/ηmηp
(19)
式中:ηm为电机的工作效率,为0.8;ηp为螺旋桨的工作效率,为0.8。
当太阳能飞机的飞行高度不变时,式(15)中的大气密度受飞行高度的影响,其他飞机参数保持不变,改变飞机飞行速度V,可以计算出不同飞行速度时飞机所需的功率。
3 结果与分析
3.1 飞行速度
假设天空晴朗无云,以南昌地区为例,纬度φ为28.11°;飞行时间t为上午10点,日期为9月26日;地表温度Ta为25 ℃;飞行高度z为8 km。标准转换效率ηSTC分别为0.19、0.25、0.30下光伏组件产生的功率及飞机所需功率随飞行速度变化,如图2所示。
从图2可以看出,当飞机飞行速度从0 m/s增加到30 m/s时,任何标准转换效率下光伏组件产生的功率都随之增加。当标准转换效率为0.19时,产生的功率从800 W上升到1 000 W左右;注意到飞行速度小于10 m/s时,速度增加导致组件产生功率明显增加,而当速度到达10 m/s之后,组件产生功率逐渐平稳,有饱和的趋势。出现这种结果的原因,在于飞行速度的增加,导致雷诺数增加,以至于式(5)中的对流换热系数提升;从而增加了光伏组件的对流换热,在其他参数不变时,组件表面温度下降,性能提升;但性能提升是有限的。原因不仅在于电池性能不能无限增加,也是因为飞机速度快了之后,空气与电池的摩擦也会生热,从而达到平衡后趋于饱和。
又从图2可知,飞机所需的功率随着速度增加而大幅度的增加,飞机速度从0 m/s上升30 m/s时,所需功率增加了3 000 W。原因在于,飞机飞行速度增加后,为克服空气阻力和自身的重力,所需的功率会呈指数增长;由此可见,飞机若想实现长航时的飞机,高速的飞行并不合适,需要选择合适的飞行速度。

图2 标准转换效率分别为0.19、0.25、0.30下光伏组件产生的功率和飞机所需功率随飞行速度的变化Fig.2 Power generated by photovoltaic modules at conversion efficiency of 0.19,0.25 and 0.30,and that required by aircraft with changes in flight speed
此外,标准转换效率也会影响光伏组件产生的功率,标准转换效率越大,产生的功率也越大。注意到,当ηSTC=0.19时,光伏组件产生的功率和飞机所需的功率有能量平衡点,大约在飞行速度等于24 m/s时。说明此速度下,组件产生的功率正好满足飞机的需求。飞机的光伏组件的功率全部被飞行所消耗,不能再为其他工作提供能量。
所以在正常的工作中,飞机的速度应控制在24 m/s 以下,组件在满足飞行需求后还有剩余的能量对蓄电池进行充电,从而满足飞机在夜间飞行的需求[32]。若增大ηSTC,能量平衡点后移,说明更高效率的电池更有利于飞机的飞行,从而有更多的飞行速度可供飞机选择。所以提高电池效率是太阳能飞机的未来研究方向之一。
3.2 飞行高度
除了飞行高度z参数,ηSTC=0.19及V=15 m/s,其他参数与3.1节中相同。太阳能飞机在0 m~12 km的飞行高度范围内,4种巡航速度下光伏组件产生的功率如图3所示。
从图3来看,当飞机飞行高度增加时,4种巡航速度下光伏组件产生的功率也随之增加;当飞行高度达到11 km时,组件产生的功率出现饱和的趋势。飞行高度z的改变主要影响式(8)Tatm、式(9)G、式(11)Dz以及式(14)p(z)和ρ(z)。根据式(4)可知Tatm的变化同样会影响光伏组件的表面温度T,所以z对组件性能的影响从表面温度和所受太阳辐射2个方面体现。结合飞机实际工作环境来看,当飞行高度上升,大气温度随之下降,组件和大气发生热交换导致了组件表面温度下降;同时海拔越高,大气密度和大气通透率越大,太阳辐射越大,从而提升了组件产生的功率。而组件产生的功率出现饱和趋势的原因有2点:一方面是由于组件本身性能的限制,已达到极值,和3.1节结论相同;另一方面,根据美国标准大气手册和国内实测大气温度数据可知,在11~12 km附近,大气温度相对稳定[10,33],同时大气密度也在下降,导致光伏组件散热下降,性能提升较小。

