结合变化向量分析和直觉模糊聚类的遥感影像变化检测方法
2021-01-21 02:39季欣然黄亮陈朋弟
全球定位系统 2020年6期
季欣然,黄亮,2,陈朋弟
(1.昆明理工大学 国土资源工程学院,昆明 650093;2. 云南省高校高原山区空间信息测绘技术应用工程研究中心,昆明 650093)
0 引 言
人类活动和自然界地表生态演变给全球地表覆盖带来了极大变化,实时准确地获取这些变化信息对研究社会发展现状、管理自然资源以及人与自然之间的交互作用有着重要意义[1-4]. 但如何高效实时地监测这些动态变化信息、精确分析这些动态变化的特点及原因,成为了资源环境管理保护部门急切需要解决的重点问题之一. 遥感影像变化检测技术就是对这些动态变化信息进行监测、获取、分析以及研究的一种非常有效的办法[5]. 但数据(数据源、传感器等)的不确定性、方法的普适性、变化检测过程及成果的可靠性、变化结果标记的科学性等关键技术尚未得到有效解决[6],数据获取和处理的过程中存在的不确定性问题为变化检测结果带来了较大影响.
目前围绕遥感影像变化检测的不确定性问题主要有两种解决方法:1)基于统计分析的变化检测方法;2)基于模糊数学理论的变化检测方法[7]. 近年来,基于模糊数学的遥感影像变化检测方法已成为了该领域研究热点,对解决传统方法中存在的不确定性问题有很好的成效. 如,赵磊等[8]在遥感影像变化检测非监督方法研究中融合了邻域分析和模糊C均值聚类算法(FCM);Wu C等[9]将FCM应用于核空间同时与非采样轮廓变换相结合完成了遥感影像变化检测;Ma W等[10]在FCM算法的基础上进行改进,提出了粗糙模糊C均值聚类算法(RFCM)并将其用于遥感影像变化检测; Yan W D等[11]结合频差理论对FCM进行改进,并将其用于SAR图像的无监督变化检测; 王建明等[12]结合自适应距离以及模糊拓扑优化对模糊聚类变化检测方法展开了研究; 王峰萍等[13]运用离散小波变换融合差异图像结合邻域FCM解决了变化检测的误分类问题;刘陆洋等[14]将双差异图、主成分分析(PCA)和FCM相结合,以减少噪声对SAR图像变化检测分类结果的影响;张岭军等[15]通过引入空间领域信息对传统的模糊聚类算法进行改进,用于SAR图像的变化检测.
以FCM为代表的模糊聚类方法只有一个隶属度,而直觉模糊聚类则具有直觉指数、隶属度和非隶属度,可以更好地解决变化检测中存在的不确定性问题[16-17]. 为此,本文引入直觉模糊C均值聚类算法(IFCM)聚类算法,提出了结合CVA和IFCM的多时相遥感影像变化检测方法(CVA-IFCM).
1 研究方法
假定X1和X2分别为t1、t2两个时刻获取的同一区域大小均为M×N像素、具有相同空间分辨率的两景高空间分辨率遥感影像,数据经严格几何配准. 假定X1={xij(t1),1≤i≤M,1≤j≤N}和X2={xij(t2),1≤i≤M,1≤j≤N},xij(t1)和xij(t2)分别表示两幅影像数据中第i行、第j列像元的灰度值. CVA-IFCM法的步骤包括:1)采用CVA构造差异影像;2)基于IFCM的变化区域提取;3)变化检测精度评价,具体流程图如图1所示.

图1 变化检测流程图
1.1 变化向量分析(CVA)
CVA是一种常用的多波段遥感影像变化检测的方法,主要从影像信息的变化强度和变化方向两个角度进行变化检测,有效解决了差值法比值法只能用于处理单波段影像这一弊端,增强变化区域特征信息的同时有效抑制背景信息带来的干扰[18].
CVA是将t1、t2不同时刻的遥感影像数据中相应位置的灰度值进行差值运算来构造新的差值图像,这些图像表示了t1、t2不同时刻的遥感影像发生的变化. 差值图像中的各位置处的像元灰度值即为变化矢量,其表达式为
(1)

CVA变化强度图像的灰度值由欧氏距离运算得到,表达式如下:

