
双层稀疏组Lasso高分辨SAR结构特征增强成像
2021-01-26 07:14李慧娟李埔丞
系统工程与电子技术 2021年2期
杨 磊, 李慧娟, 黄 博, 刘 伟, 李埔丞
(1. 中国民航大学天津市智能信号与图像处理重点实验室, 天津 300300; 2. 中国工程物理研究院电子工程研究所, 四川 绵阳 621999)
0 引 言
合成孔径雷达(synthtic aperture radar, SAR)属于微波成像雷达,它通过有限尺寸的物理天线形成大的长的虚拟孔径,从而实现对地面场景的高分辨率成像,其中雷达系统的分辨单元可远小于目标尺寸,因此能够获得包含有细节目标结构信息的雷达图像,从而有效提高目标的特征分析与自动识别精度[1]。由于实现高分辨SAR成像需要接收并处理宽带雷达信号,这意味着传统基于香农-奈奎斯特定理的采样方法所导致的雷达大数据量会令存储和传输系统不堪重负[2]。2006年,Donoho基于信号逼近等概念提出压缩感知(compressive sensing, CS)理论[3],该理论指出任何变换域的稀疏信号或可压缩信号在低维空间上的少量随机线性投影所得的稀疏解已足够实现信号重构。这一新型的采样方法突破了瑞利分辨率的限制,使得确定采样速率的不再是带宽,而是信号的结构内容,从而有效降低采样频率以及数据处理与存储带来的成本。这一发现为信号处理领域带来革命性影响,同时也极大推动了SAR稀疏特征增强领域的蓬勃发展,各种基于稀疏表示以获得稳健SAR目标识别与信号恢复的压缩感知类算法层出不穷[4-6],由于此类算法降低了对图像预处理的要求,且能够拥有比传统方法更高的精度,因此被广泛应用于多种雷达成像模式,如SAR[4]、SAR地面动目标成像(SAR ground moving target imaging, SAR-GMTIm)[5]和逆SAR(inverse SAR, ISAR)成像[6]。
常见的凸优化类压缩感知重构算法有基追踪(basis pursuit, BP)法[7]、最小角度回归(least angle regression, LARS)法[8]等。这些算法已经广泛使用,但多变量协同能力差,并且多适用于小规模和低维度数据处理,面对SAR高维特征数据时,其运算复杂度将会指数级上升。针对这一问题,Boyd等人[9]于2011年提出适合大规模分布式约束凸优化问题的交替方向乘子法(alternating direction multiplier method, ADMM)。该方法结合了对偶分解法的可分解性和增广拉格朗日乘子(augmented Lagrange multipliers, ALM)法的良好上界收敛属性,通过“分解-调和”过程,首先将初始的全局问题分解成局部的子问题,以此降低全局问题的计算难度,然后采取各个击破的方式,分别解决每个子问题,最后进行调和过程,即将局部子问题的解进行调和,继而得到原问题的全局最优解。
