与新手浅谈上汽大众车型的自动泊车辅助系统(上)
2020-11-11 10:41陈中泽
汽车与驾驶维修(维修版) 2020年10期
陈中泽

大众车型的自动泊车辅助系统(PLA)是在驻车距离控制PDC的基础上扩展而成的驾驶辅助系统,主要配置在上汽大众的中高端车型上。驾驶员借助系统,可以轻松地将车辆泊入停车位。
一、大众PLA概述
大众最初研发的PLA1.0版本,历经1.5和2.0的版本更新,如今已经升级为3.0版本。PLA1.0和1.5版本的功能仅支持在平行停车位或人行道边沿泊车,对1.0版本而言,要求车位的最小尺寸为车长加1.40 m,1.5版本则为车长加1.10m。在车速≤30 km/h的条件下,测量停车位尺寸的过程在搜寻中持续地进行,即便PLA未接通。
测量停车位尺寸的目的是探寻合适的停车位,获知车辆与停车位的相对位置。搜寻到合适的车位后,系统根据车位长度,一次性或分段式入位驻车。
PLA2.0版本的特点是平行停车、垂直停车、制动支持与驶离平行停车位。
1.探寻停车位测量过程
PLA未激活,车辆以≤20 km/h的速度行驶,在此车速下,系统可以识别出平行车位与垂直车位。如图1所示,车辆驶过垂直停车位A,垂直停车位A被临时存储在控制单元内,在搜寻下一个停车位前,停车位A仍在存储器中。当车辆驶过平行停车位B,垂直停车位A被删除,平行停车位B临时存储在记忆中。驾驶员按下PLA按钮激活功能,停车位B存储在存储器中,并在仪表显示识别到的停车位,若不满足驻车要求,驾驶员被要求继续向前行驶。
(1)系统激活条件
系统激活测量停车位的前提条件如下。
①传感器一直处于工作状态。
②传感器作用范围约4.50m。
③向前行驶寻找平行停车位时车速≤40 km/h。
④向前行驶寻找垂直停车位时车速≤20 km/h。
⑤控制器内临时存储的始终是最后一个测量的停车位。
(2)平行停车位的参数条件
平行停车位的最小尺寸为车长加上前后至少0.40m自由移动的安全距离,理想的初始位置为沿行驶方向与已驻车车辆的侧面距离0.50~2.00 m(图2)。
(3)垂直停车位的参数条件
垂直停车位的最小尺寸为车身宽度加上左右至少0.35 m的自由移动安全距离,搜寻车位时的车速≤20 km/h,理想的初始位置为沿行驶方向并且与驻车车辆的侧面距离为0.50~2.00 m(图3)。
(4)停车位测量的关闭条件
①车速在40~50 km/h(平行停车位),20~50 km/h(垂直停车位),自动泊车转向辅助系统切换至待机模式,并在仪表上显示。
②车速再次低于40 km/h或20 km/h的极限,即使未按下PLA按钮,用于测量停车位的传感器也会被激活,系统切换为停车位测量状态。
③车速超过50 km/h时,传感器完全关闭,系统辫须重新启动。
④车辆停车时间超过30 s,传感器临时关闭,一旦车辆起动行驶,传感器将重新激活。
2.驻车模式
车辆行驶一段路程,按钮处于驻车模式。第一次按下PLA按钮,PLA启动,并在仪表显示道路右侧平行停车位信息。第二次按下按钮,显示屏显示道路右侧垂直停车位的信息,若在道路左侧驻车,在按下按钮后,还需开启左侧转向灯开关。第三次按下按钮,系统关闭。