(2)
式中,DX表示像元的变化强度,通过设定阈值判断是否发生变化,像元变化强度在阈值范围内则认为未发生变化,超出该范围则认为发生变化[20].
1.2 直觉模糊C均值聚类算法(IFCM)
1.2.1 算法原理
假定影像像元灰度值的聚类中心为vs(s=1,…,c). 输入由CVA获取的灰度图像,用IFCM算法输出像元灰度值对某个聚类中心的模糊隶属度μs,ij,表示灰度图像中第i行、第j列像素点的灰度值xij(xij∈[0,255])属于第s个灰度中心的概率,可以通过求取目标函数的最小值得到.
IFCM目标函数

(3)


(4)
式中:πs,ij代表某个聚类中心中样本数据的直觉指数,表示影像数据中第i行、第j列像元的灰度值xij对第s个类的犹豫程度;M×N代表像元灰度值的总数.
隶属度更新公式
(5)

空间函数

(6)
针对相邻像素具有相似的特征强度易被归为同一类这一问题,引入空间函数hs,ij,表示像元灰度值xij在第s个聚类中的可能性程度;μs,l表示xij的领域像素NB(xij)对第s个聚类中心的模糊隶属度,当xij大多数领域像素属于同一聚类时,则该像素的空间函数值较高.
FCM算法利用模糊隶属关系实现对样本数据的分类[21],IFCM是将直觉模糊集运用到FCM算法中得来[22].
直觉模糊隶属度公式

(7)
模糊隶属度公式

(8)
式(8)中,vk代表第k个聚类中心.
直觉指数公式
πs,ij=1-μs,ij-γs,ij,0≤πs,ij≤1.
(9)
式(9)中,γs,ij代表数据对某个聚类中心的非隶属度,表示像元灰度值xij不属于第s个类的程度.
非隶属度公式

(10)
0≤μs,ij+γs,ij≤1.
(11)
聚类中心更新公式

(12)
隶属度差值

(13)

1.2.2 算法流程
本文旨在将CVA构造的差异影像分为变化和未变化两类,因此对IFCM算法的具体步骤和参数进行了特定设置,具体如下:
1)明确算法的初始化迭代条件,设置所需参数:模糊指数m=2、目标函数精度e、初始隶属度相对权重p=1、空间函数相对权重q=3、算法最大迭代次数100和终止误差0.05. 设计一个准则函数,选取2个初始聚类中心;
2)加入不确定度参数,将原有的隶属度矩阵化为模糊隶属度矩阵;
3)使用替换后的模糊隶属度矩阵计算各样本到不同聚类中心的距离,以获取各样本的模糊隶属度,按隶属度划分样本数据、分配所属类;
4)再次计算各样本到聚类中心的距离以及各个类的聚类中心,使用直觉模糊隶属度矩阵代替隶属度矩阵;
5)将各样本重新划分至相应的类中;
6)重复1)、3)和4),直至初始定义的准则函数达到最小值或指定阈值;
7)对图像中各像素点进行灰度值分类,将迭代后的聚类中心映射到各图像信息上.
1.2.3 变化检测精度评价
错检率、漏检率和总体精度是本文对提出的方法的精度进行定量评价的三个指标. 表达式如下:
错检率:

(14)
漏检率:

(15)
总体精度:

(16)
式(14)~(16)中,PF为遥感影像数据中未发生变化却被错检的像元个数;NF为遥感影像数据中发生了变化却被漏检的像元个数;M×N为遥感影像数据像元个数的总和;RCD为遥感影像数据中发生变化的像元个数的总和[23].
2 实验结果与分析
2.1 实验数据
为印证本文方法的有效性,分别选取2013年、2014年获取的同一区域两景GF-1影像和Szada数据集中同一区域两景影像作为实验数据,如图2(a)、图2(b)、图2(c)、图2(d)所示. 第一组GF-1影像分辨率为2 m,经多光谱波段与全色波段融合得到,两景影像大小均为720像素×383像素,均具有近红外、红、绿和蓝四个波段. 图2(e)为参考影像,是人工目视解译获取得到,其中变化区域为16 189像素,未变化区域259 571像素. 第二组数据为两景Szada数据集影像,分辨率为1.5 m,两景遥感影像的大小均为952像素×640像素;图2(f)为参考影像,通过人工目视解译获取得到,其中变化区域为24 092像素,未变化区域585 188像素. 对比两组影像中不同地物光谱信息的变化情况,可以看出主要的变化区域为农业用地和建筑物之间的相互转换.

