
四轮独立驱动电动车横摆力矩控制研究*
2020-12-03 08:01曹天琳李刚余志超姬晓
汽车工程师 2020年11期
曹天琳 李刚 余志超 姬晓
(辽宁工业大学汽车与交通工程学院)
近年来,国内外学者越来越重视汽车主动安全方面的研究。直接横摆力矩控制(DYC)系统是控制车辆稳定性的主动安全系统,DYC 系统和转向控制系统组成了车辆电子稳定性控制系统[1]。大部分研究都是基于传统车通过差动制动来实现对横摆力矩的控制,文章将用差动驱动的方法来实现。对于直接横摆力矩控制的研究,常用的方法有最优控制[2]、滑模控制[3-4]、PID 控制[5]等方法。文献[6]基于模糊控制原理,制定纯电动汽车ESC 系统的模糊控制策略;文献[7]采用分层控制结构,上层基于滑膜控制算法,以横摆角速度和质心侧偏角为控制变量,搭建了DYC 系统;文献[8]~文献[10]采用前馈和反馈的优化控制方法决策横摆力矩。汽车是复杂性很强的系统,建立精确的数学模型很难,而模糊控制作为一种智能控制理论,不需要精确的数学模型。因此,文章以四轮独立驱动电动车为载体,采用模糊控制理论对其横摆力矩进行研究。
1 控制原理
整车控制原理,如图1 所示。上层决策层中根据当前车速和转向盘转角借助二自由度车辆参考模型计算出期望的横摆角速度和质心侧偏角。将横摆角速度的差值和质心侧偏角差值作为模糊控制器输入量,通过模糊控制器计算出所需的附加横摆力矩。下层分配层将所需的目标驱动力矩和附加横摆力矩进行重新分配,驱动力矩规则分配器计算出每个车轮应该有的驱动力矩,将其值给到轮边驱动电机,使之产生相应大小
