
基于MATLAB的捷联惯组测量数据分析平台
2020-11-16 06:56陈春歌宋玉珍
数字技术与应用 2020年9期
关键词:飞行器
陈春歌 宋玉珍

摘要:针对某型飞行器的运动轨迹参数的计算问题,建立了基于MATLAB的捷联惯组测量数据分析平台。该平台采用MATLAB GUI图形化编程语言编制,功能设计兼具模块化和结构化,通过设定初始参数生成飞行器运动轨迹。利用仿真试验数据结果表明,该平台实现了捷联惯组数据在发射坐标下的解算,可用于某飞行器试验数据事后处理和运动轨迹复现工作。
关键词:飞行器;捷联惯组;运动轨迹;MATLAB GUI
中图分类号:TP273 文献标识码:A 文章编号:1007-9416(2020)09-0161-04
0 引言
某飞行器惯性测量装置用于测量飞行器相对惯性空间转动的角速度和视加速度在载体坐标系三个轴上的投影[1]。然而在实际应用中,由于测量所得角速率和加速度为载体坐标下数据,在事后数据处理中需将其转换到发射坐标系下进行分析,以复现出发射坐标下的弹道数据,并需要将数据进行存储再利用。
MATLAB GUI是基于MATLAB的图形化编程语言,基于MATLAB GUI的编程既能有效利用MATLAB的计算功能,又能通过GUI直观显示计算结果及曲线等,能更直观地分析飞行器飞行弹道特征及捷联惯组性能。本文捷联惯组测量数据分析平台各部分功能相互独立,初始参数、原始测量数据读取部分根据飞行器的运动特征和初始环境,设定初始参数选取原则,并在弹道复现计算中进行了初始误差补偿;导航数据解算部分是分析平台的核心部分,对飞行器的姿态矩阵更新选取了两种算法:欧拉角法和四元数法,实现了两种算法下姿态解算的精度比较;该平台另一特色即是结合飞行器飞行弹道特征点,选取主要特征点进行解算分析。通过设置不同初始参数,复现不同初始条件下各时刻载体的运动信息、姿态信息及弹道特征点信息,解算结果明确,便于工程技术人员进行事后数据分析。
1 捷联惯组测量数据分析建模
1.1 选取坐标系
捷联惯性测量装置固连于飞行器载体上,测量到的是载体坐标系轴向上的分量,飞行器运动轨迹的观测点在发射坐标系,初始运动参数的设置建立在艇体坐标系[1]。坐标系定义如下:
