高超声速飞行器有限时间耦合模糊控制
2020-12-01 07:13郭建国鲁宁波周军
航空学报 2020年11期
郭建国,鲁宁波,周军
西北工业大学 精确制导与控制研究所,西安 710072
高超声速飞行器由于有诸多优点,备受世界各国重视,同时也具有诸多的研究难点,其中之一是飞行控制系统的设计,原因在于其飞行环境复杂,以及数学模型存在非线性、强耦合、快时变、强不确定性等特点[1-2]。
对于高超声速飞行器而言,为了实现大范围机动通常采用倾侧转弯的控制策略,在这一过程中,由于弹体的快速滚转会使得俯仰和偏航通道出现强烈的耦合,同时,角速度子系统和角度子系统也会产生强烈的耦合,这些耦合很容易造成高超声速飞行器不稳定而导致任务失败。
另外,由于高超声速飞行器的飞行空域特殊性以及舵的控制能力有限给高超声速飞行器的飞行控制带来了巨大的挑战。
目前对耦合的处理有2种方法:解耦和不解耦。解耦最常用的方法是动态逆[3],其思想是首先对非线性耦合特性进行准确建模,之后采用动态逆的方法设计控制器使得模型解耦,解耦后的模型采用变结构控制[4-10]、μ综合[11-12]、H∞控制[12]等方法设计控制器。
解耦方法的局限性有两点:首先,高超声速飞行器的飞行环境复杂,高度变化范围大,这导致气动参数出现大范围变化,同时存在诸多不确定因素,例如:风干扰等,以及无法建模的动态过程造成其数学模型与实际情况有一定的差距,无法得到精确的数学模型,另外,加之耦合具有快时变性。在这种情况下采用解耦的控制器设计方法,会使得高超声速飞行器的控制性能受到很大影响。其次,由于耦合是快时变的,因此,无法实现实时解耦。
不解耦方法的核心思想是在控制器的设计中充分考虑耦合的影响,通过适当的方法进行补偿。首先,将耦合系统表示成的关联大系统形式,利用关联大系统的Lyapunov稳定理论及其Riccati方程设计滑动模态及变结构控制[13],该方法对于处理系统的耦合具有很好的效果,但是缺点是对舵的控制要求较高,要求控制器具有很强的控制能力。其次,为了兼顾控制性能和控制器的控制能力,控制领域专家们开始注重于研究耦合评价问题[14-16],早在1966年,就有学者开始研究多变量系统耦合测量问题[17]。首先在频域范围内进行耦合分析[18-20],如印度学者Gigi和Tangirala[17]对耦合进行了分析评价,并将其应用到控制器设计,该方法对于耦合的处理提出了一种新的思想,但是其局限性在于仅在频域范围内对耦合进行评价,缺少时域的分析评价,对于时域范围内的控制器设计缺乏指导。
为了解决时域控制器设计问题,提出了基于Lyapunov稳定性理论的耦合评价方法,来设计控制器[21-22]。这一理论对于时域的控制器设计具有重要的指导意义,但是,还存在如下问题:
1) 基于耦合评价指标切换引起的控制输入抖振问题。
2) 系统对耦合效应的自适应问题。
3) 伺服系统的动态特性问题。
针对以上前问题,采用模糊控制的方法,将耦合对系统的影响连续化处理,既解决了控制输入引起抖振问题,又能保证系统对耦合特性的自适应性。另外,考虑到工程实际中舵系统的效应,因此这里将舵系统引入到控制模型中。
1 问题分析及描述
1.1 高超声速飞行器数学模型
高超声速飞行器动力学模型为[22]
(1)

气动力和力矩表达式为
(2)
式中:q=0.5ρV2为动压,ρ为大气密度;S、L为飞行器的特征面积和特征长度;CY、CZ为气动系数;mx、my和mz为气动力矩系数,实际飞行过程中,通过气动插值得到。
气动力系数与气动力矩系数关于飞行状态的近似表达式为
(3)
(4)
式中:τ1、τ2和τ3为滚转航系统时间常数。
综合式(1)和式(4),可得控制模型为
(5)

