
基于单片机的小型智能除草机器人设计
2020-12-14 04:08张新星石慧君邵逸帆何仁宇童丹绘
科学与财富 2020年30期
张新星 石慧君 邵逸帆 何仁宇 童丹绘


摘 要:介绍一种利用Arduino mega 2560单片机控制和图像识别进行除草的机器人设计。给出具体方案,包含树莓派,单片机,超声波,机械手等模块。此设计具有功能丰富,易控制,工作可靠,速度迅速的优点。
关键词: Arduino;Opencv;树莓派;杂草识别;农业机械化;舵机;超声波
1 引言
农业除草是农业生产中相对耗费时间和金钱的一项活动,也是农业机械化道路上的一大阻碍,本项目基于这一事实研发设计了一种小巧灵活能够运作于田垄间的除草机器人,能够有效的识别作物与杂草的区别,并将杂草清除,大大提高农业生产效率。国外在除草机器人这一方面已有一定的发展,而中国再此方面有待发展,正因此国家正在大力农业机械化,江苏大学也推进极力推进农机自动化,故此次设计除草机器人,希望进一步加速农业机械化。
2 图像识别
在图像识别方面,采用摄像头+opencv进行杂草识别。
摄像头的工作原理大致为:景物通过镜头(LENS)生成的光学图像投射到图像传感器表面上﹐然后转为电信号﹐经过A/D(模数转换)转换后变为数字图像信号,再送到数字信号处理芯片(DSP)中加工处理,再通过串口等通讯工具,则可以通过显示器显示图像了。
而opencv的作用是处理图像,这里使用树莓派运行opencv,首先预处理,对得到的图片进行预处理,将复杂的图像变成色彩块,然后色彩提取,有了色彩块,便可以对目标的顏色进行提取,进而消除大部分背景;降噪,对于提取的前景需要去除一些噪声点、块,以方便之后的识别;建模,对你的前景进行建模,建模的方式有很多中;匹配,用你的目标和你提取的杂草模型进行匹配。
3传感器
为了保证机器人能在垄间稳定的运动垄间稳定的运动,而不会因为错误的行驶而误伤杂草。采用超声波传感器来进行距离的测定与限制。超声波测距的原理是由超声波传感器的发射探头发射超声波,当超声波遇到障碍物后,会被反射,利用单片机记录超声波发射的时间和接收到回波的时间,根据超声波的传播速度,即可通过公式S=C*[T/2](S为被测距离,C为空气中声速,T为回波时间,T=T1+T2)计算出超声波传播的距离,从而就得到了障碍物离测试系统的距离。测距原理如图1所示:
4拔草装置
拔草装置由四个舵机和一个机械爪组成(如图2所示)。舵机是一种带有输出轴的小装置,当我们向伺服器发送一个控制信号时,输出轴就可以转到特定位置,只要控制信号不变,其角度就不会变。:它由直流电机、减速齿轮组、传感器和控制电路组成的一套自动控制系统。通过发送信号,指定输出轴旋转角度。与普通直流电机的区别主要在,直流电机是一圈圈转动的,舵机只能在一定角度内转动,不能一圈圈转。普通直流电机无法反馈转动的角度信息,而舵机可以。正因此在确定了杂草的位置后,可以准确的拔除杂草。
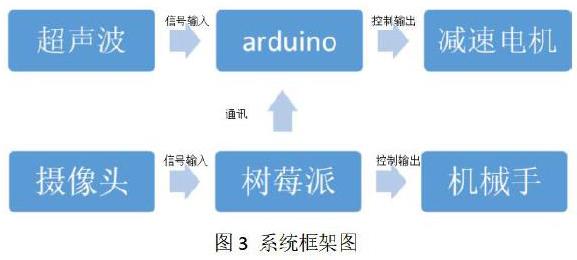
5机器人系统总体框架
系统的框架如图3所示,超声波检测垄的距离,然后告知arduino,接下来arduino根据超声波信息,控制减速电机转动以避免,伤到庄稼。同时摄像头试试检测杂草,并由树莓派进行图像处理,检测到杂草后,告知arduino停止行走,同时控制机械手去拔除杂草。
6总结
小型拔草机器人,在一定程度上丰富了农业机械化,自动化。此机器人设计包含机械,电路,算法三个模块,虽然需要大量基础知识,此设计的大部分装置已经模块化,通过适当学习便可掌握。此机器人功能相对丰度,不仅可以用于拔出杂草,对于垃圾分类里等涉及到识别抓取的功能也可实现。
参考文献:
[1][M]严洪穰、末进、陈敏贤.超声波测距在智能机器人中的开发与应用、机电一体化,2000.
[2][M]东勇.除草机器人机械臂运动分析与控制[].农业机械学报,2007 ( 8 ) .
[3][M]郭伟斌.除草机器人机械臂的逆向求解与控制[J].农业工程学报,2009 ( 4) .
猜你喜欢
自动化学报(2019年6期)2019-07-23
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
科教导刊(2016年27期)2016-11-15
农机使用与维修(2016年10期)2016-11-10
现代电子技术(2015年18期)2015-09-16
舰船科学技术(2015年8期)2015-02-27