(1)发射坐标系(e系)。发射坐标系原点取在给定的发射时刻惯性测量组合中心,轴在过点的地球椭球面的切平面内,并指向发射方向,轴是过原点的(关于地球椭球面的)法线方向,轴与以上两轴构成右手直角坐标系。
(2)载体坐标系(b系)。载体坐标系原点位于飞行器载体质心,轴与飞行器主对称轴重合,指向飞行器头部;轴与轴垂直,发射时指向发射坐标系轴的反向;轴与前两轴构成右手直角坐标系。
(3)艇体坐标系(s系)。艇体坐标系原点位于艇体质心,轴指向艇艏,轴在艇纵对称平面内垂直轴指向上,轴与、两轴构成右手直角坐标系。
1.2 姿态矩阵更新算法
飞行器的位置信息和姿态信息是载体坐标系相对于发射坐标系的方位关系[2]。在刚体定点转动理论中,描述动坐标系相对参考坐标系的方位关系的方法有多种,其中欧拉角法和四元数法是应用最广的两种姿态矩阵计算方法。
(1)欧拉角法。一个动坐标系相对参考坐标系的方位,可以由动坐标系依次绕三个不同的轴转动的三个转角来确定[2]。载体相对发射坐标系的飞行姿态可由三个欧拉角确定,分别为俯仰角φ、偏航角ψ、滚动角γ。根据姿态角的转动顺序,可得载体坐标系到发射坐标系转换矩阵为:
2 初始参数设置
初始参数包括发射坐标系下飞行器的初始速度、初始位移和初始姿态,飞行器装载于艇体上,艇体的航行速度构成了载体的初始运动速度。艇体的摇摆运动可分解为绕艇体横轴的纵摇运动、绕艇体纵轴方向的横摇运动和绕艇体垂向轴的偏航运动,它会影响到载体的初始姿态。设A为发射时刻航向角,VE、VN为载体北向、东向速度,天向速度为0,纵摇角为Z,横摇角为H,则根据载体与飞行器位置关系,可得初始时刻飞行器初始速度方程为:
4 功能实现与结果分析
4.1 仿真初始条件
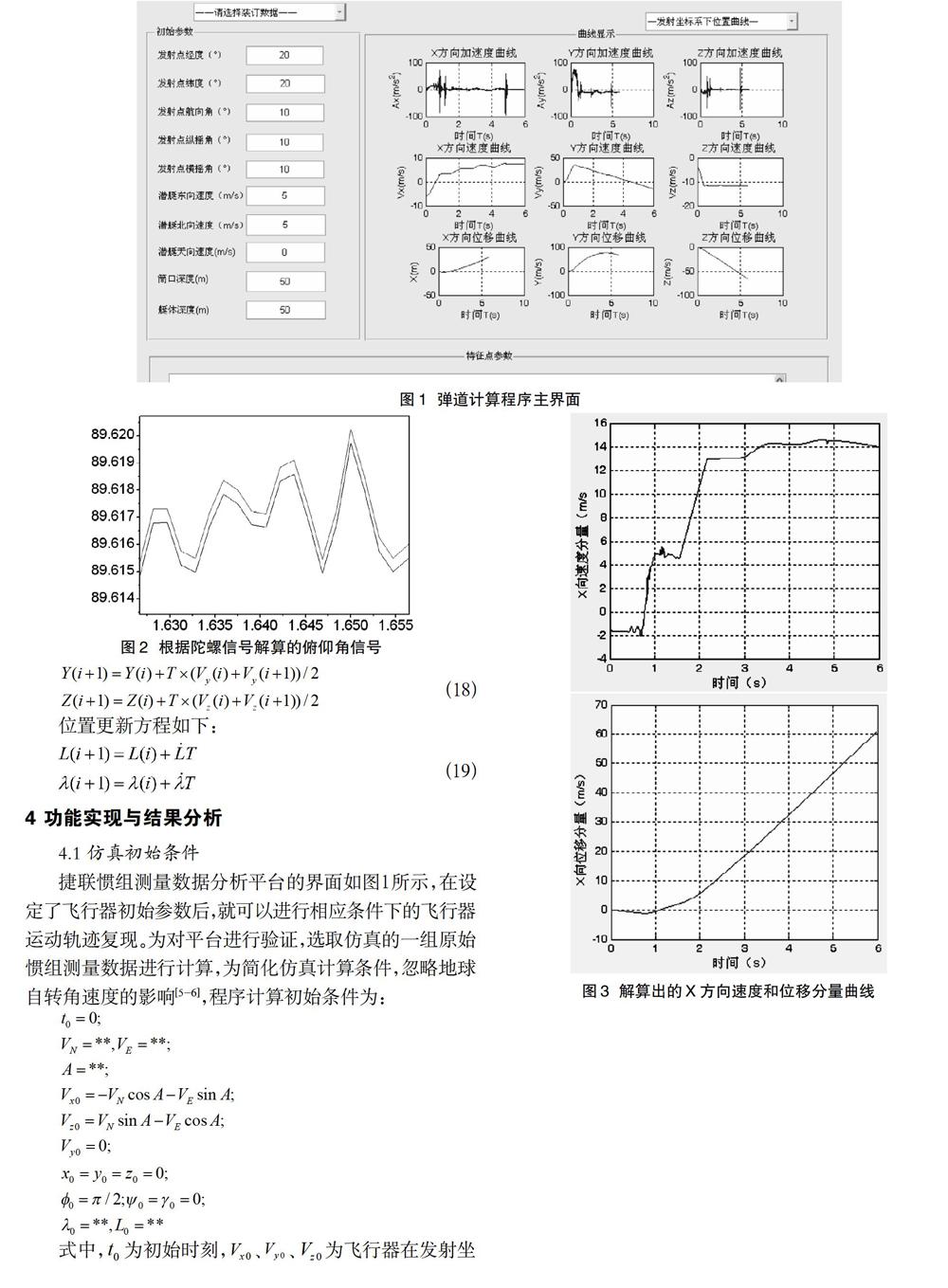
捷联惯组测量数据分析平台的界面如图1所示,在设定了飞行器初始参数后,就可以进行相应条件下的飞行器运动轨迹复现。为对平台进行验证,选取仿真的一组原始惯组测量数据进行计算,为简化仿真计算条件,忽略地球自转角速度的影响[5-6],程序计算初始条件为:
式中,为初始时刻,、、为飞行器在发射坐标系下初始速度分量,、、为飞行器在发射坐标系下初始位移分量,、、分别为飞行器初始姿态角。
4.2 分析平台计算结果与分析
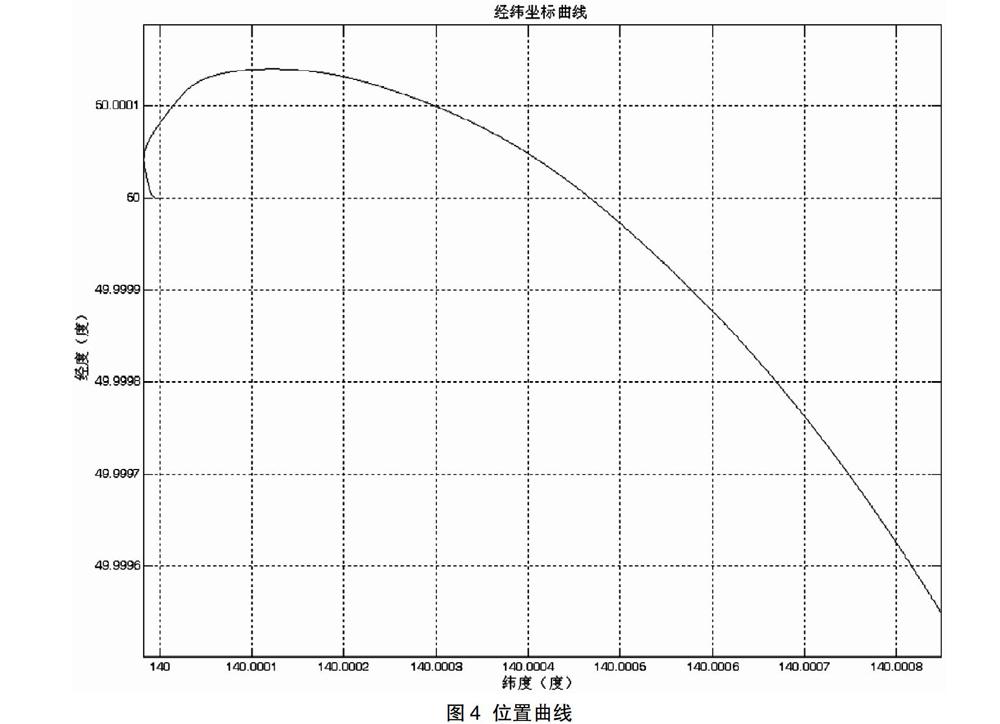
利用两种姿态矩阵更新算法欧拉角法和四元数法分别进行了导航解算,图2是由陀螺信号仿真解算出的俯仰角曲线,用欧拉角和四元数法计算得到的俯仰角和滚动角几乎相同,姿态角偏差值在10-4数量级,说明在偏航角不为零时,两者是等价的。姿态曲线也较为准确描述了发射坐标系下飞行器姿态变化趋势。图4是由加速度信号仿真解算出的速度、位移曲线,图3为仿真解算出的位置曲线,都较为准确表现了飞行器运动轨迹特征。
5 结论
本文建立了基于MATLAB的某飞行器捷联慣组测量数据分析平台,能利用两种姿态矩阵更新算法分别进行计算,并对计算结果进行了比较。计算结果表明两种算法在偏航角变化很小,飞行时间很短的情况下,都可适用于飞行器全姿态变化解算,基于MATLAB GUI的程序界面人机交互性好,输入输出参数明确,所建模型易于修改、扩充,并可根据不同飞行条件作适应性更改,解算结果直观,适用于飞行器试验数据事后处理、运动轨迹恢复工作。
参考文献
[1] 范奎武,刘竹生.水下弹射模型弹弹道复现算法[J].导弹与航天运载技术,2007(1):102-103.
[2] 秦永元.惯性导航[M].北京:科学出版社,2006.
[3] 王立波.捷联惯导系统设计与数据处理技术研究[D].西安:西安电子科技大学,2011.
[4] 吴春新.捷联惯导系统姿态算法及误差自动补偿的研究[D].哈尔滨:哈尔滨工业大学,2010.
[5] 陈世年.控制系统设计[M].北京:宇航出版社,1996.
[6] 赵鸿,赵忠,龙国庆.捷联惯性导航系统飞行轨迹数据生成与惯性器件建模[J].系统仿真学报,2005(5):1027-1028.
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
电子制作(2018年2期)2018-04-18
小朋友·快乐手工(2015年5期)2015-06-06
