
一种新型领从式多弹协同制导律设计
2020-12-03 00:55张振林郭正玉吕梅柏韩治国
航空兵器 2020年5期
张振林,张 科*,郭正玉,吕梅柏,王 佩,韩治国
(1.西北工业大学 航天学院,西安 710072;2.中国空空导弹研究院,河南 洛阳 471009)
0 引 言
为提高导弹打击能力,现有研究主要集中在两方面:一是提高单枚导弹性能,但付出代价较大;二是利用现有导弹并采用一定策略实现协同攻击。多导弹时间协同策略是指依靠弹间信息交互,多枚导弹在同一时间命中目标,可以取得较好作战效果。
目前协同制导律的设计主要集中在二维空间。张保峰等人采用变结构控制理论设计了时间和角度约束的制导律,并且提出一种切换思想,在时间和角度制导律中切换,实现多导弹时间协同和角度约束[1]。Yao等人基于非线性动力学系统设计了一种新的制导律解决寻的导弹的攻击时间和角度问题。该制导律将TSVM技术应用于终端约束,采用含有两个未知参数的TSVM面分别控制时间和角度[2]。Jeon等人在传统PN制导律的基础上,增加了一个攻击时间误差反馈偏置项,用来控制攻击时间,该方法被称为ITCG(Impact-Time-Control-Gui-dance)[3]。Saleem等人针对多弹协同攻击同一静止目标提出了一种基于Lyapunov稳定性定理的制导律。该制导律根据初始航向误差和初始弹目距离,得到了一个封闭形式的剩余时间表达式,只需控制单个参数即可实现对攻击时间的控制[4]。Cho等人针对滑模变结构存在奇异的问题,在制导指令中加入一个正连续非线性函数,使得李亚普诺夫稳定性为负半定,可以实现不存在测量噪声情况下对静止目标的协同攻击[5]。Arita等人研究了在指定的时间和角度对目标进行攻击的最优制导律设计问题,将该制导律归结为两点边值问题,通过求解两点边值确定的状态变量和参数得到最优输入[6]。Kumar等人采用滑模变结构控制理论和非线性接触动力学设计滑模面,成功实现指定时间攻击的制导律[7]。上述文献都是二维空间内的协同制导律设计,虽不能真实反映现实攻击场景,但对三维多弹协同制导律设计提供了研究基础。
现有的三维时间协同制导律设计集中在利用剩余时间进行弹间协调。宋俊红等人基于连通无向图和多智能体有限时间一致性理论等对多导弹时间协同制导律进行设计;采用滑模变结构控制的方法,成功实现带角度约束的时间协同,但需要导弹速度可控[8]。张友根等人采用两阶段控制方法对多导弹时间和角度进行控制,第一阶段采用时标分离的方法设计出期望的慢子系统和快子系统,实现实际弹目距离与期望弹目距离曲线的跟踪;对角度的跟踪采用动态逆的方法,得到两通道控制指令[9]。马国欣等人采用领从式策略设计了时间协同制导律,领弹的俯仰和偏航通道采用增广比例导引,从弹采用机动控制跟踪领弹的前置角,实现时间协同[10]。肖增博等人针对无终端约束和有终端约束的情况,提出了一种基于定向自组织原理,根据所需的动态性能指标求解系统的控制律[11]。Wang针对多弹协同攻击同一目标,采用滑模变结构控制的方法设计了一种分布式协同制导律,该制导律利用剩余时间信息调整对各导弹之间误差,实现协同攻击[12]。文献[13]针对导弹三维协同攻击,提出一种基于网络同步原理的制导方法,通过仿真结果可知,此控制方法十分有效。文献[14]针对多导弹攻击大型目标这一场景,基于滑模控制方法,提出一种非奇异滑模制导律,并采用虚拟目标的设计思路,设计了一种适用于机动目标的导弹剩余飞行时间估计方法,能够实现饱和攻击。Li等人利用模型预测静态规划(MPSP)方法设计了三维时间协同和角度控制的制导律[15]。三维时间协同制导律的设计虽取得了一定成果,但多集中在对导弹速度可控的假设上,现有的导弹性能还不能达到这一要求。杨剑影等人针对多弹协同攻击高机动目标的情形,从飞行制导、飞行控制制导一体化等方面提出了解决思路[16]。
本文针对导弹速度不可控前提下的多弹协同攻击问题进行研究,着力降低导弹的协同时间误差。
1 多导弹时间协同三维导引律设计模型
在建立弹目相对运动方程时,考虑多枚导弹攻击指挥所、机场等静止目标的情况,建立导弹与目标的相对运动关系,如图1~2所示。
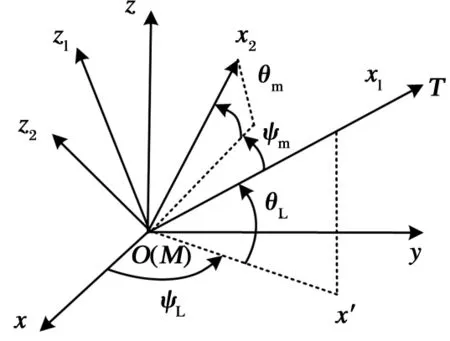
图1 单枚导弹与目标的相对运动关系Fig.1 Relative motion relationship between missile and target

