径向特征下的改进三角形星图识别算法*
2020-12-07 09:19刘先一张志利周召发常振军
国防科技大学学报 2020年6期
刘先一,张志利,周召发,常振军
(火箭军工程大学 导弹工程学院, 陕西 西安 710025)
星敏感器是一种依靠获取的星图进行定姿的高精度天文装置,已经广泛运用于航空航天领域[1],对获取的星图进行识别是一项重要的工作。目前,常用的星图识别算法主要分为模式识别和子图同构类星图识别算法两大类[2-4]。栅格识别算法作为典型的模式识别算法,受选星的影响较大,星点的选择会影响到栅格算法的识别率[5-6]。三角形星图识别算法是子图同构类星图识别算法的典型算法,具有可靠性高等优点,在工程实践中仍然在广泛使用[7],但是在识别的过程中需要遍历星点,存在冗余匹配和误匹配,且识别效率较低[8-9]。近年来,又出现了对三角形识别算法的改进算法,如三角形内切圆等算法[10-11],但这些算法并未从根本上克服三角形识别算法的不足,实用性都有待进一步提高[12-13]。
考虑到三角形星图识别算法的广泛使用性,本文将对该算法进行改进,以克服三角形星图识别算法存在冗余匹配和误匹配的不足。本文拟构建拍摄星点与导航星的径向分布特征,通过径向特征对星点进行初始识别,针对初始识别的结果,再进行三角形星图识别。这样可使星图识别更具有针对性,从而提高星图识别的准确性。
1 改进三角形星图识别算法
在对三角形星图识别算法进行改进时,主要涉及星点径向特征的构建以及在初始识别结果基础上的三角形星图识别两个方面的内容。
1.1 星点径向特征的构建
在进行星图识别时,通过识别星点和导航星的几何分布分别构建识别星点与导航星的唯一“描述量”,通过几何描述量对拍摄的星点进行初始识别。
如图1所示,把待识别恒星S作为中心,选择识别半径R,将半径R内的圆形区域作为径向特征区域。将径向特征区域划分为等间距的圆环,圆环宽为Δr,以待识别星S为中心沿径向向外的圆环依次为G1,G2,…,GNq。分别计算特征区域内恒星与待识别星S之间的角距,确定该恒星所处的圆环,并将此圆环的特征值记为1。径向特征量表示为A=(B1,B2,…,Bh),h=1,2,…,Nq。当Bh=1时,表示在该环带里存在着恒星星点;当Bh=0时,表示在该环带里没有恒星星点。
图1 星点径向特征Fig.1 Radial feature of star point
为了更加细致准确地对星点的几何分布进行描述,在选取识别半径R和圆环宽Δr时,首先分别计算提取的恒星星点角距以及导航星之间的角距,然后选取最大的角距值作为识别半径R,选取最小的角距值作为圆环宽Δr,从而分辨出每一颗星点。如图2所示,任意两颗导航星之间的角距为d(i,j)。
图2 导航星之间的角距Fig.2 Angular distance of navigation star
(1)

(2)

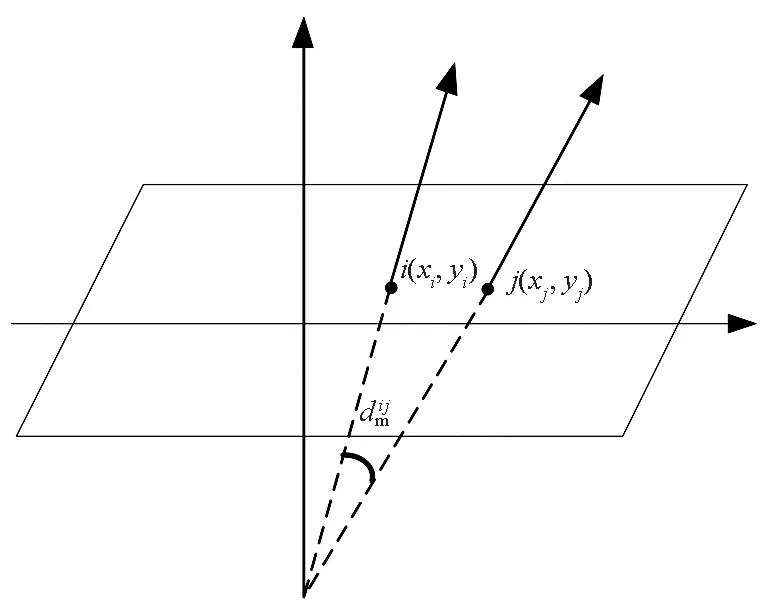
图3 恒星星点之间的角距Fig.3 Angular distance of star point
这里选取的识别半径R和圆环宽Δr分别为:
(3)
显然,圆环数目Nq=int(R/Δr),int表示向上取整。依据计算的恒星角距值和圆环宽对星点的几何分布进行描述,构建的每一颗观测星点k的径向特征量为Akh=(Bk1,Bk2,…,Bkh),h=1,2,…,Nq,每一颗导航星i的径向特征量为Aih=(Bi1,Bi2,…,Bih),h=1,2,…,Nq。对构建的导航星与观测星的径向特征量的每一位数值进行逻辑与值运算。
(4)

