
三维激光扫描技术在海岛边坡监测中的应用
2021-01-20 04:03刘辉
经纬天地 2020年6期
刘 辉
(辽宁省自然资源事务服务中心—辽宁省基础测绘院,辽宁 锦州 121003)
0.引言
海岛地质灾害是指岛屿陆地和海岸的地质现象和地质过程,对岛屿的自然生态环境和地形造成严重破坏,或者造成海岛人民的生命财产损失,这将直接或间接影响该岛的经济和社会发展[1]。海岛边坡发生滑坡和泥石流属于常见的地质灾害,因此,持续对海岛的边坡进行监测十分必要。
海岛的边坡监测主要是定期测量边坡平面和垂直方向的位移变化,判断和分析边坡是否变形,以及变形的区域、大小、方向和类型,进而得出结论。传统的监测的方法是利用全站仪和GPS对点特征进行测量,基于遥感、摄影测量和三维激光扫描技术获取变形数据具有精度高、速度快、节省人力物力等优势,是海岛边坡监测的主要发展方向,并且已取得了较多的研究成果。胡颖等[2]提出了将地面三维扫描技术用于监测地表形变产生的滑坡灾害的方法。蒋健等[3]提出了一种分布式GNSS地质灾害实时监测方案,通过卫星差分定位技术实现地质灾害数据的全自动实时采集,实现了地质灾害的可视化监测和管理。张国龙等[4]以郑州市西北某一滑坡监测为例,介绍了对三维激光扫描获得的数据进行滑坡变形分析的方法,得到滑坡体变形的点、线、面的滑坡变化信息,验证了该方法在滑坡监测中应用的可行性。
1.三维激光扫描技术原理
1.1 三维激光扫描技术简介
近些年来,三维激光扫描技术作为一种测量的新型技术得到了快速发展。它通过向对象物体发射高速激光,获得被射物体的表面的各类数据,进而得到点云数据。利用三维激光扫描技术配套的软件计算并处理点云数据,进而构建出物体的三维模型及相关数据[5]。三维激光扫描技术可以快速获得物体的表面特征,避免了传统的“以点代面”测量方法的缺点,还具有操作简单、自动化程度高、数据精度可靠、受外部条件的限制较小的优点,并且所获得的数据可以更直观地反映物体的表面信息。
1.2 三维激光扫描仪工作原理
3D激光扫描系统主要由3D激光扫描仪、计算机、电源系统、支架和系统支持软件组成。根据扫描原理,常用的三维激光扫描技术可分为三类:相位测距法、脉冲相位测距法和激光测距法。测距原理如下:
1.2.1 脉冲测距方法
脉冲测距法是一种将激光时间测量与距离测量相结合的测量技术。脉冲测距方法适用于超长距离3D激光测量,测量精度可以达到厘米级。最常用的仪器是奥地利Rigel激光雷达仪器和瑞士的Leica激光雷达仪器。
1.2.2 激光三角测距法