1.2 跟踪问题描述

(6)
式中:x2c、x3c为虚拟控制量;B1e2、B2x1和B3e3为子系统间的耦合项,B1e2为角速度子系统对角度子系统的影响,B2x1、B3e3为角度子系统和舵系统对角速度子系统的影响。
假设1参考指令及其一阶导数光滑、有界并且已知。
2 控制系统设计
高超声速飞行器要求响应具有快速性和对各种不确定性具有强鲁棒性,并对耦合进行“选择性”的补偿[20],在此过程中,采取了模糊控制的思想,使得控制律更为平滑。
实际中,外部干扰难以获取,因此采用了干扰观测器对其估计,并在控制律中进行补偿,干扰观测器具体形式为
(7)
对系统(6)采用基于李雅普诺夫稳定性理论的耦合评价方法,采用终端滑模设计控制律。
引理[5]采用如下滑模面
(8)
式中:a,b,c均为可调参数。当l=2时,当进入滑模面后,从任意有限初始状态x(0)出发的轨迹收敛到原点所需要的时间为
(9)
当|x(0)|>1时,
(10)
当|x(0)|≤1时,
(11)
式中:k为正整数;Θ(·)取最小正值。
选取滑模面为
(12)

(13)

因此,基于这个目的定义评价指标:
式中:J(Θ12)=sgn(s1⊗B1e2),Θ12表征第一通道受第二通道的影响。
采用指数趋近律
(14)
式中:k1、ε1为对角正定矩阵。
考虑e1子系统,得虚拟控制器
(15)

注1实际中,式(15)的导数难以获取,故采用一阶滤波器。
(16)

接下来证明角度子系统在式(15)的作用下是有限时间稳定的。
(17)
(18)
从式(18)中可以看出,如果判断耦合有利于系统稳定,则第1项会被保持,如果不利于系统稳定,则第1项会被抵消,如果判断J(Θ12)=0,则表明系统不存在耦合,故第1项不存在。第2项、第3项以及第4项均为负值,而最后一项,根据Young不等式,有以下不等式成立。
(19)
式中:σb为指令信号变化的边界值,综合以上分析,得到如下不等式:
(20)

(21)
从式(21)可以看出,系统状态能够在有限时间收敛到一个很小的邻域内。其中,σb由一阶滤波器引入,实际上降低了系统的稳定程度。
为了克服切换所引起的抖动,引入模糊系统代替切换[9],同时能保证控制输入的平滑。令Θ1为模糊系统的输入,UF为模糊系统的输出,对UF和Θ1的规则集合作如下定义:
Θ1={NB, NM, Z, PM, PB}
UF={NBU, NMU, ZU, PMU, PBU}
式中: 耦合项Θ1为对系统的影响:NB为强度较大的不利耦合;NM为强度中等的不利耦合;Z为系统不存在耦合;PM为强度中等的有利耦合。PB强度较大的有利耦合。同样,模糊系统的输出UF与之对应为:NU不利影响下的输入,ZU为无影响下的输入,PU是有利影响下的输入,因此,以上的模糊规则总结如下:
Rule1: ifΘ1is NB, thenUFis NBU.
Rule2: ifΘ1is NM, thenUFis NMU.
Rule3: ifΘ1is Z, thenUFis ZU.
Rule4: ifΘ1is PM, thenUFis PMU.
Rule5: ifΘ1is PB, thenUFis PBU.
采用中心平均去模糊化的方法,设计控制律:
x2c=
(22)
式中:w11、w12、w13、w14、w15均为对角阵,取值为[0 1],并且满足:
w11+w12+w13+w14+w15=I
标称虚拟控制量为
(23)

