
基于Tan-Sun变换的不对称磁信号检测研究
2021-01-18 01:39王海宝庞振江周娴姊谭广军
燕山大学学报 2021年1期
王海宝,王 峥,庞振江,吴 超,高 阳,周娴姊,谭广军
(1.北京智芯微电子科技有限公司,北京102200;2燕山大学 电气工程学院,河北 秦皇岛 066004)
0 引言
Tan-Sun变换方法是一种应用于三相不平衡电力电子系统中的坐标变换方法,其能够将三相不平衡交流量直接变换为2个恒定的直流量,简化了对系统的建模分析与控制器设计[1-2]。基于Tan-Sun变换的同步相量测量技术无须采用滤波环节提取三相不平衡电压的基波正序分量,通过实时地调节Tan-Sun变换矩阵的参数即可快速地检测三相不平衡交流量的幅值、相位和频率等信息。在三相变换器的控制中,通常每相电流通过各自的电流传感器转换为电压信号,进行AD转换或直接送给模拟电路使用[3];而在6~35 kV的中压输配电工程中,三芯电力电缆的应用比例越来越高[4]。三芯电力电缆的A、B、C三相芯线一般两两相隔120°沿该电缆轴向圆周均匀分布,且三相芯线使用共同的屏蔽保护层。三芯电缆在正常工作时,三相电流平衡,利用安培定理可知,电缆外部等效电流为零,即电缆横截面的总磁通量也为零。而传统的基于电流互感器测量电流的方法主要是利用了电磁感应原理,电缆截面没有磁通变化,也就无法感应出电流,因而就无法以电流互感器测量三芯电力电缆各芯线的电流。现有的电力电缆检测大多是通过电缆运行特性的相关参数(例如电缆温度[5-6]、局部放电特性[7]等)间接反映电缆运行状态[8]。间接参数虽然可以一定程度上反映出电缆运行存在的缺陷或预测出可能发生故障的隐患,但是不能实时反应电缆的运行状态,而且对于故障的位置或类型的判断存在局限性。
随着磁测量器件生产工艺和加工水平的提高,可以利用磁测量器件检测电缆外部某点的磁通密度变化,从而获取相应的电流信息,而且这种采用磁测量器件检测电缆电流的方法逐渐受到电力行业的认可[9-10]。鉴于此,文献[11]提出了一种利用三芯对称电力电缆表面周向磁场与电缆各相芯线电流之间关系的数学模型,通过测量三芯对称电力电缆表面周向磁场的变化,可实现三芯对称电力电缆中各相芯线电流的有效测量。而文献[12]提出实施上述方法时,需要保证电缆轴心与磁传感器阵列中心重合,否则就会产生相应的偏心误差,因此提出了一种磁传感器阵列“旋转法”,依据对磁传感器阵列旋转0°和180°两种状态,建立三芯电力电缆各芯线电流、磁传感器阵列中心实际位置以及所测量磁感应强度相互关联的解析模型,以求得位置偏差与相应各相电流。但是该方法在实施时需要对磁传感器阵列进行180°旋转,对磁场进行两次测量,以建立相应的方程组,这不仅带来了操作步骤的增加,在旋转操作和两次测量中也容易引入误差。
针对电力电缆中三相芯线位置非对称所带来的磁场强度不对称情况的测量问题,本文采用了基于Tan-Sun变换的同步相量测量技术,其方法可将三相平衡电流产生的3个不平衡磁感应强度直接变换为具有恒定幅值的dq轴磁感应强度,进而可建立磁感应强度和电流之间的比例关系,从而为三相非对称芯线电缆电流的测量技术提供一种可行的解决方案。
1 三芯电力电缆位置不对称时的磁感应强度模型
三芯非对称电力电缆的结构如图1所示。3个磁传感器以对称的结构安装在电缆表面,如图中SA、SB和SC的位置所示,其到电缆中心的半径距离为R。三相芯线的位置如图中A、B和C的位置所示,由于无法保证其位置的对称性,因此一般地可设A、B和C位置到电缆中心的距离分别为ra、rb和rc,与电缆中心和SA连线的夹角分别为θa、θb和θc。

图1 三芯非对称电力电缆结构Fig.1 Three-core asymmetric power cable structure
根据图1可得,三相芯线位置A、B和C到磁传感器SA位置的距离分别为

(1)

(2)

(3)
ABC三相电流iabc在SA处产生的磁感应强度分别为
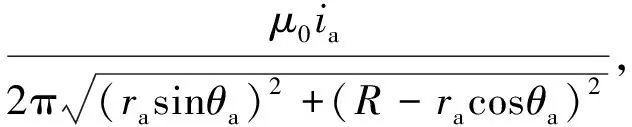
(4)

(5)

(6)
式(4)~(6)所示三相电流在SA处磁感应强度的切线分量分别为

(7)

(8)

(9)
因此SA处切线方向的总磁感应强度为
BAn=BAan+BAbn+BAcn=

(10)
同理可得SB和SC处切线方向的总磁感应强度分别为

(11)