激光三角测距的原理是通过激光传输系统发送激光到目标物体的表面,而CCD摄像机接收目标物体反射的信息。根据记录的入射光与反射光之间的角度和三角形的几何关系计算目标对象在坐标系中的位置。这种激光雷达测量技术在几十米范围内的测量精度能够达到亚毫米级,它主要用于逆向工程的模型重建和工业测量。
1.2.3 相位测距法
相位测距法是通过光波的相位差计算距离。使用相位测距法的仪器通常用于短距离或中距离的观测设备,相位测距法的测量精度高,毫米级的观测精度能够广泛应用于工业领域等精度要求高的测量需求。
1.2.4 脉冲—相位测距法
将脉冲测距与相位测距方法结合在一起,就形成了脉冲—相位测距法。它通过有效地结合两种测距方法,可以获得高精度的位置信息。
1.3 三维激光扫描测量误差分析
三维扫描仪有三个误差来源:线性误差(激光雷达部分/LARA)、测距噪声(激光雷达部分/LARA)和测角误差(机械偏转部分)。
1.3.1 线性误差
线性误差是在测量时做了距离校准后出现的小误差。对比不同距离下的采样均值与真实距离,得到了不同距离下的测距残留误差。
1.3.2 测距噪声
距离测量时采样的数值与其平均数值之间的差值为距离噪声,它呈高斯正态分布。测距噪声是任何点云数据里都有的,该误差受测量时数据采集速度的影响较大,因此,测量时仪器与测量物体之间的距离、被测物体表面的反射率等都是影响测距噪声大小的重要因素,控制好这几种影响因素能够有效减小测距噪声的值。
1.3.3 机械偏转系统
激光束的发射角度是根据反射镜的角度来测量的,激光束真实的发射角度与反射镜的实际角度并不是完全一样。测角误差又包括水平测角误差Eβ与竖直测角误差Eα。为了得到由扫描仪机械偏转系统带来的测角误差,需要对测量仪器建立校准场,在校准场内对扫描仪进行校正,通过计算目标地物的测量值与真实值之间的差值,即得到这台扫描仪机械偏转系统的测角误差。有了这些测角误差就会相应生成一些实时改正参数。角度误差在距离较远时对点云的三维误差影响很大。
基于以上分析,测角误差是一个重要参数。但是角度分辨率是机器能识别的最小角度,和测角精度没有关系。
2.海岛边坡测量试验
2.1 试验区概况
试验区位于辽宁东部长山群岛,地处长山群岛的中心位置。陆地面积31.79平方公里,海岸线长94.4公里,海域面积651.5平方公里,沿海分布有海蚀阶地和冲积平原。地形破碎,河流短促,河谷狭窄。植被类型为暖温带落叶阔叶林,属于华北植物区系,植被以油松、赤松为主。土壤类型主要为棕壤、草甸土、草甸沼泽土、少量风积沙土和潮坪盐土。
由于组成海岛边坡的岩体多为石英岩、碎石等不稳定材质,因此,易产生危岩崩塌坠落等灾害,此处之前曾发生过落石等情况,目前已采取防护网加固的方式来降低灾害发生的风险。
2.2 监测实施
利用三维激光扫描仪测量边坡的变形数据采用以下技术流程(如图1所示):