虚拟控制器为
(24)
式(24)即为角度子系统的虚拟控制器。
下面证明系统在式(24)的作用下是稳定的。
证明:选取Lyapunov函数如V1所示,区别起见,记为V′1,对其关于时间求导,可得
(25)
由于,r12是时变的,因此,式(25)做如下处理:
(26)
由于第1项始终为负,所以可得
(27)
因此,在控制律(24)的作用下,角度子系统能够在有限时间内收敛到一个很小的邻域。

tangle≤max{tα,tβ,tγv}
(28)
式中:tα、tβ和tγv为通过引理确定的最大值。
对于角速度子系统,选取滑模面为
(29)
(30)
综上所述,为了保证系统的稳定性,根据评价指标,定义J(Θ21)和J(Θ23)为
式(31a)和式(31b)分别表示第二通道受到第一通道和第三通道的耦合影响,可得虚拟控制器为
(32)
以下证明角速度系统在式(32)作用下是稳定的。

(33)
式中:T1为时间滤波常数。
(34)

(35)
从式(35)可以看出,系统状态能够在有限时间收敛到一个很小的邻域内。其中,σ1同样由一阶滤波器引入,会降低系统的稳定程度。
采用模糊控制方法克服耦合控制中的抖动问题,得到控制器为
(36)

(37)
下面证明角速度系统在式(37)作用下是稳定的。
证明:选取Lyapunov函数如V2所示,区别起见,记为V′2,对其关于时间求导,得
(38)
由于式(38)的前两项始终为负,可得
(39)
因此,在控制律(36)的作用下,角速度子系统能够在有限时间内收敛到一个很小的邻域。
trate≤max{tωz,tωy,tωx}
(40)
式中:tωz、tωy和tωx为通过引理确定的最大值。
下面考虑舵系统的控制器设计。由于舵系统不存在通道间的耦合,所以直接进行控制器设计。选取滑模面为
(41)
采用指数趋近律,得到如下所示的控制器:
(42)
下面证明舵系统是稳定的。

(43)
(44)

(45)
从式(45)可以看出,舵系统状态能够在有限时间收敛到一个很小的邻域内。
tδ≤max{tδz,tδy,tδx}
(46)
式中:tδz、tδy、tδx为通过引理确定的最大值。
由此可得闭环系统收敛的时间为
tclose≤tangle+trate+tδ
(47)
注5为避免滑模控制设计中引入的符号项引起抖动,采用边界层方法进行替换。
下面证明闭环系统的稳定性。
证明:选取Lyapunov函数为
V=V1+V2+V3
(48)
对式(48)关于时间t求导
(49)
根据Young不等式,

(50)