这样的ADMM框架有效降低了原问题的求解难度,大大提高了运算效率,同时在统计学、机器学习和雷达信号处理等多个领域得到广泛应用[10]。其中,信号处理领域最常见的应用是通过ADMM算法求解1正则化线性回归(简称为Lasso)模型,由于ADMM框架可以自然地将Lasso模型中非平滑的1惩罚项和平滑的最小二乘损失项分离开来,因此基于Lasso的ADMM算法在应用于SAR稀疏特征增强成像时具有良好的稳健性与有效性[11]。但Lasso模型在实际的SAR图像重构中存在一定的限制,比如SAR图像中通常会存在同一类型的区域特征信息,这些信息会自然形成一组,若能研究一种Lasso模型的扩展版本,对这类信息进行利用,则SAR图像重建结果的精度会得到很大改善,因此有必要研究构建一种结构稀疏模型,能够在SAR稀疏特征增强的同时实现结构特征增强,这将大大提升SAR成像的质量。
Yuan等人利用组结构先验信息提出组Lasso(Group Lasso)模型[12],将1范数正则化项扩展到具有更为复杂的1/F混合范数正则化约束项。该模型通过人为预先设定分组,实现变量在组水平上的稀疏,即同一个组变量的回归系数同时为0或不为0的组间稀疏,有效改进了Lasso处理组数据时的缺点。然而,Group Lasso模型在实际应用中也有一定缺陷,比如该模型虽能有效剔除SAR回波数据中不重要的组,却只能实现组间稀疏,无法对组内信息也进行稀疏处理,这导致该模型在实际SAR稀疏信号恢复成像中灵活性较低。因此本文提出一种有效应用于SAR回波信号重建,基于双层稀疏Group Lasso ADMM(sparse Group Lasso-ADMM, SGL-ADMM)算法,该算法可通过求得1范数与1/F混合范数的正则化近端闭合解,同时实现组间稀疏和组内稀疏与平滑处理,可以有效提升传统SAR成像的精度。
本文首先推导得出SAR、SAR-GMTIm、ISAR 3种模式回波信号模型的解析表达式,继而构建出对应的通用信号模型,利用所提算法对该回波信号模型进行求解。具体来说,SGL-ADMM算法首先针对含最小二乘项的子问题引入岭回归求得其解析解,再分别推导得出1/F混合范数及1范数对应的近端算子,并利用“分解-调和”的思想对两种近端算子及其对应的对偶变量进行并行运算,然后利用高斯-赛德尔思想不断在SGL-ADMM框架中进行对偶迭代,从而实现对SAR回波复数据的稀疏与结构特征联合增强。本文实验验证分别选用3种SAR模式的仿真数据与实测数据,将所提SGL-ADMM算法与传统基于Lasso和Group Lasso的ADMM算法进行定性的对比实验,并采用相变图(phase transition diagram,PTD)定量分析SGL-ADMM的信号/特征恢复性能,进而验证了本文所提SGL-ADMM算法应用于SAR成像恢复的可行性和优越性。
1 回波信号模型
本文首先分别推导SAR、SAR-GMTIm和ISAR的数据域回波信号表达式,进而提出同时适用于这3种模式的雷达回波信号通用模型。图1和图2中分别给出SAR、SAR-GMTIm和ISAR的成像几何模型。3种模式均利用雷达与目标之间相对运动形成的虚拟合成孔径来实现多脉冲回波的相干积累[13],从而实现方位向的高分辨率,并通过载机或地基的雷达天线发射大带宽和时宽的线性调频(linear frequency modulation, LFM)信号来保证雷达距离向的高分辨率,再利用相应的SAR成像算法实现对场景目标的高分辨成像。