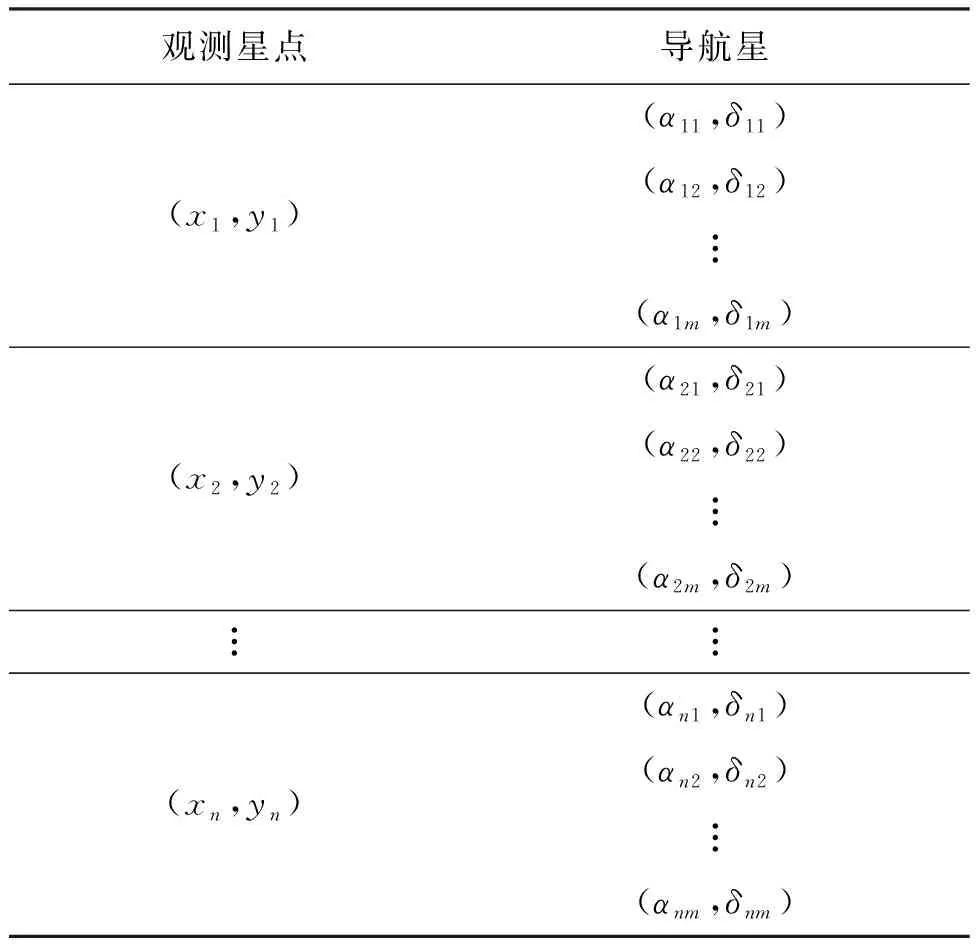
表1 径向特征的识别结果
在此基础上再进行三角形星图识别时不再需要遍历导航星,这样将大大减小冗余匹配,使星图识别更具有针对性,提高星图识别的效率。
1.2 三角形星图识别算法
目前,三角形星图识别算法为边—边—边匹配模式,如图4所示。
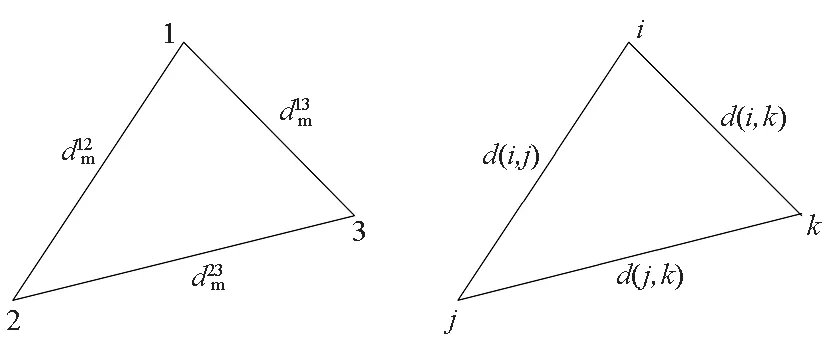
图4 三角形匹配Fig.4 Triangle matching
若由拍摄星点构成的观测三角形与星表中的导航三角形能够匹配,则必须同时满足:
(5)