3 仿真分析
高超声速飞行器的模型参数和气动参数可参考文献[21],设置迎角指令为5°的方波信号,倾侧角指令为-5°的方波信号。初始高度为27 km,初始速度为5Ma,下面分别从舵系统、控制方法的有效性以及气动拉偏3个方面对基于耦合的模糊控制(Coupling-based Fuzzy Control, CBFC)与基于耦合控制(Coupling-based Control, CBC)进行对比分析。
控制器参数为
a11=0.1,a12=5,a13=3,b11=1,b12=7,b13=5,k11=0.5,k12=0.5,k13=0.5,ε11=0.5,ε12=0.5,ε13=0.5,a21=0.1,a22=5,a23=3,b21=1,b22=5,b23=5,k21=0.1,k22=0.5,k23=0.5,ε21=5,ε22=0.5,ε23=0.5,a31=0.1,a32=5,a33=3,b31=1,b32=5,b33=5,k31=0.1,k32=0.5,k33=0.5,ε31=0.5,ε32=0.5,ε33=0.5。
观测器参数为
σ01=0.1,σ02=0.1,σ03=0.1,σ11=100,σ12=100,σ13=100。
3.1 引入舵系统仿真
考虑了一阶环节舵系统的特性,时间常数为15 s-1。下面对这两者进行仿真分析。
首先给出了给出了考虑舵系统和不考虑舵系统的情形下采用CBFC控制器的对比情况。图1 为迎角、侧滑角以及倾侧角的对比仿真,图2为与之对应的舵偏曲线。图1 中考虑舵系统的CBFC控制器,从迎角、侧滑角以及倾侧角可以看出响应曲线更加平滑,超调量更小,对于系统要求较低,主要原因是一阶环节的延迟特性引起的。图2中是与之对应的舵偏角曲线,从中可以看出由于考虑了舵系统后,舵偏曲线变化程度有所减弱,舵偏曲线较CBFC控制器的舵偏曲线更加平滑,同样响应的速度有所减缓。
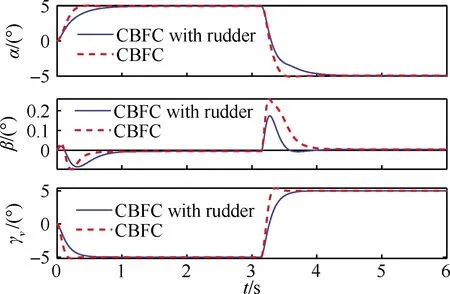
图1 舵效特性下的姿态角曲线Fig.1 Curves of attitude angle under rudder effectiveness
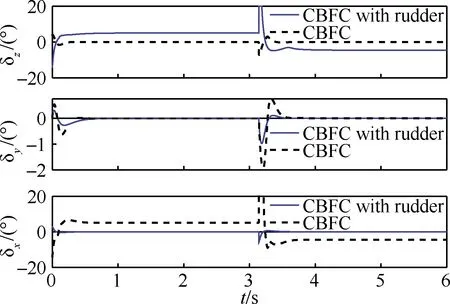
图2 舵效特性下的舵偏角曲线Fig.2 Curves of deflections under rudder effectiveness