图1 SAR、SAR-GMTIm模式数据采集几何模型Fig.1 Geometric model of SAR and SAR-GMTIm data acquisition
如图1所示,以点O为原点建立空间直角坐标系O-XYZ。SAR平台以速度v按预定航线沿坐标系X轴方向(即方位向)飞行。在数据采集过程中,雷达工作在侧视聚束模式下,波束中心指向场景中心Oc。
为实现在静止场景中检测运动目标响应并完成对运动目标的重聚焦成像从而采用多通道天线,设第n通道等效天线相位中心(antenna phase center, APC)为
qn(t)=q0(t)+dn
(1)
式中,q0(t)为参考通道位置矢量;等效APC沿航线均匀分布且间距为d;dn为参考通道到第n通道的空间矢量;t为方位向慢时间变量。雷达信号的收发模式是n个通道的等效APC同时收发信号。
1.1 SAR模式
设载机到场景中心的斜距距离参考矢量为R0=R0r,其中r为斜距向单位矢量。则静止目标距离SAR平台的实时斜距为Rs(t)=|R0+rs-q0(t)|,将其在参考斜距|R0-q0(t)|处进行泰勒展开可得

(2)
式中,rs为静止散射点P相对于场景中心Oc的偏移矢量;O(t)是在参考斜距|R0-q0(t)|处的2阶及以上展开项,在远场假设下可以忽略不计。根据雷达原理,载机发射的LFM信号经过式(2)所示的距离历程后,对接收到的回波数据进行距离向压缩、方位向解线性调频LFM技术处理和极坐标形成算法(polar formation algorithm, PFA)插值处理[5],可得SAR模式下的数据域为
(3)
式中,地面静止的第s个散射点的初始位置为(xs,rs);sinc函数为第s个散射点的距离向包络;exp函数为方位线性相位项;λ为雷达系统发射信号波长;t′为插值后的慢时间变量;cn为杂波和噪声。
1.2 SAR-GMTIm模式
在SAR-GMTIm模式下,如果考虑到地面成像场景中存在运动目标,假设其匀速速度为vt,可分解为方位向和斜距向的速度(vx,vr),则SAR地面动目标成像模式中运动目标距离载机平台的斜距为

(4)
式中,rm为运动目标相对于场景中心Oc的位置偏移矢量。式(2)与式(4)均为实时斜距在参考斜距|R0-q0(t)|处的泰勒展开,区别在于式(2)针对地面静止目标并展开至一阶,而式(4)是针对动目标计算斜距,假设运动目标匀速直线运动情况下,考虑到其速度会造成2阶调制,因此式(4)中泰勒展开至2阶,从而可以得到式(4)所示SAR-GMTIm模式下的斜距表达式。设第m个运动目标的初始位置为(xm,rm),考虑到对地面运动目标成像时,静止场景回波即杂波的影响,可能造成运动目标检测及成像性能降低,因此结合沿航向多通道SAR系统回波,将第i通道回波与参考通道回波相减,则可实现杂波相消[14-15],从而得到SAR-GMTIm模式下数据域表达式为
(5)

(6)
1.3 ISAR模式
ISAR成像模式理想转台几何模型如图2所示。

图2 ISAR模式数据采集几何模型Fig.2 Geometric model of ISAR mode data acquisition
假设进行平动运动补偿后,雷达相对静止而目标仅存在相对于参考点的转动分量。设雷达位于C点,飞机中心为O,在机身内建立空间坐标系O-XY,其中J点是飞机上任意一点,其位置为(xs,rs),与坐标轴夹角为θ,相对中心O的偏移矢量为rp=OE+EJ。目标以角速度ω围绕自身做旋转运动,在此过程中雷达波束持续覆盖目标。根据矢量相加可得散射点和雷达的距离:
Rp(t)=R0+|rp|=R0+rscos(θ(t))+xssin(θ(t))
(7)
当ISAR成像积累时间较短,θ较小时,可近似认为目标在匀速旋转,即满足等式θ(t)=ωt,sin(ωt)≈ωt,cos(ωt)≈1。因此,可得ISAR模式下数据域表达式为
(8)
式中,As为散射点的后向散射能量值。
通过观察如式(3)、式(5)和式(8)所示的3种成像模式回波信号模型,可见3种模型的共同点是均有距离向包络sinc函数和方位向的线性相位,并且都存在杂波和噪声项,因此在经历如距离压缩、杂波相消等一系列过程的处理后,3种模式的回波信号模型可以通过统一的矩阵形式建立:
Y=AX+W
(9)

A0=[a[ζd(1)],a[ζd(2)],…,a[ζd(n)]],
a[ζd(n)]=[e-j2πζd(n)t1,e-j2πζd(n)t2,…,e-j2πζd(n)tN]T
(10)
在SAR-GMTIm模式下时,A是二阶参数化傅里叶字典,即