(12)
由式(10)~式(12)可知,由于三相芯线位置的不对称性,即使三相电流是平衡的,3个磁传感器所检测到的磁感应强度之间却是不平衡的。
2 基于Tan-Sun变换的同步相量测量技术
假设三相芯线位置是对称的,当三相电流平衡时,则3个磁传感器所检测到的磁感应强度也是平衡的,且相位与三相电流相位相同,此时就可对所检测到的3个磁感应强度采用与三相电流相同的Clarke和Park变换得到与dq轴电流相对应的dq轴磁感应强度,因此可建立磁感应强度与电流之间的比例关系,从而可根据所检测到的磁感应强度计算得出三相电流的大小。
然而当三相芯线位置不对称时,即使三相电流是平衡的,由于此时由磁传感器所检测到的三个磁感应强度之间是不平衡的,其不仅会存在幅值和相位上的不平衡性,而且还有可能存在零序分量,因此此时若仍对3个磁感应强度采用Clarke和Park变换的话,则所得到的dq轴磁感应强度将不再恒定,其会含有二倍频分量,这样就无法建立磁感应强度与电流之间的比例关系,也就无法通过检测到的磁感应强度计算得出三相电流的大小。
为了解决由于三相芯线位置的不对称性所带来的磁感应强度二倍频分量问题,本文将采用基于Tan-Sun变换的同步相量测量技术,将3个磁感应强度作为此方法的输入信号,经过坐标变换之后可直接得到恒定的dq轴磁感应强度,因此可建立其与dq轴电流的比例关系,从而可根据所检测到的磁感应强度计算得出三相电流的大小。
假设三相平衡电流产生的3个不平衡磁感应强度BAn、BBn和BCn,对应于式(10)~(12),是含有零序分量的,则总可以经过如下环节将其零序分量消掉
(BAn+BBn+BCn),
(13)


(14)
式中,Bnm为BAn、BBn、BCn平均意义下的幅值,φba表示B相与A相的磁感应强度相位差,φca表示C相与A相的磁感应强度相位差。
基于式(14)定向的Tan-Sun坐标变换矩阵为

(15)
若Park变换矩阵TPark基于磁感应强度BAn定向,则可表示为

(16)
根据式(14)~(16)可得

(17)
式中,Bdn能够反映并检测出BABCn的幅值信息,Bqn为鉴相器的误差。当TTan-Sun和TPark中的各参数并不是其真实值,而只是其估算值时,则有

(18)

(19)

(20)
式中,Δθa、Δφba和Δφca分别为所对应参数的估算误差,并记Δp=[ΔθaΔφbaΔφca]T。根据式(17)~式(19)可得鉴相器误差Bqn为

(21)
式(21)为关于各参数估算值的三角函数表达式,为了能够将调节误差Bqn表示为与各参数的估算误差呈线性的关系,可对式(21)在各参数的估算误差为零处进行Taylor级数展开可得

(22)
本文将设计一种能够消除各参数估算误差间耦合关系的同步相量测量技术,其能够在某个参数存在估算误差时,只需对其所对应的参数估算值进行调节,而对其他参数估算值控制律的影响几乎为零,这也就是说,某个参数估算值的控制律只与其本身的参数估算误差有关,而与其他参数估算误差无关,从而实现了对各参数估算误差之间的解耦,因此能够提高对同步相量测量的动态响应速度。
在实空间L2[0, 2π]上,f(x),g(x)∈L2[0, 2π],若定义内积公式为

(23)
则函数系

(24)
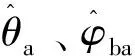
为L2[0, 2π]中的一个规范正交系。若仅考虑式(24)所示函数系中的前3个元素,则由其所构建的Hilbert空间的规范正交系与Euclidean空间的空间直角坐标系之间存在一定的对应关系。因此对于只含有3个元素的Hilbert空间规范坐标系,其各元素可分别对应于三维Euclidean空间的3个单位向量i、j和k。基于此,若令x=2θa,则式(22)所示Bqn可表示为如下向量形式

(25)
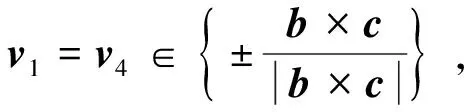
式中,a、b和c分别为Bqn中关于Δp的3个向量系数,其不仅有大小,而且还有方向。各参数估算值的控制律可写为如下两向量数量积的形式

(26)

(27)

(28)

(29)
式中,k1~k4均大于零。为了消除各参数估算误差之间的耦合关系,实现对各参数估算值的解耦控制,v1和v4应分别与b和c垂直,v2应分别与c和a垂直,v3应分别与a和b垂直,只有这样,其与Bqn的数量积结果中才会消除另外2个参数估算误差项。此外,为使得v1~v4为单位向量,v1~v4应分别为
(30)

(31)

(32)
式中,符号的选取应保证各控制律是稳定的,即各控制律等号右侧的参数估算误差系数小于零。为满足上述稳定性条件,经计算可得

(33)
v2=jsinφba+kcosφba,
(34)
v3=-jsinφca-kcosφca。
(35)
因此,各控制律可表示为如下两向量数量积的形式

(36)