(a) GF-1 2013年12月 (b) GF-1 2014年12月 采集影像 采集影像

(c) Szada变化前影像 (d) Szada变化后影像

(e)GF-1参考影像 (f) Szada参考影像图2 原始影像图
2.2 实验结果与分析
为了验证本文方法的可行性和可靠性,选取FCM[21]、FLICM[24]和OTSU[25]方法作为对比实验.
1) 第一组影像
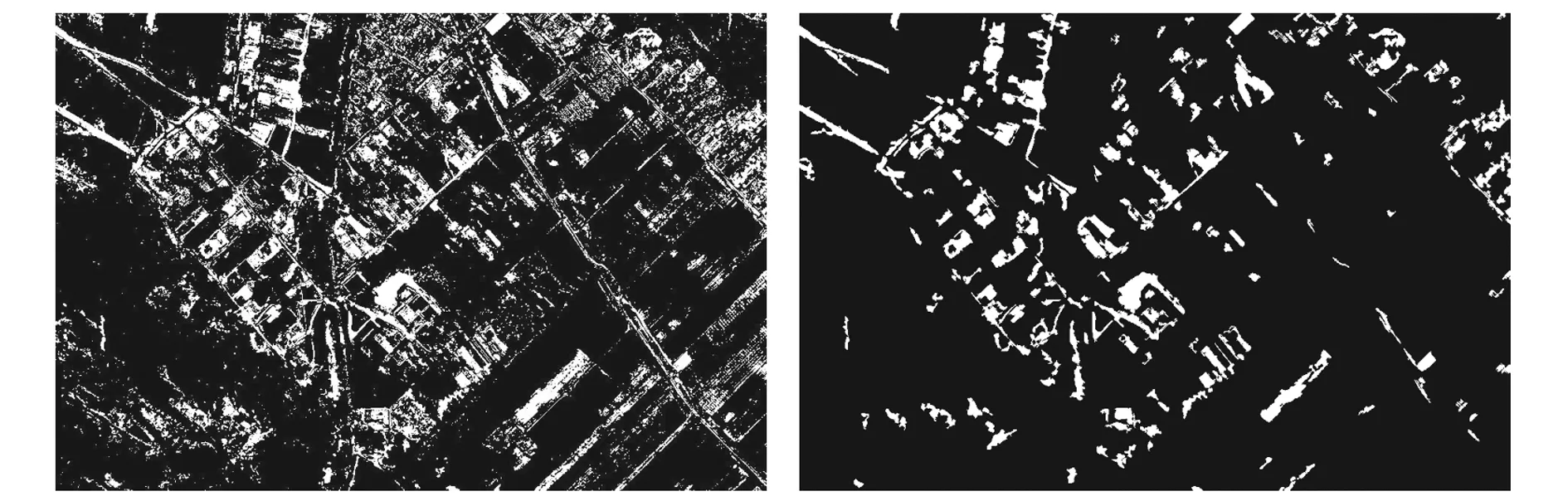
图3为采用FCM、FLICM、OTSU和本文方法得到的最终变化检测结果.表1为第一组实验数据经过各种方法进行遥感影像变化检测得到的错检率、漏检率以及总体精度.

(a) FCM检测结果 (b) FLICM检测结果

(c) OTSU检测结果 (d)本文方法检测结果图3 GF-1变化检测结果图
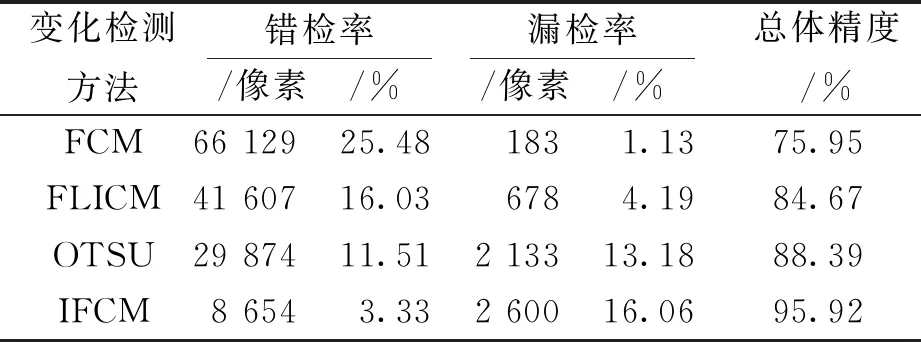
表1 错检率、漏检率以及总体精度
由图3可以看出,高分辨率遥感影像相较于其他遥感影像,具备愈加丰富的光谱和纹理等特征,存在不同影像中相同地物的差异性加强、不同地物的光谱特征界限不清相互混同等影响,致使影像光谱信息殽杂、光谱域的可区分性下降,“同物异谱”和“异物同谱”现象在影像中大量涌现. 同一地物在两景影像中的光谱特征不一致,导致大量未变化的道路和建筑物被检测为变化,采用传统FCM和FLICM变化检测方法存在大量的错检现象,采用OTSU变化检测方法虽然减少了错检情况,但依然效果不佳;而发生变化的不同地物由于光谱特征混淆而出现漏检现象. 采用本文方法错检的变化区域为8 654个像素,错检率为3.33%,总体精度达到了95.92%,较好地解决了“同物异谱”带来的错检现象,但由于CVA只考虑了影像的光谱特征而忽略了纹理特征,漏检情况未能得到很好的控制. 本文方法相较传统FCM、FLICM和OTSU方法来说,大幅降低了错检率,总体精度至多提高了19.97%.
2) 第二组影像
图4为采用FCM、FLICM、OTSU和本文方法得到的最终变化检测结果.表2为第二组影像变化检测结果的错检率、漏检率以及总体精度.