总体而言,引入舵系统动态特性后,可以使系统的响应曲线以及舵偏的变化更加平滑,同时减少了超调量,考虑舵系统在仿真过程中更接近实际情况。
3.2 对比仿真
考虑对采用CBFC控制器和CBC的控制器进行对比仿真。图3分别为迎角跟踪指令、倾侧角跟踪指令以及侧滑角稳定控制的仿真对比分析。
图3为高超声速飞行器的迎角、侧滑角以及倾侧角的响应曲线,从图3中的迎角响应曲线中可以看出,在跟踪方波信号时,采用CBFC控制器与CBC控制器相比,更平滑,没有抖振,有效抑制了耦合评价过程中的抖振现象。同样从侧滑角和倾侧角的响应曲线可以看出,抖振明显减小并且具有很快的收敛性,图4为与之对应的舵偏曲线,从图4可以看出,舵偏曲线的抖振现象明显降低。
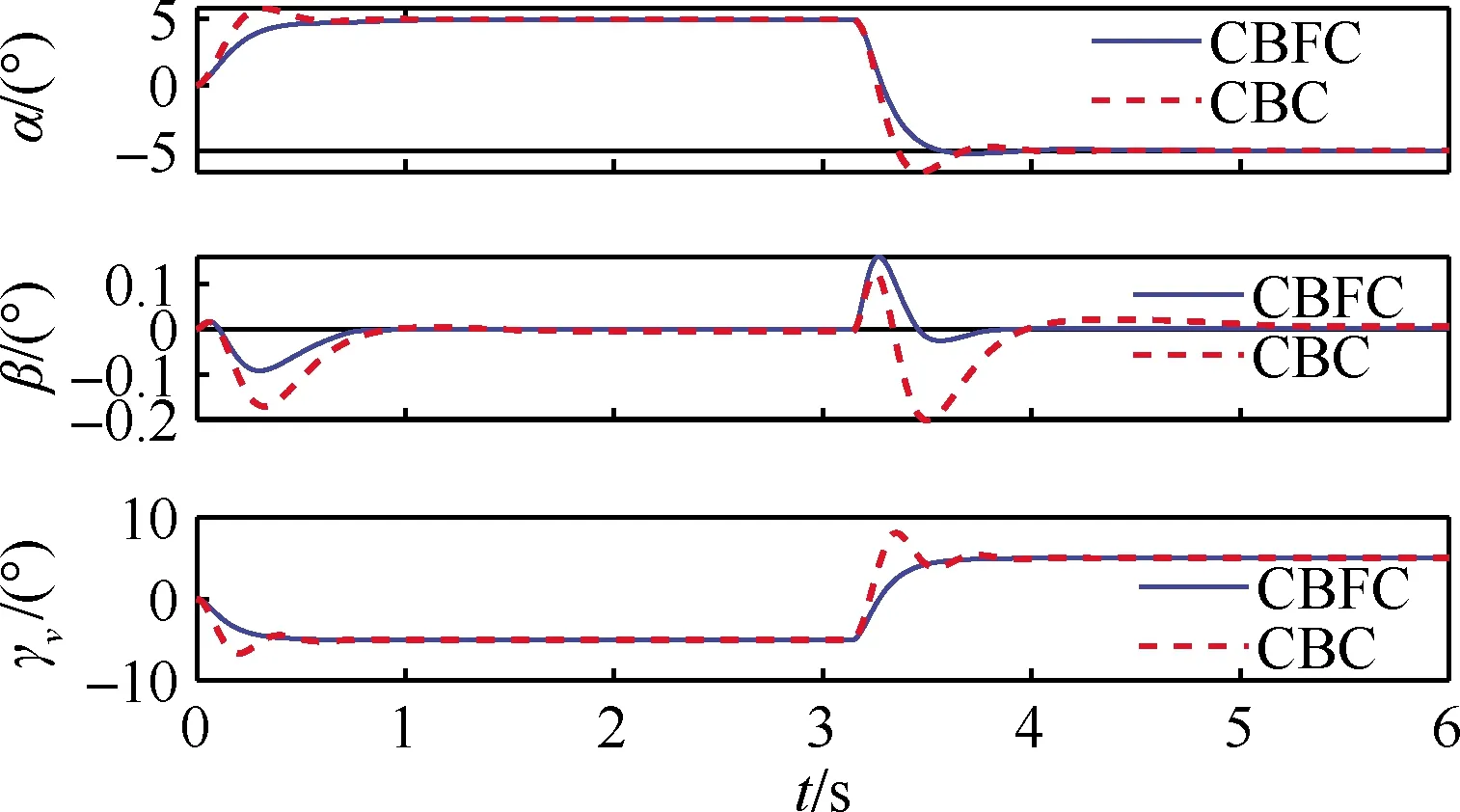
图3 攻角、侧滑角和倾侧角响应曲线Fig.3 Curves of angle of attack, angle of sideslip and bank angle
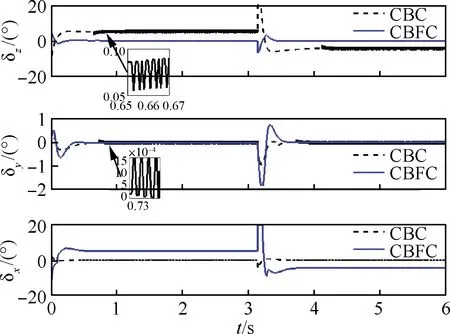
图4 俯仰、偏航和滚转舵偏曲线Fig.4 Curves of pitch, yaw and roll deflections