图3 四种巡航速度下光伏组件产生的功率随飞行高度变化Fig.3 Power generated by photovoltaic modules at four flight speeds with changes in flight altitude
又从图3可知,巡航速度对不同飞行高度下光伏组件产生的功率有影响;在低海拔时,巡航速度对功率几乎没有影响;而在高海拔时,随着巡航速度增加功率增加且增速趋于放缓。原因在于飞机在较低的飞行高度时,飞行速度对η影响有限。此外,增速放缓的原因如正如上述,飞行速度增加导致的组件温度降低是有限的。
3.3 飞行时间
除了飞行时间t参数,ηSTC=0.19及V=15 m/s,春分、夏至、秋分和冬至地表温度Ta分别为15、32、28和10 ℃,其他参数与3.1节中相同。春分、夏至、秋分和冬至中光伏组件一天产生的功率,如图4所示。
图4是根据式(1)计算的春分、夏至、秋分和冬至中光伏组件一天产生功率的变化,即飞行时间为早上6点到下午的18点。从图中首先可以看出,4个节气下组件产生的功率都是逐渐上升,到一个峰值后下降;峰值大约在中午12点左右。不同飞行日期会有不同的地表温度Ta,进而对有效天空温度Tsky影响,从而影响式(4)中组件的对流换热。此外,根据式(9)和式(10)可知,飞行日期对一天内的太阳光辐射强度G也影响。由此看出飞行时间主要影响飞机中光伏组件所受的太阳辐射强度和外界大气温度,中午太阳辐射最强,大气温度也是最高,所以功率大致以12点为最高峰左右近似对称。注意到春分、夏至、秋分和冬至组件产生的功率不同,夏季最高,冬季最低;原因还是在于夏至太阳辐射最强,冬至太阳辐射最小。还注意到春分与秋分组件产生的功率几乎相同,原因在于太阳辐射强度春秋分时十分接近。

图4 春分、夏至、秋分和冬至中光伏组件一天产生的功率Fig.4 Power generated by photovoltaic modules on spring equinox,summer solstice,autumn equinox and winter solstice
图5为在上午8点、10点及12点时一年飞行时间中光伏组件产生的功率。一年中,夏季太阳辐射强度大,大气温度也最高;所以组件产生的功率以夏至日附近为峰值,左右对称。此外,注意到受太阳辐射强度的影响,t=8时产生的功率最小,t=12时最大。以上输出特性主要是由于组件性能主要由所受太阳辐射强度决定[34-35]。