的驱动力矩,从而使左侧和右侧车轮驱动力不同,通过这种差动驱动的方式实现对汽车的直接横摆力矩控制。
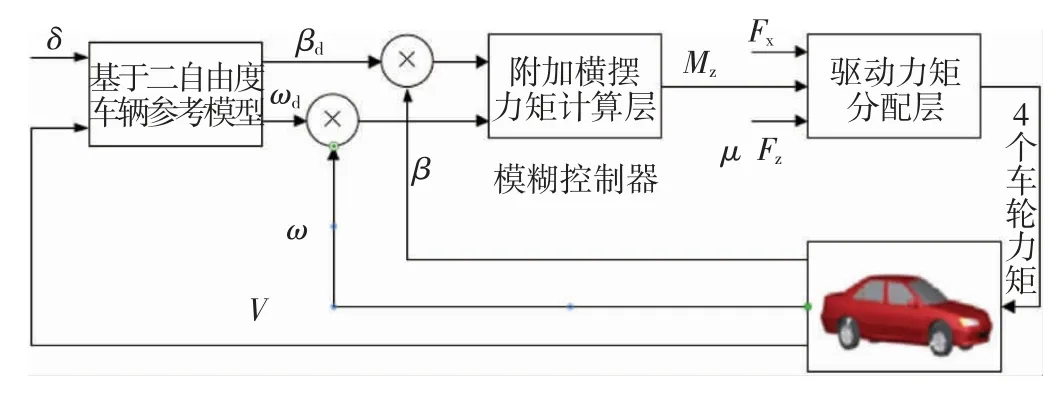
图1 整车控制原理图
2 附加横摆力矩模糊控制算法
2.1 参考模型
目前车辆控制领域广泛采用线性二自由度模型作为各种控制方法用的参考模型[11]。文章利用线性二自由度车辆参考模型计算出横摆角速度和质心侧偏角的期望值。线性二自由度模型,如图2 所示。
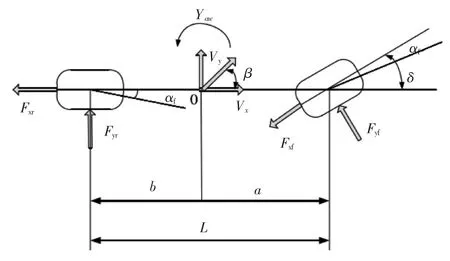
图2 线性二自由度模型
线性二自由度模型方程为:
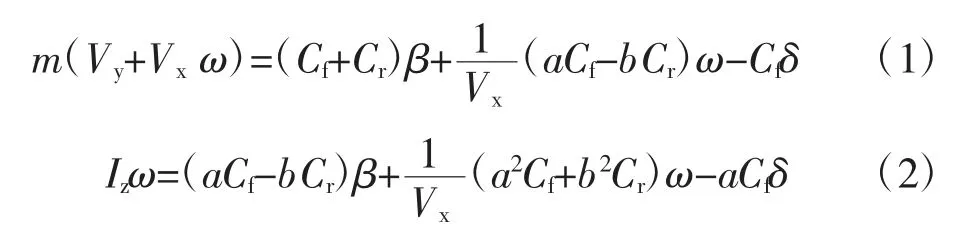
式中:m——汽车质量,kg;
Cf,Cr——前、后轮胎侧偏刚度,N·rad-1;
kf,kr——前、后车轴的侧偏刚度,N·rad-1;
Iz——汽车的转动惯量,kg·m2;
a,b——汽车前、后轴至质心的距离,m;
ω——横摆角速度,deg/s;
β——质心侧偏角,deg。
横摆角速度期望值(ωd/(deg/s))和质心侧偏角(βd/deg)期望值,如式(3)和式(4)所示。

式中:K——稳定性系数,s2/m2。