(6)
由以上分析可知,采用基于径向特征的改进三角形进行星图识别时,不再需要遍历所有的导航星,这样使星点识别更具针对性,同时减少了计算量。
2 试验数据分析
为了验证基于径向特征的改进三角形星图识别算法的有效性,采用星敏感器在地面条件下进行多幅恒星星图的拍摄。实验过程中采用的星敏感器的视场角为4°×4°,星敏感器中的CCD图像传感器的分辨率为4096×4096,像素大小为9 μm。
对任意一幅星图进行处理,提取出拍摄的星点坐标数据,并结合视场范围的导航星数据进行星图识别。采用径向特征对星点进行初始识别,初始识别的结果如表2所示(由于篇幅所限,这里只给出部分初始识别的结果)。
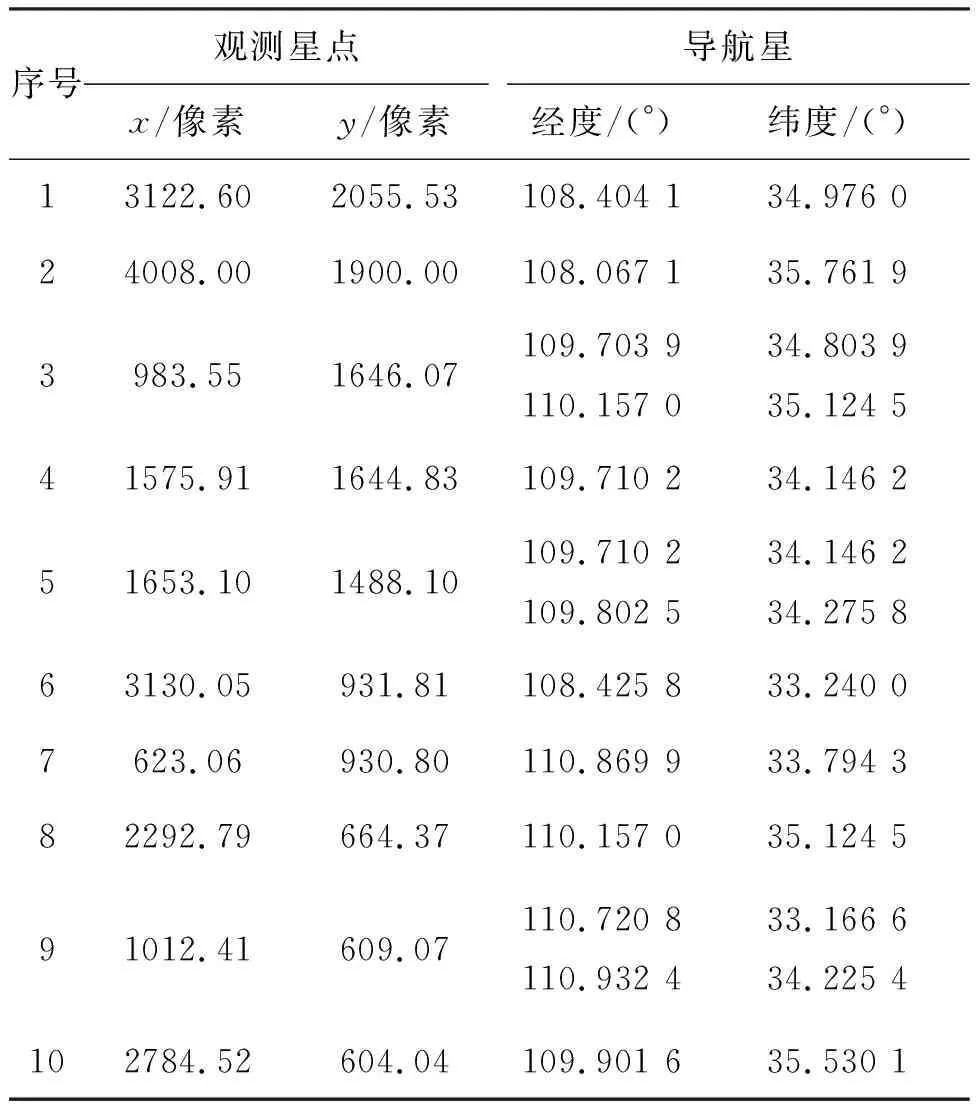
表2 初始识别的结果
从表2初始识别的结果可以看出,存在着一个观测星点对应多颗导航星的情况。在初始识别的基础上通过三角形星图识别方法再次进行识别,使识别过程更具有针对性,识别的结果如表3所示。

