
基于三维激光雷达技术的电力巡线方法研究
2020-12-25 03:16萧振辉刘余敏
微型电脑应用 2020年12期
萧振辉, 刘余敏
(广州供电局有限公司, 广东 广州 510000)
0 引言
随着工业用电和民用用电量的增加,我国电力设施建设随之增加。我国高压输电线不断应用到远距离电力输送中,这种高压输电线对我国电力资源的输送具有重要意义。但是输电线长期暴露在大气环境中,会产生一定的质量问题,因此需要定期检查电力线路,以及时发现电力线路中存在的问题,减少电路问题带来的经济损失。传统的电力巡线方法一般采用人工测绘[1-2],已经不适用目前的巡线工作。为解决目前电力巡线上的问题,提出一种基于三维激光雷达技术的电力巡线方法,为工业和民用电等用电提供保障。
三维激光雷达技术是一种利用激光测距原理和航空摄影测量原理,快速获取大面积地球表面三维数据的技术。根据从发射目标反射回来的信号与发射信号比较,在处理后,就可以获得目标的相关信息,如目标距离、位置、高度等,从而对物体探测,具有作业速度快、工作量小、获取数据量大等特点。同时,可快速生成数字高程模型、数字表面模型和数字正射影像等,因此将其应用到电力巡线检测中,具有重要意义。
此次设计方法首先计算三维激光雷达到目标物的距离,对电力线点云的连通成分分析,获取电力线激光雷达点云数据,然后对点云数据处理,根据准确的坐标信息完成对电力的巡线。实验对比结果表明,此次设计的基于三维激光雷达技术的电力巡线方法比传统的巡线方法效率高。
1 基于三维激光雷达技术的电力巡线方法设计
1.1 电力线激光雷达点云数据获取
对电力线激光雷达点云数据获取的目的是将同一电力线的激光雷达点聚为一类,将不同电力线的激光雷达点聚为不同类,从而减少巡线时间,以提高电力巡线的效率。
基于三维激光雷达技术的电力巡线过程,如图1所示。

图1 三维激光雷达测量过程
由于三维激光雷达技术原理是经激光发射器发射激光脉冲至目标物[3],在这一过程中,三维激光雷达高度以及扫描的角度和方向存在差异,因此首先对三维激光雷达到目标物的距离计算,如式(1)。
(1)
式中,i为震荡器频率,g为脉冲个数,c为三维激光雷达光速,n为被测目标。通过上述公式,得到三维激光雷达到达目标物的位置信息,在此基础上,借助K-N树[4]实现电力线点云的连通成分分析,具体步骤如下。
Step1:将待处理的激光点集的电力线路标号状态设置为未标号,将未标号的点集放至统一队列,同时建立点集的空间索引,设置点集起点标号为O;
Step2:在点集队列中,顺次查找未标号的点,若未标号的点为空,则结束标号过程,如果标号点不为空,将点集队列中未标号的点重建压入新的队列,记为种子点队列;
Step3:以种子点队列中的第一个未标号的点记为种子点[5],借助K-N树查找该种子点的临近点,将临近点中所有未标号的点存入该队列;
Step4:查看种子点队列中未标号点的数量,如果数量不为0,则回到step3步骤,如果未标号数量为0,进入下一步骤;
Step5:将种子点队列中的所有雷达[6]点标记为Ldjgn,并清空种子点队列。
通过上述过程获取到电力线激光雷达点云数据,根据该数据查看电力线情况,为电力巡线提供基础依据。
1.2 基于三维激光雷达技术的电力巡线实现
在上述电力线激光雷达点云数据获取的基础上,对电力巡线,由于获得的点云数据存在差异和坐标等问题,所以先对雷达点云数据处理,再对电力巡线,具体过程如下。
第一,对三维激光雷达精度校检,对获得的测量数据进行差分解算,以测量出准确的电力信息。由于三维激光雷达在电力巡线[7]过程中会受到多种误差影响,因此对三维激光雷达进行精度校检,首先计算三维激光雷达单机自身参数的影响,如式(2)。
(2)
式中,S代表点云密度,w代表扫描半径,p为角分辨率,θ代表扫描半角。通过上述公式,调节单机自身参数,减少单机自身参数对电力巡线的影响,以获得准确的测量结果。
第二,确定雷达目标位置,处理差分后的雷达位置信息,将航迹与姿态进行组合解算[8],得到精确的位置信息。由于三维激光雷达系统获取的点云数据不具备坐标和空间信息,需要对点云数据处理获得激光点的三维坐标值,对点云数据处理的流程图,如图2所示。
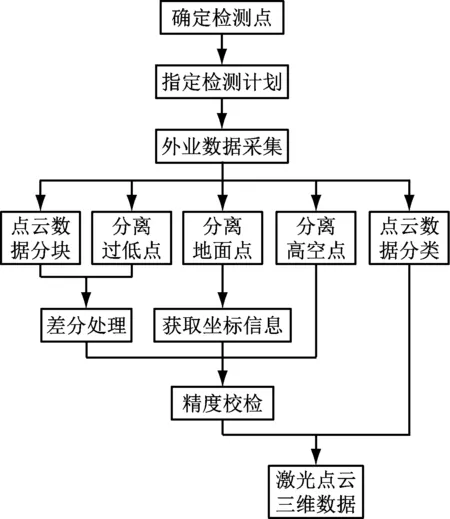
图2 点云数据处理流程图
第三,激光点云数据生成,经过上述处理,获得测点的三维坐标信息,由于原点云数据生成激光点云数据较为复杂,因此对坐标系进行转换。假设激光发射瞬间测得的扫描距离为Q,则激光脚点[9]在瞬时扫描坐标系的坐标,如式(3)。
(3)
式中,RSL为扫描坐标系到参考坐标系[10]的转换因子,Xq、Yq、Zq分别为瞬时扫描坐标位置,a、b、q分别代表相应坐标点的扫描距离。通过上述计算,完成坐标系的转换,然后根据基于三维激光雷达的点云数据,在下一步对电力线路进行加密滤波和分类。
第四,对电路分档[11],确定每一个电力线路档的三维空间范围,由于三维激光雷达获取的每一个电力线路的连通成分可能包含同一电力线多档的激光雷达点,因此将该连通成分以电力线路档分为相应的差分单元,如式(4)。
(4)
式中,m代表电力线路档,RT为激光雷达点端点坐标,lbcx代表单元拆分因子,z代表检测档与档之间的拐点。
在此基础上,采用分层随机抽样的方法对电力线路的单档电力线进行点云聚类[12],如式(5)。
(5)
式中,B为分层随机抽样因子,u代表电力线划分因子,ya为电力线路测量值。
通过上述计算,将每一个电力导线的点数据划分到相应的根中,获得准确的电力线路信息。同时为进行可视化的巡线,构建交互环境,真实反应电力线路现状,满足电力应用需求。同时,建立空间数据库,将获得的电力线路信息与其对应的属性集成并存储于空间数据库中,同时该数据库中提供线路查询与分析功能,电力巡线提供可靠基础,以此完成基于三维激光雷达技术的电力巡线。
2 实验论证
2.1 实验方案设计
为验证上述设计的基于三维激光雷达技术的电力巡线方法的有效性,进行实验论证。同时,为使实验更具说明性,将传统的电力巡线方法与此次设计方法对比,评价两种方法的电力巡线效率,效率评价采用时间开销作为指标。实验数据由Opsdf机载激光测量仪获取,两种方法使用相同实验数据,实验平台配置包括:ThinkPadW520笔记本,CPU为2.4 GHz,处理器内存4 GB,操作系统为Windows XP系统,测试服务器选用Intel Pentium X2,并利用SHDUFI仿真软件模拟电力线路环境。此次实验环境,如图3所示。