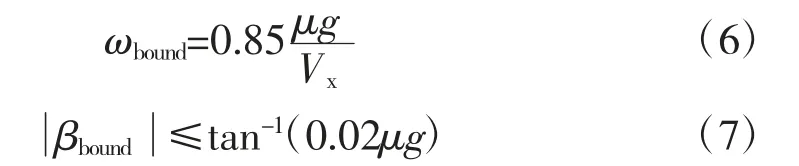
当轮胎达到附着极限时,二自由度参考模型计算出的期望横摆角速度和期望质心侧偏角不能满足车辆稳定行驶的要求,因此需要确定临界值。横摆角速度临界值(ωbound/(deg/s))和质心侧偏角(βbound/deg)临界值[12]分别为:
2.2 模糊控制器设计
1)模糊控制器的输入、输出变量:输入变量为横摆角速度偏差和质心侧偏角偏差Δω、Δβ,输出变量为所需的附加横摆力矩ΔM。
2)确定变量的模糊化条件:根据输入、输出变量的实际变化范围,确定物理论域,并将其转化为相应的模糊论域。文章将输入变量模糊论域设为[-3,3],将输出变量模糊论域设为[-1,1],同时通过量化因子和比例因子进行比例缩放,实现变量论域的变换。量化因子ke和比例因子ku的定义,如式(8)和式(9)所示。

式中:n1——输入变量模糊论域;
e——输入变量的物理论域;
u——输出变量物理论域;
n2——输出变量模糊论域。
根据实际物理论域和模糊论域,文章选取Δγ 量化因子ke1=0.1,Δβ 量化因子ke2=1,ΔM量化因子ku=3 000。
输入语言变量模糊子集为{NB,NS,Z,PS,PB},输出语言变量模糊子集为{NB,NM,NS,Z,PS,PM,PB}。其中,NB 为负大、NM 为负中、NS 为负小、Z 为零、PS 为正小、PM 为正中、PB 为正大。