(11)
2 双层稀疏组Lasso成像算法
求解式(9)所示的回波模型是典型的图像不适定问题,而解决不适定性的有效途径则是在数据压缩感知处理中引入关于目标解的先验信息,因此创建目标结果的先验模型对于实现高分辨雷达成像至关重要。近年来,热门的正则化几何模型被人们广泛应用于雷达信号重建,正则化方法的本质是采用一组与原不适定问题相邻近的适定问题的解,来无限逼近原问题的解,并给模型添加规则限制用以约束要优化的参数,防止过拟合,最经典的便是Tibshirani[17]提出的Lasso模型
(12)
式中,‖·‖F为Frobenius范数;‖·‖1为1范数;ρ>0为正则化参数。右侧括号中第1项为最小二乘项,即数据保真项,用以衡量雷达恢复信号与原含噪信号的逼近程度;右侧括号中第2项为惩罚项,用以添加SAR图像中强散射点具有的稀疏先验信息约束。然而,SAR的实际成像场景庞大,地物信息丰富,场景中散射点的强度不均且各种散射特征极复杂,高分辨成像虽然为目标的精细特征提取提供了有利的条件,但Lasso模型仅可单纯地增强成像目标的稀疏特征,虽能有效消除背景噪声与杂波,却会同时造成目标弱散射特征的丢失,使得精细的结构特征在成像恢复中难以保留,从而降低了高分辨成像特征提取优势。事实上,雷达信号中存在相似散射点可以自然地归为一组,形成连续性结构,只考虑稀疏特征则会导致无法保留目标的连续性,使得在抑噪的同时将部分有用信息也一并去除,因此如何在SAR成像中增强散射点稀疏特征的同时增强目标的结构特征变得尤为重要。针对Lasso模型的这一缺点,本文提出可实现双层稀疏SGL模型,表示为

(13)
式中,Xi表示矩阵X的第i个块结构(组),且i=1,2,…,L。λ1和λ2分别为1范数和F,1范数对应的正则化参数,用以调节恢复中图像的稀疏度和结构平滑度。当L=1时,相当于X只有一个组,即不考虑块结构特征,此时式(13)将变为式(12)的Lasso问题。当λ1=0时,该模型则变为Group Lasso形式,不再具有组内稀疏性。当SGL模型应用于SAR成像时,第2项1范数可对雷达成像场景的每个分辨单元回波数据进行稀疏表征,即该惩罚项可实现组内稀疏。第3项是F,1范数,该项首先在第2项Laplace先验的基础上增加了高斯先验,使得SAR场景中散射点的块结构内部具有平滑特性,即实现组内平滑。对每个组利用Frobenius范数结构平滑后,进一步添加对L组加总求和约束,相当于在组水平上进行稀疏,区别于1范数对每个像素稀疏,该组合尽可能选出更少的组,即可实现组间稀疏,从而共同组成了具有结构惩罚特性的F,1范数,这样的双层SGL模型在SAR成像中可以在剔除不需要的组的同时具有组内特征稀疏的灵活性,可更加有效地保留有用结构信息,去除背景噪声。另外,在引入块结构特征先验信息的过程中,本文采用计算欧式距离的方法对雷达回波复数据进行分组,通过设置一定阈值,将区域聚类特征信息归类,再利用F,1范数平滑与稀疏,从而有效保留目标中的有用信息。
综上所述,SGL模型可实现SAR多特征联合增强,因此选择适合的算法求解该模型是关键,但传统的SAR成像算法协调多特征的能力较差,容易顾此失彼,不能将SGL模型的多特征增强优势发挥出来,造成最终成像效果不尽人意。本文提出的SGL-ADMM算法引入的ADMM优化框架结合了对偶分解法和ALM法的优点,其优势便在于利用分解-调和思想,将复杂难解的全局大问题分解为多个较易求解的局部子问题,在实现分布式优化的同时可调和全局问题,实现结构特征与稀疏特征的联合增强时的最佳协调,且具有优越的收敛性和稳健性。SGL-ADMM算法可由式(13)转化为如下约束性优化问题:
min [f(X)+g(Z)]
s.t.BX+DZ=0
(14)

(15)
g(Z)=g1(Z1)+g2(Z2)=
(16)
进而可得式(14)的增广拉格朗日形式为

(17)
式中,γ为拉格朗日乘子系数;[·]H表示矩阵的共轭转置;U为对偶更新变量。式(17)带有二次惩罚项增广拉格朗日函数的对偶上升方法,即为交替方向多乘子法中的多乘子与多分裂变量的来源。此时,利用SGL-ADMM算法求解式(17)问题,可得
(18)
式中,S1=(1/γ)U1和S2=(1/γ)U2为归一化对偶变量(或缩放变量)。将式(16)代入迭代过程,可得
(19)
式中,上标k表示矩阵的迭代次数。算法中第1步迭代为求解原变量X,是典型的最小二乘问题,相当于求解岭回归问题。第2步是针对分裂变量Z1的1范数正则优化,通过求解1范数对应的近端算子来实现组内稀疏。第3步是Z1相应的对偶变量更新过程。第4步为针对分裂变量Z2的F范数正则优化,可实现组内平滑和稀疏。第5步为Z2相应的对偶变量更新过程。由式(19)可见SGL-ADMM算法迭代过程中变量X、Z1和Z2是相互交替进行更新,因此称之为交替方向。
2.1 原变量X更新
对式(19)第1步X的联合最小化求解并更新,相当于岭回归问题,其目标函数为
(20)
可见目标函数为凸函数,则对其求导可得