对装备起停装置的车辆而言,PLA接通时,起停功能不起作用。
搜寻到合适的停车位,换入倒挡0.5s后,启动自动驻车。系统主动实施转向干预,不允许驾驶员转动方向盘。在分段式驻车过程中,仪表显示屏向驾驶员提示前进或倒车的要求。驻车过程完成时,仪表提示将退出转向辅助。如识别到无法准确确定车辆位置或驾驶员接管方向盘,转向辅助终止。
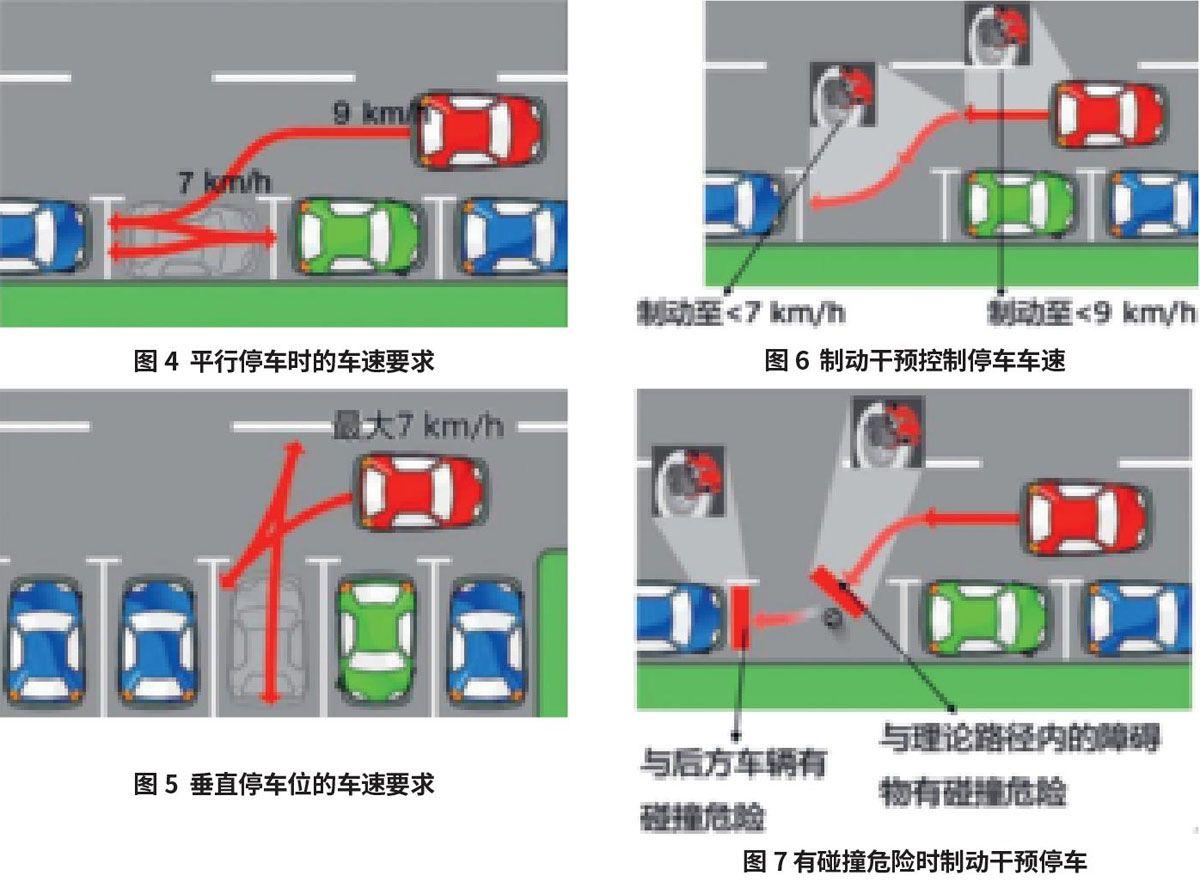
(1)平行车位驻车的车速要求
車辆从初始位置驶向停车位的最大车速为9 km/h,驶入停车位内的最大车速为了km/h(图4)。
PLA2.0可以识别出车辆与物体,知晓人行道边沿及人行道边沿的距离,以人行道边沿约0.15 m作为驻车目标,系统根据已经停好的车辆或物体的位置测量停车位长度与深度。在驻车过程中,PLA始终仿效已经停好的车辆,与之排成一列。
(2)垂直停车位泊车的车速要求
车辆在驶入停车位内的最大车速为了km/h(图5)。PLA2.0系统支持在半径大于20 m的弯道内驻车,弯道半径用来计算理论路径和车辆的最终位置。
(3)制动干预
PLA识别到车辆超过驻车目标车速时,要求ABS/ESP启动制动干预以控制车速。驻车车速的控制目标值,直线行驶阶段的车速为9 km/h,驶入停车位的车速为了km/h(图6)。在与识别到的障碍物存在碰撞可能时,ABS/ESP进行制动直至完全停车(图了)。当车速>10 km/h时,PLA功能终止。
3.自动驶离模式
第一次按下PLA按钮,转向辅助指示灯亮起,提示自动驶离模式激活。开启转向灯,转向灯信号表示向哪个方向驶离停车位。挂入倒挡,自动驶离过程启动,仪表出现相应的文本显示。PLA根据识别到的转向灯开关方位,沿该侧方向驶离停车位。再次按下按钮,PLA被关闭。驶离模式只需用到PDC传感器。
驶离车速超过了km/h,ESP也会在驶离过程中进行制动干预,识别到存在碰撞危险时制动直至停车。
4.仪表显示内容描述
在泊车期间,仪表将出现多个提示。
①停车位搜索时,未识别到车位或停车位空间尺寸不充分,驾驶员被要求继续行驶。
②泊车转向辅助系统准备就绪,仪表出现平行停车或垂直停车的图形。换入R挡后约0.50s,PLA启动。
③转向辅助已激活,PLA检测到有危险,仪表显示的内容是“转向干预激活,注意周围环境”,提醒驾驶员注意,以便随时终止或手动结束驻车过程。
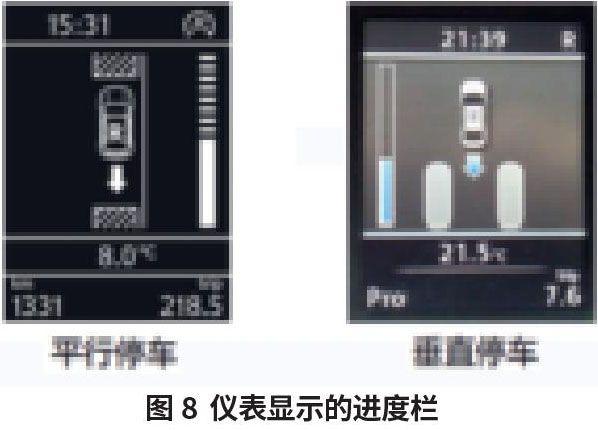
④倒车行驶要求,转向辅助系统通过换入R挡接管车辆转向,沿计算出的理论路径驶入停车位,仪表出现的进度栏会显示与停车位后端还有多少距离(图8)。
⑤前进行驶要求,系统发出持续音或进度栏为空白,将显示制动器图标,要求驾驶员制动、换挡以变更行驶方向。
⑥泊车过程结束,仪表显示“自动泊车已取消,请接管方向盘”的文本,并发出一个声音信号。
二、PLA系统组成和控制策略