3)设置输入变量的隶属度函数:使用MATLAB 软件编写m 文件创建模糊控制器。模糊语言输入、输出变量隶属度函数具体设置,如图3 和图4 所示。
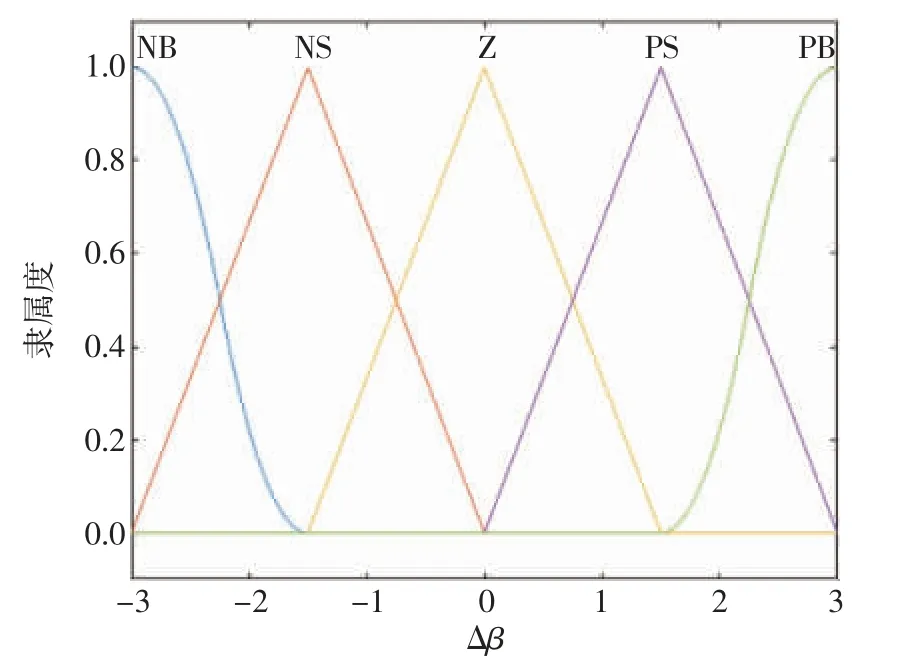
图3 输入量Δω 和Δβ 隶属度
4)模糊规则的建立:依据大量的软件仿真结果和车辆动力学理论基础,制定出合理的模糊控制器输出语言变量。模糊控制规则[13],如表1 所示。
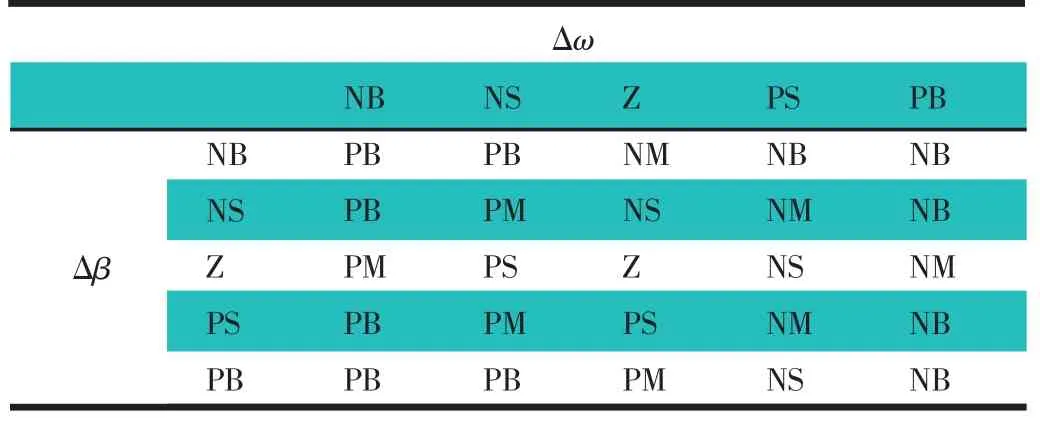
表1 模糊控制规则
5)确定去模糊化方法:去模糊化就是将模糊量和精确量之间进行转换。另外,物理论域和模糊论域之间还需要进行变换论域。常见的去模糊化方法有最大隶属度法、加权平均法、面积中心法等,选取面积中心法作为模糊控制策略的清晰化方法。输入/输出特性曲面,如图5 所示。
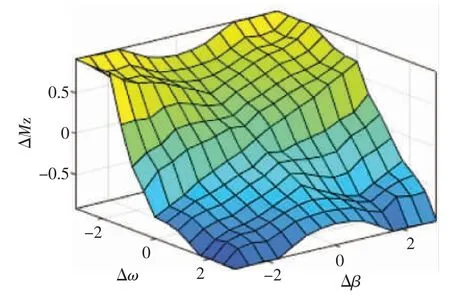
图5 输入/输出特性曲面
3 驱动力分配规则
决策层计算出的附加横摆力矩通过控制4 个车轮轮边电机输出转矩实现。制定驱动力分配规则:内侧2个车轮的驱动力相同,外侧2 个车轮的驱动力相同,并且内外侧驱动力不同,使其在前轴和后轴上各产生所需附加横摆力矩的一半[14]。分配规则如下:
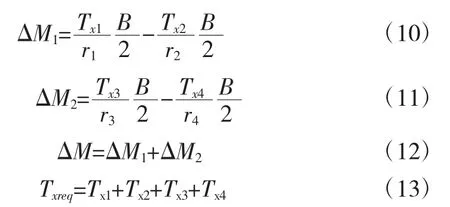
式中:Tx1,Tx2,Tx3,Tx4——4 个车轮驱动力矩,N·m;