图5 9月26日上午8点、10点及12点时一年飞行时间中光伏组件产生的功率Fig.5 Power generated by photovoltaic modules during one year at 8:00,10:00,and 12:00 on morning of September 26
3.4 飞行区域
除了飞行区域的纬度φ参数,ηSTC=0.19及V=15 m/s,其他参数与3.1节中相同,在此条件下,得到的飞行区域纬度变化时光伏组件产生功率的变化如图6所示。
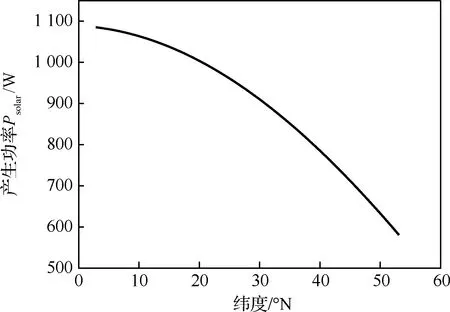
图6 飞行区域的纬度变化时光伏组件产生的功率Fig.6 Power generated by photovoltaic modules with latitude change
图6是以中国的纬度范围3.51°N~53.33°N作为研究区间,光伏组件产生的功率。可以看出,随着纬度的增加,越向北,飞机光伏组件的产生功率越小。由式(10)中飞机所处区域的纬度φ变化,将影响式(9)中的太阳光辐射强度G,进而导致式(1)中组件产生功率变化。所以当纬度越高,太阳高度角越小,光伏组件所能接受到的太阳辐射也就越小,从而导致组件性能的下降[36]。
图7是北京、上海、南昌和广州4个城市组件一年内产生的功率,4个城市中心的纬度分别为39.56°N、31.14°N、28.11°N和23.20°N,纬度依次降低。从图中首先可以看出北京地区飞机光伏组件产生功率最小,而在广州组件功率最强。此外,看出4个地区一年中功率变化幅度分别为63.74%、50.40%、45.72%和38.20%,年平均产生功率分别为774.11 W、871.92 W、902.10 W和944.99 W。结合图6结论得出纬度越低,组件产生的功率变化越小,总产生功率相对较大;纬度越高结论则相反。由此,纬度越低越有利于太阳能飞机的飞行。从图4~图7结论看出,光伏组件性能主要受太阳光辐射强度G影响。

图7 北京、上海、南昌和广州4个城市组件一年内产生的功率Fig.7 Power generated by photovoltaic modules at Beijing,Shanghai,Nanchang and Guangzhou in one year
4 结 论
本文基于光伏组件产生功率模型,研究了太阳能飞机中飞行速度、高度、时间及区域等影响组件性能的规律,结论如下:
1) 当飞机飞行速度增加时,组件产生的功率随之增加但趋于饱和。原因在于速度增加能有效地降低组件的表面温度,但性能提升是有限的。飞机所需的功率随着速度增加而呈现指数增加。组件产生的功率与飞机所需的功率有能量平衡点。若增大电池效率,能量平衡点后移,从而有更多的飞行速度可供选择。
2) 飞机在0~12 km的高度范围内,组件的功率随着飞行高度的增加而增加,但有饱和的趋势。原因在于,当飞行高度上升,大气温度随之下降,组件表面温度下降;同时海拔越高,大气密度和大气通透率越大,太阳辐射强度越大,从而提升了组件产生的功率。而组件产生的功率出现饱和的原因有两点,一方面是由于组件本身性能的限制,已达到极值;另一方面,根据海拔与大气温度的关系,在11~12 km附近,大气温度相对稳定。
3) 飞行时间对于飞机光伏组件性能的影响十分明显。一天之中,组件产生的功率基本以太阳时12点为轴左右近似对称,中午最强;一年中夏季组件性能最强,冬季最弱。原因在于组件性能主要由所受太阳辐射强度决定。
4) 随着纬度的增加,组件产生的功率越小。原因在于,当纬度越高,太阳高度角越小,光伏组件所能接受到的太阳辐射强度也就越小。此外,通过北京、上海等4个地区组件一年内产生的功率对比,可知纬度越低,组件总产生功率也越高,一年中组件性能越平稳;在高纬度地区,一年中组件的性能波动大,总产生功率小。由此,纬度低的地区更适合太阳能飞机的飞行。
猜你喜欢
红领巾·探索(2022年3期)2022-03-14
商用汽车(2021年4期)2021-10-13
计算机与网络(2021年8期)2021-06-20
发明与创新·中学生(2021年4期)2021-04-20
舰船科学技术(2021年12期)2021-03-29
热带作物学报(2021年1期)2021-02-22
科技信息·中旬刊(2018年9期)2018-10-21
少儿科学周刊·少年版(2017年7期)2017-09-29
航空模型(2016年10期)2017-05-09
航空模型(2016年5期)2016-07-25