因此本文提出的CBFC控制器在保证飞行器跟踪性能的同时,有效降低了舵偏的抖振特性。
3.3 气动拉偏
为了验证控制系统的鲁棒性,首先对气动参数进行拉偏,其中气动力系数拉偏正负30%,力矩系数拉偏正负30%。
图5~图7分别给出了俯仰、滚转以及偏航通道在气动拉偏情况下的系统性能。从图5可以看出,俯仰通道在气动参数拉偏的情况下,仍然能够实现对指令的稳定跟踪,并且具有较短的响应时间,具有良好的动态特性和鲁棒性。同样从图6、图7也可以看出偏航和滚转通道也具备良好的动态特性和鲁棒性。
因此可以看出,CBFC控制器在气动拉偏的情况下,各通道均能实现对指令的精确跟踪和稳定控制,因此说明本文提出的CBFC控制器具有较强的鲁棒性。
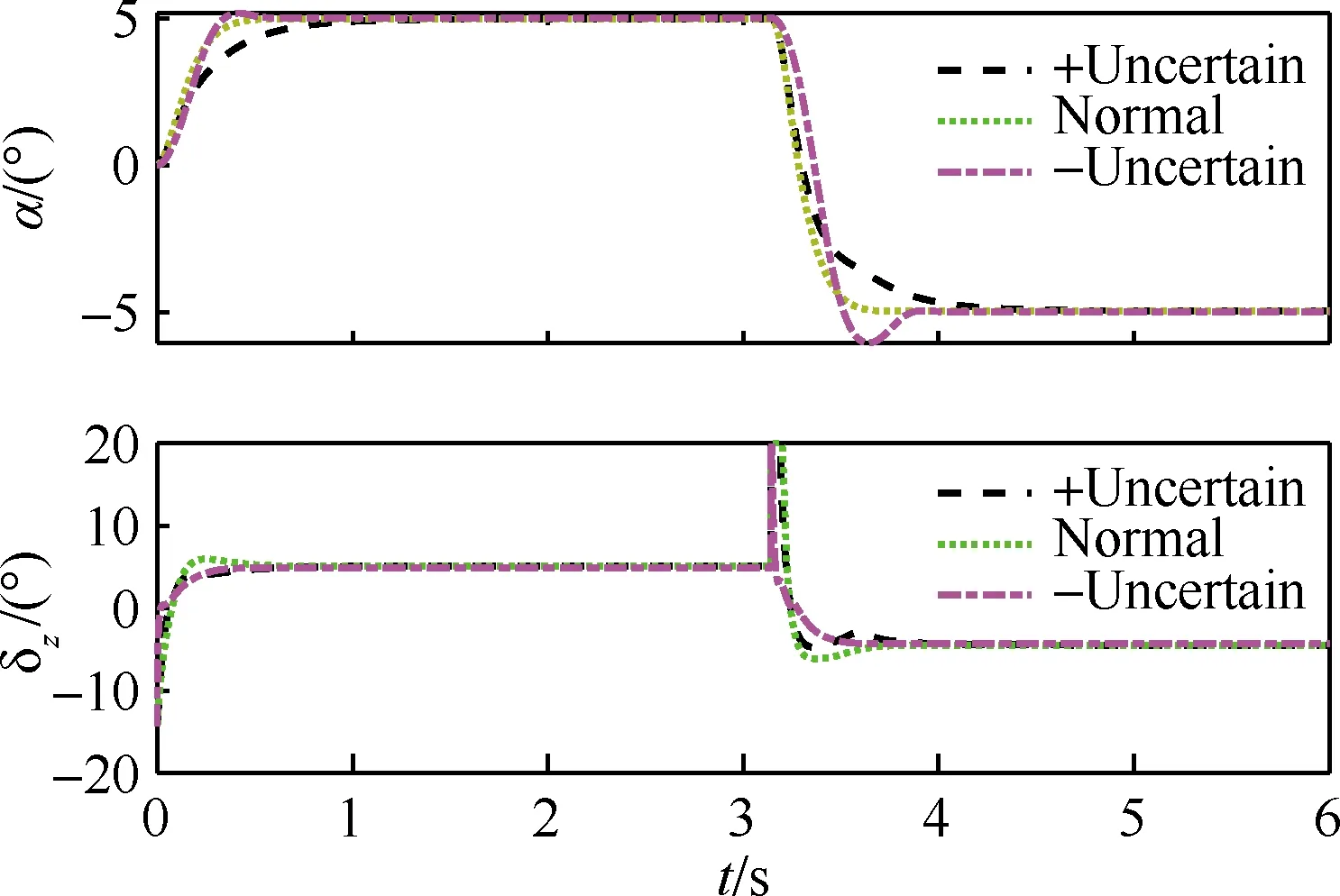
图5 俯仰通道变化曲线Fig.5 curves of pitch channel
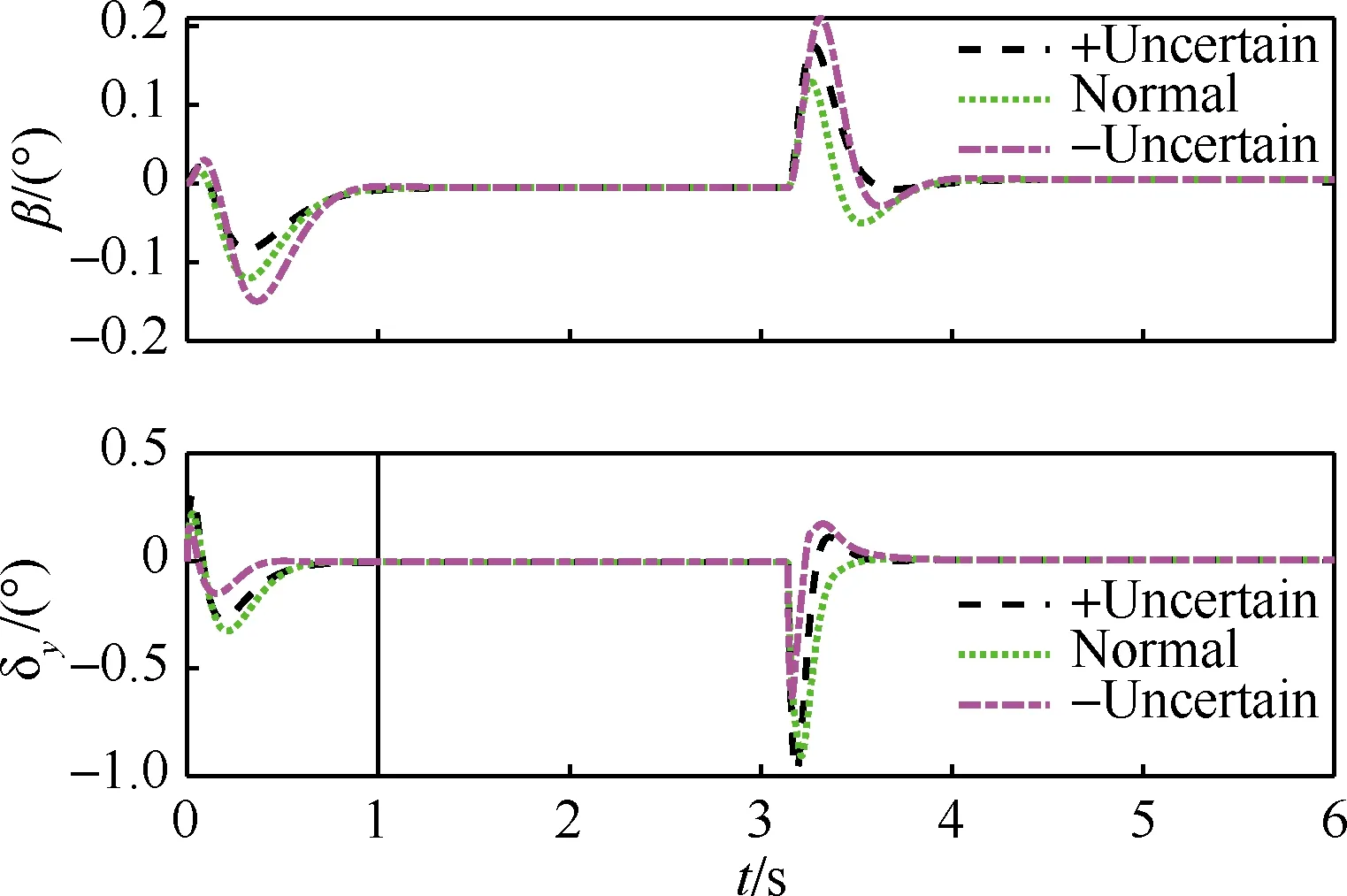
图6 偏航通道变化曲线Fig.6 Curves of yaw channel
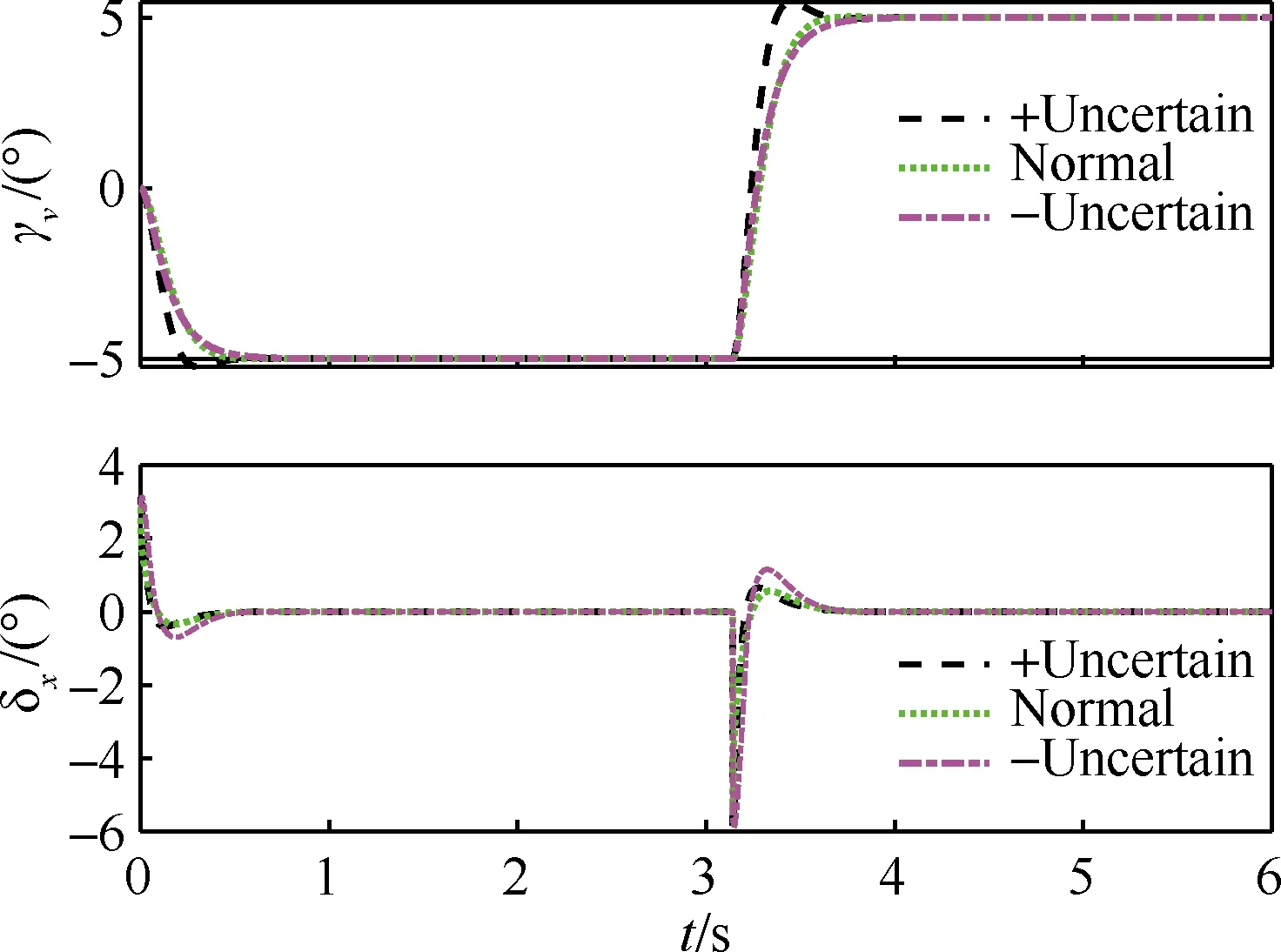
图7 滚转通道变化曲线Fig.7 Curves of roll channel
4 结 论
1) 本文提出的CBFC控制器解决了系统在对耦合适应的过程中,由评价指标切换引起的控制输入抖振问题。
2) CBFC控制器使得系统对耦合效应具有更好的自适应能力,同时使得闭环系统具有很强的鲁棒性。
3) 解决了工程设计中舵系统动态特性的问题,本文将一阶舵系统引入到绕质心动力学模型中。通过仿真校验说明了本文提出的方法具有较好的动态特性和鲁棒性。
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01
凤凰动漫(军事大王)(2022年1期)2022-04-19
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年6期)2021-07-20
北京航空航天大学学报(2021年6期)2021-07-20
北京航空航天大学学报(2020年3期)2021-01-14
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
劳动保护(2018年5期)2018-06-05