图1 边坡变形测量技术流程
2.2.1 软硬件投入
2.2.2 点位布设
技术人员前往现场调查、验证和确认扫描对象周围的控制点,并在扫描过程中检查控制点的可用性,标记并保存可用的控制点。根据扫描目标的形状、位置、空间分布、精度要求和扫描分辨率来确定测站和目标的位置。本次试验利用岛上已有的平面控制点和高程控制点与提前埋设的控制点进行联测。
沿着监测边坡下的道路,通过导线与水准路线布测工作基点,沿着堤岸与道路之间布测工作基点,选择斜坡上的自然特征点作为变形观测点。布设点位时,尽量选在位置牢固,便于观测,并能反映监测体或监测断面两侧变形特征的位置。为了方便后续的扫描仪进行扫描作业,监测点还应兼具三维激光扫描标记点的功能。在选择点位时,还必须考虑在两个站点的扫描范围内需要三个或更多的标记点。
2.2.3数据采集
将三维激光扫描仪在选定的工作基点上对海岛边坡进行扫描,并将选定的监视点作为特征点。然后,根据预先制定的扫描方案,在测站上架设三脚架并安装设备。在确认作业范围内无遮挡后开始扫描,设备会对选定的区域进行扫描和数据获取。扫描结束后,将扫描仪存储卡中的观测数据导出。
2.2.4 数据处理与分析
2.2.4.1 点云数据预处理
通过扫描获得的点云数据并是初级结果,其数据量巨大、点位分布散乱且密度大,因此,无法直接使用。通过对点云数据进行简单预处理即可解决这些问题,预处理的主要环节包括:降噪、数据精简、规则化等,为下一步进行三维建模做准备(如图2所示):
当1≥e1>e2>0时,对任意的p1,定理4结合定理1,有q*(e1,p1)>q*(e2,p1),如图6所示。

图2 点云数据的预处理
人们经常使用的数据平滑算法包括三种:高斯滤波法、邻域平均法和中值滤波法。由于去噪过程中的权重是高斯分布,高斯滤波能够完全消除点云中的噪声,并完整地保留特征信息,因此,高斯滤波可以去除高频信号,该算法在三种算法中效果最好。在具有特征点的点云滤波中,均值方法效果更好,但在其他场景中效果一般。中值滤波方法仅对特殊的点云噪声(如点云中的噪声呈毛刺状)处理效果较好。因此,本文采用高斯滤波算法对点云数据进行去噪处理。
2.2.4.2 点云数据的拼接配准。首先要将几次扫描获得的数据做拼接,才能获取被测物体表面的完整信息。将单次扫描的数据分别匹配到参考数据上,最终将观测目标的完整信息统一到同一坐标系下。
在扫描数据和参考数据上分别选取至少三对同名点,然后将待配准的扫描数据纠正到参考点云数据上。在配准时,需要不断调整选取的同名点,已达到最佳的配准精度。本试验区点云数据的拼接效果(如图3所示):

图3 拼接后的点云数据
2.2.5 数据处理