r1,r2,r3,r4——4 个车轮半径,m,因为轮胎型号相同,所以各车轮半径相等;
B——车辆的轮距,m;
ΔM1,ΔM2——前、后轴所产生的附加横摆力矩,N·m;
ΔM——总的横摆力矩,N·m;
Txreq——目标驱动力矩,N·m。
4 仿真验证
为了验证控制方法的有效性,选取CarSim 中的A-Class Hatchback 车辆模型,进行MATLAB/Simulink和CarSim 联合仿真。试验选取2 种工况:工况1 为汽车以80 km/h 速度在路面附着系数为0.8 的路面进行蛇形绕桩;工况2 为汽车以60 km/h 速度在路面附着系数为0.5 的路面进行双移线行驶。工况1 的仿真结果,如图6~图8 所示。从图6~图8 可以看出,汽车在没有控制时虽然没有发生完全失稳,但是有很大的甩尾趋势。附加横摆力矩施加控制时,有效地降低了拐点处横摆角速度和质心侧偏角的大小,从而减小了甩尾趋势,避免了下一时刻危险的出现。驱动力矩的变化趋势也很好地对应了图6~图8 的变化。工况2 仿真结果,如图9~图11 所示。
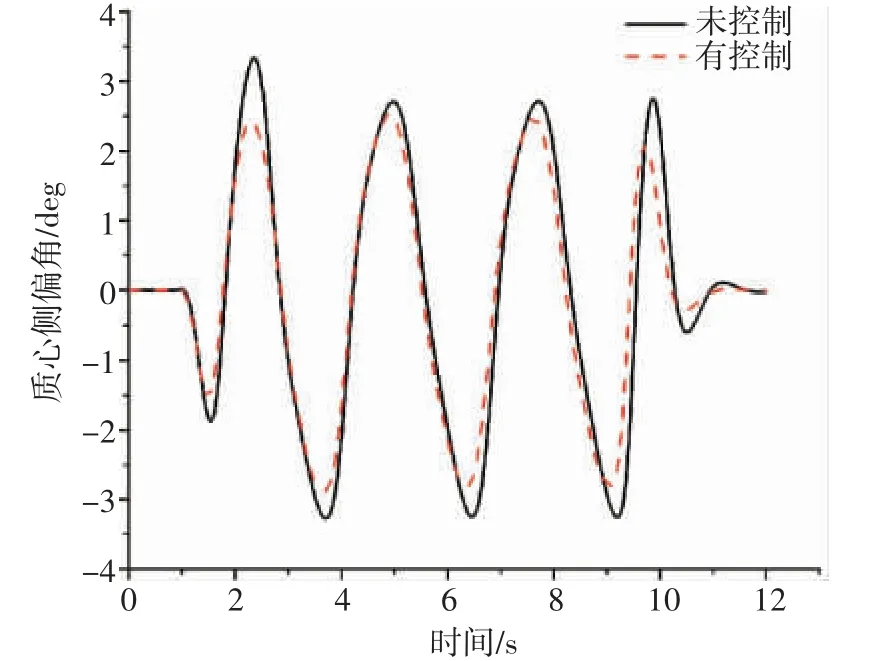
图7 质心侧偏角对比图
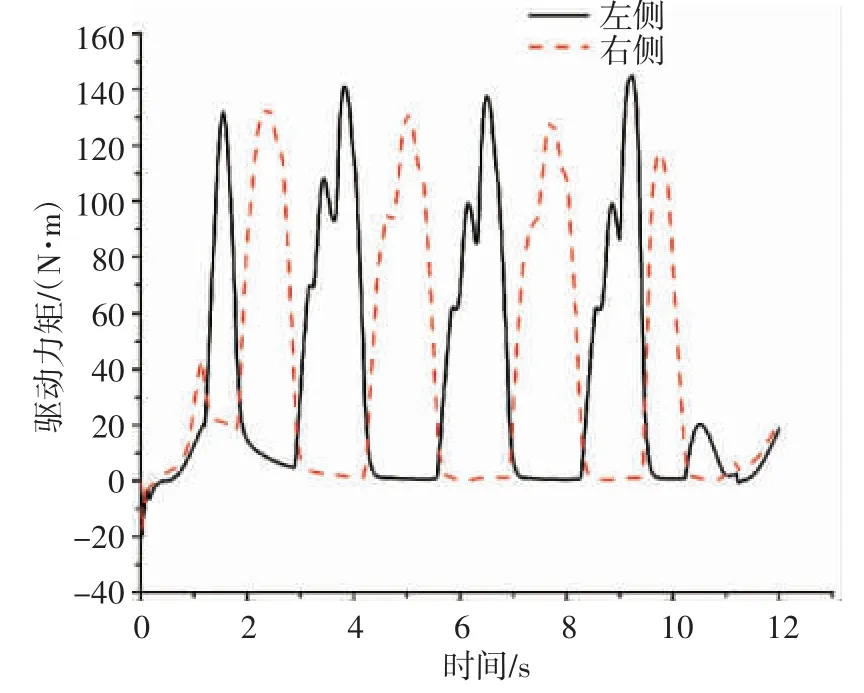
图8 车轮驱动力矩
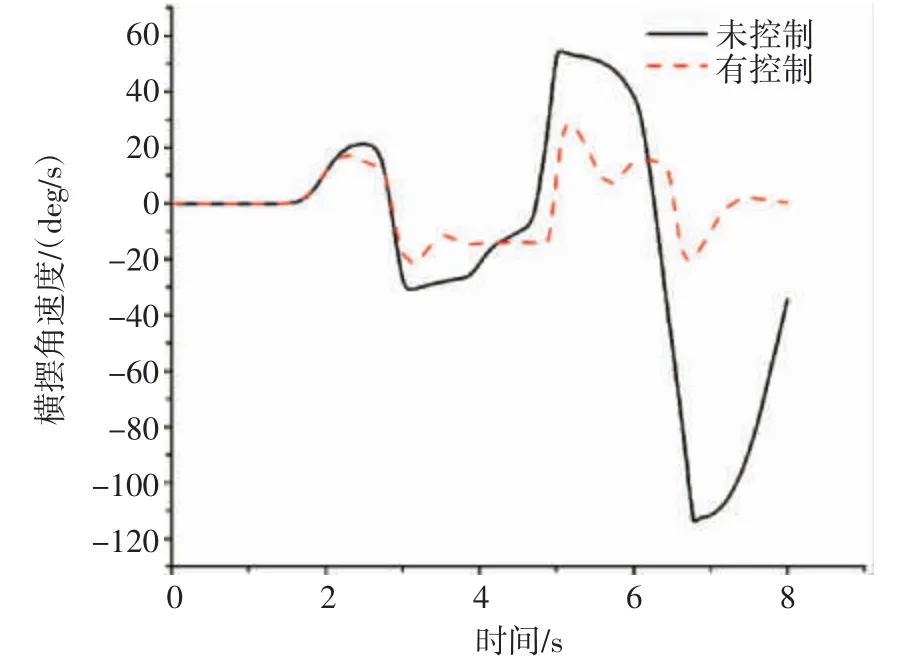
图9 横摆角速度对比图