PLA系统由自动泊车辅助系统控制单元J791、相关的驻车距离监控的PDC传感器和转向辅助PLA传感器、转向辅助按钮E581、驻车辅助按钮E266、转向辅助指示灯K241、驻车辅助指示灯K136及距离报警蜂鸣器H15和H22组成。参与工作的控制单元有仪表控制单元、发动机控制单元、自动变速器控制单元、防抱死制动控制系统控制单元(或电子稳定系统控制单元)、机械电子转向器、车身控制单元BCM、转向柱电子控制单元及网关等,另外还有收音机或导航、转向角传感器等参与(图9)。PLA2.0系统控制框图如图lO所示。
机械电子转向控制单元J500是自动泊车控制的重要前提条件。自动泊车功能启用后,内置在J500的机电驱动装置V187主动实施自动转向功能。若转向力矩传感器G269识别到驾驶员的转向干预,则立刻终止自动泊车过程。
ABS/ESP控制单元J104的主要任务是向PLA系统提供车速信号,参与制动干预。制动干预的目的之一,是将驻车车速控制在7km/h或9km/h以下。当识别到有碰撞危险时,J104施加制动直至停车,并关闭PLA。左右后轮轮速传感器G44与G46可以识别车辆的移动,确认前进或后退的行驶方向,PLA通过它们计算和获取路线信息。
自动变速器控制单元J217识别换挡杆位置与换入的挡位,发动机控制单元J623负责暂时关闭起停装置,使发动机在泊车过程中不被关停。
车身腔制单元J519提供车门开关信息,向PLA发送倒挡信号,是激活系统的前提条件之一。一旦识别到车门开启,PLA终止。
超声波传播速度取決于空气密度,空气密度则与环境温度有关,由此可知,温度会对计算与所测障碍物的距离产生—定影响。环境温度由车外温度传感器G17传输到仪表,供系统修正计算的驻车距离。
仪表向驾驶员显示PLA行驶方向和制动等泊车要求、泊车进程的相关图形及提示文本,并发出信号音。
转向灯开关E2的信号表达了驾驶员想在道路左侧或右侧的泊车意愿。左置方向盘的车型,系统默认在道路右侧泊车,欲在道路左侧泊车,需开启左转向灯;右置方向盘的车型,系统默认在道路左侧泊车,想在道路右侧泊车,需开启右转向灯,同时仪表会显示相应的图形。传输E2信号的任务由转向柱电子控制单元J527完成。转向角传感器G85负责识别方向盘的转角。
收音机或导航系统在驻车过程中,通过PLA显示驻车距离监控或后部摄像机获取到的障碍物图像,在PLA激活时,对音频播放的音量控制设码。
J791主要掌控车辆泊入或驶离车位的过程,以及控制驻车距离,协调来自可视泊车辅助系统和倒车摄像机的图像,在收音机或导航系统显示屏中显示内容。
(待续)
猜你喜欢
装备维修技术(2020年5期)2020-11-20
汽车与驾驶维修(维修版)(2020年7期)2020-08-14
汽车实用技术(2020年8期)2020-07-09
大众汽车·学术版(2019年1期)2019-10-20
小猕猴智力画刊(2019年8期)2019-09-12
汽车观察(2019年11期)2019-02-02
汽车杂志(2018年6期)2018-06-25
法制与社会(2017年25期)2017-09-14
作文周刊·小学一年级版(2017年27期)2017-08-10
计算机辅助工程(2016年3期)2016-08-01