在做完数据预处理后进行下一步的建模处理。建模的首要内容是数学算法的选择,算法的合适与否将决定模型的精度和数据表达的正确性。通过数据之间的拓扑关系拟合离散点,从而建立了接近真实形状的模型。
2.2.6 模型输出与评价
利用软件将不同算法得到的建模结果进行比较和分析,统计模型的精度,进而验证从构建模型的准确性。构建的点云模型(如图4所示):

图4 点云模型
2.2.7 多期监测结果对比分析
利用三维激光扫描仪对监测的海岛边坡进行持续测量,通过对比同一点位的数据差异得出该点位的位移量。根据规范中关于滑坡监测的精度要求,对于试验区这种岩质滑坡,当水平位移监测点位的中误差大于6毫米、垂直位移监测的高程中误差大于3毫米或地表裂缝的观测中误差大于0.5毫米时,则认为观测点位发生了变形。各期扫描结果与第一期比监测点变化量(如表1、表2所示)。对比五期监测数据,得到后四期与第一期的监测点位变化幅度小,点位稳定,所测边坡整体稳定的结论。由于同期数据都是在同一天先后测得的,因此外界环境的影响可忽略不计。
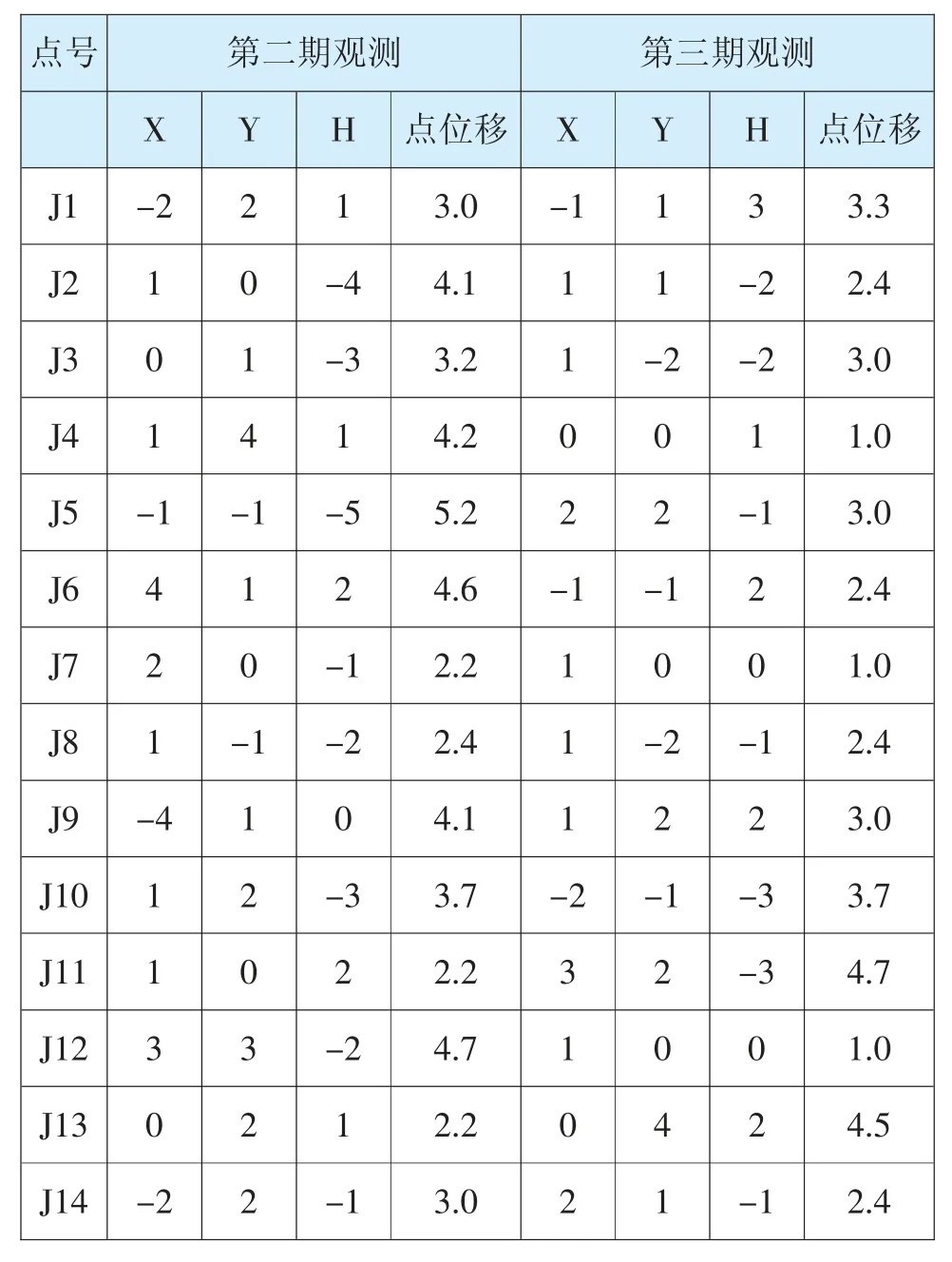
表1 第二、三期扫描结果与第一期比监测点变化量

表2 第四、五期扫描结果与第一期比监测点变化量
3.结束语
三维激光扫描技术使用激光扫描仪发射并接收激光扫描扫描束,能够快速、高效地得到扫描对象海量的点云信息,进而得到坐标和其他空间信息。然后,通过对海量、密集的点云数据能够快速构建出三维点云模型,为数据分析等工作提供准确的数据依据。本文通过对辽宁东部海岛边坡进行五期三维激光数据获取和变形监测数据处理的试验,总结出利用三维激光扫描技术进行物体变形测量的技术方法。通过定期复测的方式获得监测对象的三维信息,对比特征点位的水平、垂直等度量的变化,进而分析出监测对象的变形情况。随着三维激光扫描技术的不断成熟和发展,它已逐渐成为空间数据采集的重要手段,该技术将在工程建设规划、物体三维重建与监测等领域发挥重要作用。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
科学(2020年3期)2020-01-06
模具制造(2019年3期)2019-06-06
航天电子对抗(2018年3期)2018-07-14
航天电子对抗(2018年6期)2018-03-04
电子制作(2017年7期)2017-06-05
现代营销·经营版(2015年3期)2015-04-20
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10
雷达学报(2014年4期)2014-04-23