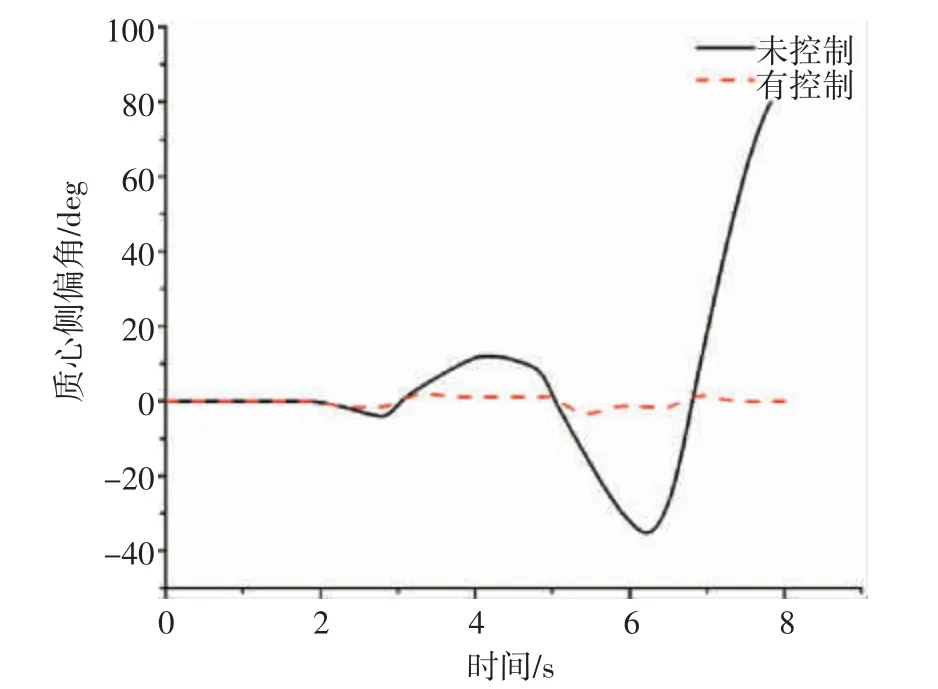
图10 质心侧偏角对比图

图11 车轮驱动力矩
从图11 可以看出,汽车没有控制时,在5 s 处横摆角速度和质心侧偏角会发生剧烈变化,汽车完全失稳,不能够按照期望路径行驶。附加横摆力矩施加控制时能够有效地降低横摆角速度和质心侧偏角的大小,从而避免汽车完全失稳,使其按照期望路径行驶。驱动力矩的变化趋势也很好地对应了图9~图11 的变化。
5 结论
文章基于四轮独立驱动电动车通过差动驱动的方式实现对横摆力矩的控制,除了能够提高汽车的行驶稳定性,还能够很好地满足驾驶员的驾驶意图,不会通过牺牲速度来提高稳定性。电动汽车是汽车发展的必然趋势,通过这种控制可以很好地提高稳定性,所以此研究既有理论意义也有实际价值。除此以外,还可以用差动驱动和差动制动相结合的方式对横摆力矩进行优化控制,以做进一步的研究。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
新课程·中学(2019年7期)2019-09-17
电子技术与软件工程(2019年8期)2019-07-16
中学生数理化·教与学(2019年5期)2019-06-06
中学课程辅导·教师通讯(2018年10期)2018-09-04
物理教学探讨(2018年1期)2018-02-13
中学生数理化·高一版(2017年3期)2017-07-08