(37)

(38)

(39)


(40)

(41)

(42)

(43)
式中
Bdn=BAncos(θa+φba+φca)+
BBncos(θa-φba+φca)+
BCncos(θa+φba-φca)。
为了简化控制律算法,而非一定要求各参数估算值的控制律均具有相同的调节时间,控制系数k3和k4的取值可按照3个磁感应强度平衡的情况进行选取,此时则有
。
(44)
若将Euclidean空间的向量v1~v4采用Hilbert空间的规范正交系式(24)进行表示,则式(36)~(39)所示控制律可写为

(45)

(46)

(47)

(48)

基于上述分析和设计过程,当3个磁感应强度不平衡时,本文所提出的基于Tan-Sun变换的同步相量测量方法结构如图2所示。

图2 基于Tan-Sun变换的同步相量测量方法结构框图Fig.2 Block diagram of synchronous phasor measurement method based on Tan-Sun transform
图2中,当此系统稳定时,d轴磁感应强度Bdn即为恒定值,由式(17)可知,当φba和φca为定值时,其与3个磁感应强度的通用幅值Bnm有固定的比例关系。而根据式(10)~(12)可知,当三相电流平衡时,即ia=Imcos(ωt+φ)、ib=Imcos(ωt-2π/3+φ)、ic=Imcos(ωt+2π/3+φ)时,代入式中可得BAn、BBn、BCn的幅值与Im是成固定比例关系的,同时根据式(14)可知,BAn、BBn、BCn的幅值与Bnm也是成固定比例关系的,因此,Bnm和三相电流的幅值Im之间也存在固定的比例关系。当图2所示的同步相量测量方法达到稳态时,其Bdn与Im之间也存在一定的比例关系,因此可直接根据Bdn的测量值确定三相电流的大小。
3 系统实现
实验室所搭建的实验平台采用TI公司的数字信号控制器TMS320F28335作为主控芯片,采用3个Phidgets公司型号为1108_0的磁传感器测量三芯电缆的磁感应强度,所测量到的磁感应强度经低通滤波处理后由三路数模转换即最终得到了3个磁感应强度的实际数据,然后进一步进行数据处理。
对于某一特定的三芯非对称电力电缆,当三相电流平衡时,其3个磁感应强度之间的幅值比和相位差是固定的,只有各磁感应强度的绝对幅值和频率是可变的。因此本节首先对磁感应强度为稳态值时对其方法进行仿真验证,并考察当3个磁感应强度的幅值同比例变化以及频率发生变化这两种暂态的动态性能。
电网频率ω=100π rad/s,调节时间ts=22 ms。当处于稳态时,其仿真波形如图3所示。图3(b)中,d轴磁感应强度Bdn为恒定值,其与SA处所测得的磁感应强度幅值BAnm的比值约为1.283 9。从图3(c)中可看出,频率响应波形稳定在50 Hz处。

图3 稳态仿真波形Fig.3 Steady state simulation waveforms
当设置BAnm在0.5 s时刻由0.5 mT突变为0.6 mT时,其仿真波形如图4所示。从图4(c)中可看出,频率响应波形稳定在50 Hz处。图4(b)中,当BAnm突变后,d轴磁感应强度Bdn也会随之突然增大,但在幅值变化前后,其二者之间的比值维持不变,均约等于1.283 9,而BAnm又与Im成比例关系,从而说明Bdn与Im也成比例关系。若事先在某个稳态条件下能够测量得到Bdn与Im之间的比值kB-I,则当电流大小发生变化时,可将所测得的d轴磁感应强度Bdn代入到公式Im=Bdn/kB-I中可求得三相电流的幅值大小。

图4 磁感应强度幅值突变时的仿真波形Fig.4 Simulation waveform of a sudden change ofmagnitude of the magnetic induction intensity
当通过交流可编程电源设置频率f由50 Hz突变为48 Hz时,其仿真波形如图5所示。从图5(b)中可看出,当频率突变时,Bdn存在一小幅波动,并经过35 ms恢复到原来的稳定状态。图5(c)中,频率的响应波形经过20 ms至新的稳定状态,从而验证了本文所设计的同步相量测量方法对于频率扰动具有良好的动态响应性能。图6给出了通过计算得到的三相电流稳态波形。

图5 频率突变时的仿真波形Fig.5 Simulation waveforms of a sudden change of frequency
4 结论


图6 计算得出的三相电流Fig.6 Evaluated three-phase current waveforms
猜你喜欢
传感器世界(2022年6期)2022-11-25
电工技术学报(2022年20期)2022-10-29
电工技术学报(2022年20期)2022-10-29
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
防爆电机(2022年3期)2022-06-17
飞控与探测(2022年2期)2022-06-11
防爆电机(2022年1期)2022-02-16
水下无人系统学报(2021年6期)2022-01-15
电机与控制学报(2018年9期)2018-05-14
中学生数理化·高二版(2016年12期)2017-02-28