表3 识别结果
从表3可以看出,对初始识别的结果再次进行识别时,能够有效减少误识别的可能性,使识别结果更具有针对性。
直接采用三角形星图识别算法对该幅星图进行识别时,在识别的结果中存在着误识别的星点数据。此时存在着不同的观测星点对应同一颗导航星的现象,部分误识别数据如表4所示。
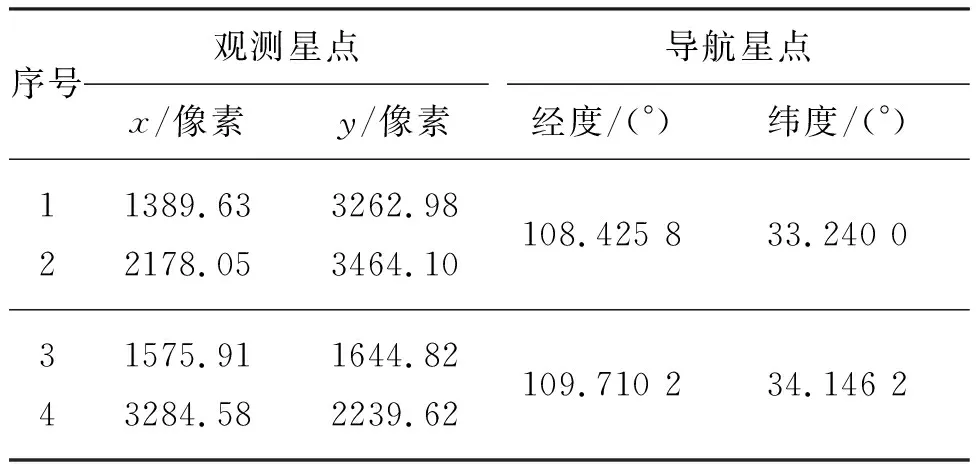
表4 部分误识别数据
图5展示了星点出现误识别时的情况,此时拍摄的两颗恒星像点识别对应的是同一颗恒星。
分别采用三角形星图识别算法与基于径向特征的改进三角形星图识别算法对拍摄的多幅星图进行识别,误识别的星点数目如图6所示。
显然,从图6可以看出,相较于三角形星图识别算法而言,基于径向特征的改进三角形星图识别算法减少了对星点的误识别,提高了星图识别的正确性。

(a) 误识别恒星的图像坐标(a) Image coordinates of mismatched stars

(b) 误识别恒星的天文坐标(b) Astronomical coordinates of mismatched stars图5 误识别的恒星Fig.5 Mismatched stars
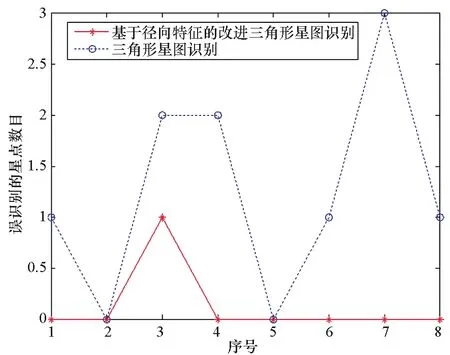
图6 误识别的星点数目Fig.6 Number of misidentified stars
3 结论
星图识别方法是天文测量装置中的一项关键技术,当前对星图识别算法的研究虽然较多,但是三角形星图识别算法依赖其可靠性与可操作性仍在广泛使用。本文引入了星点分布的径向特征量进行初始识别,并在此基础上进行三角形识别,使星图识别的准确性和针对性都得到了提高,克服了三角形星图识别算法存在冗余匹配与误识别的不足。
猜你喜欢
军事文摘(2022年12期)2022-07-13
数学物理学报(2022年1期)2022-03-16
数学年刊A辑(中文版)(2022年4期)2022-02-16
现代畜牧科技(2021年4期)2021-07-21
综艺报(2019年15期)2019-08-16
现代装饰(2019年7期)2019-07-25
小天使·二年级语数英综合(2017年10期)2017-10-31
三联生活周刊(2016年43期)2016-10-28
中成药(2016年8期)2016-05-17
中成药(2016年4期)2016-05-17