(a)FCM检测结果 (b)FLICM检测结果
(c)OTSU检测结果 (d)本文方法检测结果图4 Szada变化检测结果图
与第一组影像相比,“异物同谱”和“同物异谱” 现象对检测结果的影响因为其空间分辨率的提高而增大,各类地物光谱和纹理特征的离散程度被加重. 同时本组影像较第一组影像地物特征更为繁杂,光谱和纹理信息复杂、各地物间的空间相关性更强,信息提取难度增大,故错检漏检现象有所增加. 其中采用FCM方法、FLICM方法和OTSU方法的错检现象尤为严重,大量未变化的农业用地、建筑物、道路被检测为变化. 采用本文方法错检的变化区域为33 889个像素,错检率为5.79%,总体精度达到了92.70%. 较好地解决了复杂地物影像中“同物异谱”带来的错检,但同样受CVA未考虑纹理特征的限制,漏检情况未能得到很好的控制. 本文方法相较传统FCM、FLICM和OTSU方法来说,大幅降低了错检率,总体精度至多提高了27.7%,是可用于复杂地物影像的有效可行的变化检测方法.
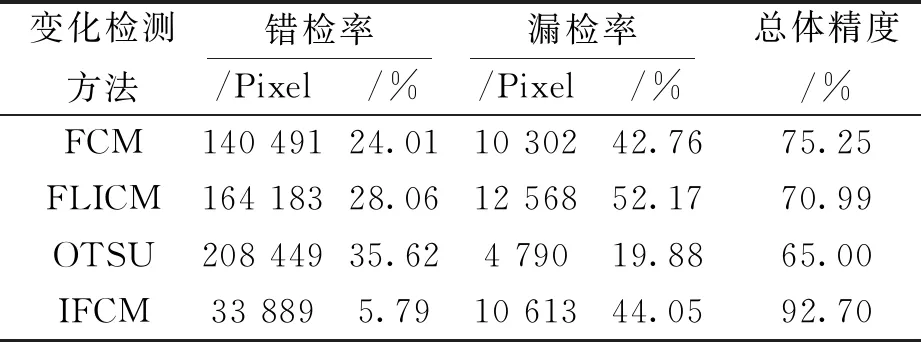
表2 错检率、漏检率以及总体精度
3 结束语
为了解决变化检测方法过程中存在的不确定性问题,提出了一种CVA-IFCM的遥感影像变化检测方法. 选取两组多时相遥感影像作为实验数据,以印证本文方法的可靠性和可行性. 实验结果表明,提出的方法有效降低了错检率,具有较高的精度,变化检测正确率提高到了95.92%和92.70%. 但本文存在以下不足:1)该方法需要设置大量的参数,如何自动选取最优阈值还有待进一步研究;2)如何有效地消除“异物同谱”和“同物异谱”问题对高分辨率影像的影响,从而解决漏检问题,是未来研究的重点.
猜你喜欢
导航定位学报(2022年5期)2022-10-13
机械工业标准化与质量(2022年8期)2022-10-09
兵器装备工程学报(2022年8期)2022-09-13
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2022年6期)2022-07-02
南京理工大学学报(2022年1期)2022-03-17
计算机应用与软件(2021年7期)2021-07-16
集装箱化(2021年1期)2021-04-12
中国信息技术教育(2020年2期)2020-02-02
华东师范大学学报(自然科学版)(2019年5期)2019-11-11