图2 领弹、第i枚从弹与目标的相对运动关系Fig.2 The relative motion relationship between the leader, the ith follower and the target
图中,Oxyz为参考坐标系;Oxlylzl为弹目视线坐标系;Ox2y2z2为弹道坐标系;ψL和θL为由参考坐标系Oxyz到视线坐标系Oxlylzl转换(第一次绕z轴旋转,第二次绕yl轴旋转)对应的欧拉角,即弹目视线矢量相对惯性坐标系的方位角和高低角;ψm和θm为由视线坐标系Oxlylzl到导弹的弹道坐标系Ox2y2z2转换对应的欧拉角,即导弹速度矢量相对视线坐标系的方位角和高低角。

基于以上假设条件,推导三维空间中的导弹和目标相对运动关系模型。根据哥式定理可得如下关系式:
(1)

(2)
将式(2)代入式(1),并在视线坐标系下展开整理得:

(3)

由假设可知本文的加速度与速度方向垂直,可以通过角速度矢量与线速度矢量进行叉乘运算得到加速度表达式如下:
Am=ωVm×Vm=(ωLL+ωm)×Vm
(4)

(5)
将ωLL和ωm的代入式(4)中,得
(6)
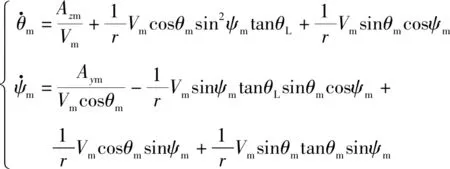
结合式(4)和式(6),得到领弹和第i枚从弹的弹目相对运动方程如下:
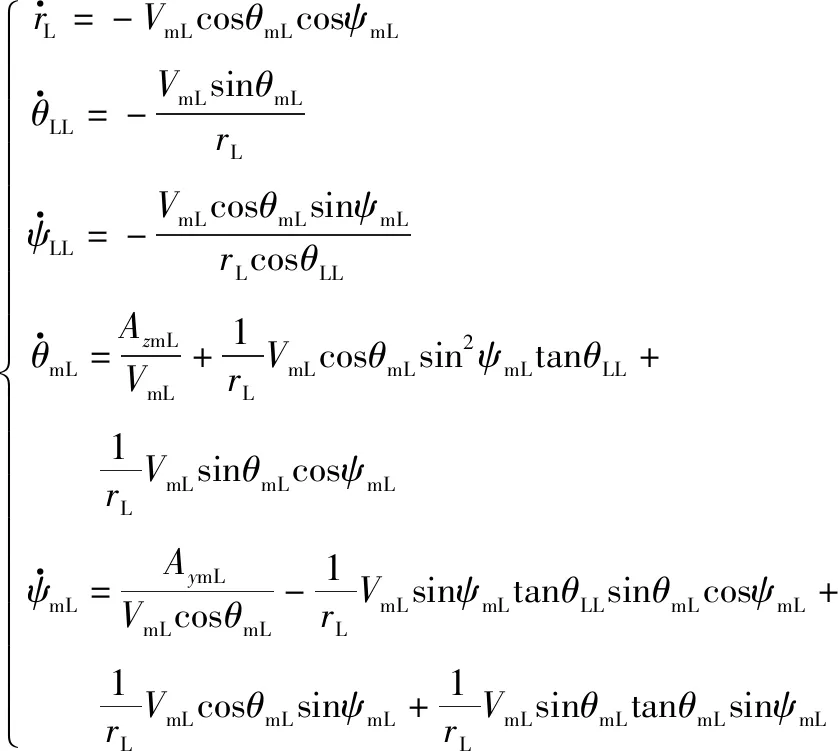
(7)

(8)
2 多导弹时间协同三维导引律设计
本文采用领从式策略实现多弹攻击时间协同。考虑到导弹的剩余弹目距离随着时间的变化逐渐趋于零,故将对攻击时间的控制转化为对弹目距离变化的跟踪控制,即从弹剩余弹目距离在有限时间内跟踪上领弹剩余弹目距离,可实现多弹在领弹弹目距离为零时击中目标。弹目距离跟踪趋近示意图如图3所示。

图3 弹目距离跟踪趋近示意图Fig.3 Schematic diagram of the distance between missile and target tracking approach
本文领弹采用增广比例导引律,从弹利用二阶非线性系统对制导律进行设计,实现领弹和从弹的时间协同。
(1) 领弹制导律设计[11]
(9)