图3 实验环境
在实验平台中,设置Dfiyo、Fxfgn、Xfhgj三条电线,这三条电线中故障点数不同,分别对比两种电力巡线方法检查这三条故障电线的时间。
2.2 实验结果分析
2.2.1 电力巡线时长对比
此次设计的基于三维激光雷达技术的电力巡线方法与传统的电力巡线方法的故障效率,如表1所示。

表1 实验对比结果
分析上表可知,第一条Dfiyo线路中故障线路较少,传统电力巡线时间与此次设计方法的电力巡线时间相差3.008 min;第二条Fxfgn线路中故障线路点比Fxfgn多,传统电力巡线时间与此次设计方法的电力巡线时间相差5.001 min;第三条Xfhgj线路中故障点最多,传统电力巡线时间与此次设计方法的电力巡线时间相差7.21 min。
对比可知,在故障点较少时,传统方法的巡线时间与此次设计方法的巡线时间相差较小,而随着故障点的增加,传统方法的巡线时间与此次设计方法的巡线时间相差越来越大。综合实验结果得知,在故障点多和少的情况下,此次设计的基于三维激光雷达技术的电力巡线方法效率均高于传统方法的巡线效率。因为此次设计方法参数少,计算复杂程度低,无需人工干预,自适应性强;传统方法需要经过初值求解、模型优化、线路检测等过程,导致电力巡线检测时间过长。因此,通过上述实验可以证明,此次设计的基于三维激光雷达技术的电力巡线方法效率较高,能够及时发现电力线路中存在的问题,具备实际应用意义。
2.2.2 电力巡线的准确性对比
基于三维激光雷达技术的电力巡线方法与传统电力巡线方法的准确率,进行实验对比,如图4所示。

图4 电力巡线准确率对比图
图4表示了经多次迭代后,三维激光雷达技术电力巡线方法和传统的电力巡线方法的准确率对比图。可以看出,每次迭代本文方法的准确率都高于传统方法,随着迭代的次数增多准确率也随之增加。而传统方法的准确率明显低于本文方法,随着迭代次数的增多不但未有明显的改变,还有下降的趋势。因此,通过本次实验可以证明,本文中基于三维激光雷达技术的电力巡线方法准确率较高,在电力巡线的使用中比传统方法具有更大的优势。
3 总结
针对传统的电力巡线方法效率低的情况,设计了一种基于三维激光雷达技术的电力巡线方法,以满足电力巡线需求。此次设计方法首先对电力线激光雷达点云数据获取,在获取点云数据的基础上对其处理,得到准确的电力线路点的坐标信息,根据坐标信息完成对电力信息的查看。实验对比结果表明,此次设计的基于三维激光雷达技术的电力巡线方法比传统巡线方法效率高,更具备应用优势。证明此次设计的电力巡线方法能够降低电力部门的巡线预算、降低劳动强度,减少巡线时间,在短时间内查看电力线路中的问题。
希望此次设计的基于三维激光雷达技术的电力巡线方法为电力巡线提供帮助,为电网发展提供有力的支持。
猜你喜欢
智慧电力(2022年1期)2022-03-02
科技研究·理论版(2021年4期)2021-09-10
无人机(2021年6期)2021-05-26
辽宁大学学报(自然科学版)(2020年2期)2020-12-13
铁路计算机应用(2020年5期)2020-06-02
测绘通报(2019年7期)2019-08-07
武夷学院学报(2019年3期)2019-06-13
源流(2018年6期)2018-12-03
无人机(2018年1期)2018-07-05
湖南师范大学学报·自然科学版(2014年3期)2014-10-24