(10)
式中:kL1和kL2均为增广比例导引系数。
(2) 第i枚从弹制导律设计
考虑一类二阶非线性系统:
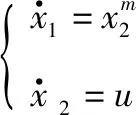
(11)
式中:m为正奇数。
引理1:下列形式的反馈控制器可以令式(11)所示的系统在有限时间内趋于稳定[17-18]:

(12)
式中:k1,k2>0;0<α<1/m;β=(m+1)α/(1+α)。
将从弹剩余弹目距离与领弹剩余弹目距离的偏差视为控制状态变量,设计辅助状态变量如下:

(13)
式中:ri为第i枚从弹的剩余弹目距离;rL为领弹的剩余弹目距离,此时的rL看作常值。结合弹目运动关系式(8),可得辅助状态方程:

(14)
为使状态方程符合式(11)的形式,将式(14)进行反馈线性化,得
(15)
式中:p1+p2=1。将式(15)带入式(14),可以得到线性化的辅助状态方程形式:

(16)
式中:m=1为奇数。参考引理1,令

(17)
式中:k1,k2>0;0<α<1;β=2α/(1+α)。


(18)


(19)
式(19)是整个控制律的前提条件。结合式(18)~(19),整理并化简,分情况讨论奇异下的从弹制导律形式:
(1) 当θmi=0且ψmi=0时

(20)
(2) 当θmi=0且ψmi≠0时
(21)
(3) 当θmi≠0且ψmi=0时
(22)
(4) 当θmi≠0且ψmi≠0时

(23)
式中:ε=10-6;z1和z2的取值参考式(13)。
3 仿真分析
针对多导弹齐射攻击指挥所、机场等静止目标时的场景,假设有3枚导弹,速度均保持恒定,其他信息如表1所示。待攻击目标在(0,0,0)点且静止,期望在同一时刻3枚导弹击中目标。值得注意的是,表中的速度高低角和方位角分别表示速度矢量相对于视线坐标系的高低角和方位角;视线高低角和视线方位角表示弹目视线的高低角和方位角。与现有领从式[10]的仿真结果进行对比,两种领从式仿真的初始条件一致,增广比例导引系数一致。针对表 1 所示的3枚导弹,领弹增广比例导引系数如下:kL1=2,kL2=-5;从弹模型参数如下:k1=20,k2=20,α=0.6,β=0.75,ε=10-6,p1=0.45,p2=0.55,导弹加速度最大幅值为AM=5g。利用式(19)~(23)所示的控制律形式仿真结果如图4~10所示。

图4 三维弹道轨迹Fig.4 Three dimensional trajectory

表1 导弹参数信息Table 1 Missile parameter information
由图5可知,本制导律下两枚从弹在6 s左右跟踪上领弹的剩余弹目距离,而且和领弹的剩余弹目距离在同一时刻趋于零值,实现多枚导弹的时间协同,击中时刻3枚导弹的时间误差很小。图6中的从弹跟踪上领弹的剩 余弹目距离时间约在13 s左右,且在击中时刻存在一定的协同时间误差。将图5和图6对比可知,本文方法的协同精度较高。由图7~8可知,导弹在攻击过程中,导弹速度逐渐指向目标,即速度在视线坐标系中的倾角和偏角逐渐趋于零,符合导弹实际攻击目标时的情况。由图9~10可知,在整个飞行过程中,时间协同主要是靠偏航通道加速度来调节,所以幅值相较于俯仰通道较大。
图8 速度方位角变化曲线Fig.8 Velocityazimuthchangecurve图9 偏航通道加速度曲线Fig.9 Pitchchannelaccelerationcurve图10 俯仰通道加速度曲线Fig.10 Yawchannelaccelerationcurve
表2中Leader-Follower代表本文制导律的仿真结果,leader-follower是现有领从式的仿真结果,两种制导律结果进行对比,可以发现本文设计的制导律在脱靶量和协同时间差上都要优于现有的领从式制导律。

表2 仿真结果Table 2 Simulation result
4 结 论
本文针对现有协同攻击存在一定的协同时间误差的问题,设计了一种新型制导律。与现有领从式制导律最大的不同是,本文将对攻击时间的控制转化为对剩余弹目距离跟踪的控制,不需要进行剩余时间估计,协同精度更高。针对指挥所、机场等静止目标,假设导弹速度恒定,领弹采用增广比例导引,从弹采用二阶非线性系统的有限时间收敛特性设计控制量,其后对获得的控制量进行解耦设计,分别得到俯仰通道和偏航通道的控制量,采用本文的制导律进行仿真,验证了该制导律的有效性和可行性。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
北京航空航天大学学报(2022年5期)2022-06-06
新班主任(2022年4期)2022-04-27
导航定位学报(2022年2期)2022-04-11
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年6期)2021-07-20
语数外学习·高中版中旬(2021年11期)2021-02-14
中国新技术新产品(2020年19期)2020-12-25
汽车观察(2019年2期)2019-03-15
考试周刊(2018年15期)2018-01-21