(21)
令导数为0,则X的解为
Xk+1=(AHA+γI)-1[AHY-BH(DZk-Sk)]=
(22)
2.2 分裂变量Z1更新
(23)
式中,proxλ1/γ(·)表示函数的近端算子,此处表示1范数对应的软阈值算子。针对SAR回波的复数性质,对矩阵Z进行复数分解,并且分别对实数与复数部分求导,可得复数软阈值算子为

(24)

(25)
2.3 分裂变量Z2更新
(26)
对第i组的每个变量求次梯度(近端算子)可得

(27)

(28)
基于SGL罚高斯回归模型的ADMM算法如下所示。

基于SGL罚高斯回归模型的ADMM算法步骤 1 初始化,令k=0,X0,Z0,S0;步骤 2 设定迭代次数与目标精度,若停止准则不满足,进行循环;步骤 3 根据式(22)更新X变量,即Xk+1=(AHA+γI)-nd 步骤 6 若不满足停止准则,继续步骤3~步骤5,若满足停止准则,跳出循环;步骤 7 停止迭代,输出X。
本文提出的SGL-ADMM算法与传统基于Lasso模型的ADMM算法主要区别是,在SAR回波复数据处理中引入了能够实现SAR目标结构特征增强的分裂变量Z2(步骤5),并且同时保留了传统ADMM算法中能够实现稀疏特征增强性能的分裂变量Z1(步骤4),因此最后步骤7中输出的是稀疏特征与结构特征联合增强后的图像X。SGL-ADMM算法首先引入稀疏先验,通过推导1范数对应的近端算子,即复数软阈值算子来得到稀疏闭合解。然后利用SAR数据中的L组先验特征信息来引入F范数,并通过循环迭代L次来求得结构闭合解,达到SAR数据全局平滑效果,从而实现SAR结构特征增强。基于这样的并行优化框架,SGL-ADMM算法相对于传统SAR成像算法可以有效提升精度和运算速率。
3 实验验证
为了验证所提SGL-ADMM算法用于SAR、SAR-GMTIm以及ISAR 3种模式进行高分辨成像时的可行性以及多特征增强效果等性能,本文首先基于仿真转台模型数据利用Lasso-ADMM算法、Group Lasso-ADMM算法以及所提SGL-ADMM算法进行3种模式下的成像定性对比,再应用美国Sandia实验室公布的实测SAR复数据图像和Yak-42运输机实测ISAR数据以及Gotcha雷达动目标数据集这多组实测数据分别进行3种算法的定性成像对比实验,最后将仿真转台模型的蒙特卡罗数据用于相变热力图成像恢复实验来进行性能评估,用以定量对比分析3种算法的回波信号恢复性能。从而有效验证了所提SGL-ADMM算法相较传统算法的优越稀疏与结构特征恢复性能。
3.1 仿真实验
本文首先采用一组仿真转台模型数据成像实验来验证所提SGL-ADMM算法的优越性能。为了验证SGL-ADMM算法相较传统算法在雷达回波信号连续结构特征方面的恢复性能,本实验设置仿真合成的转台模型数据,并假设散射体位于场景距离向和方位向的十字交叉区域,其中目标与雷达相距50 km且无平移运动,具体的雷达参数如表1所示。

表1 仿真实验参数设置
图3(a)所示为无噪声且无降采样时的转台模型参考恢复图像,图中十字区域内共有57个散射点,并且各个点的强度服从复高斯分布,精度为1/5,是方差的倒数,均值为2。整个目标位于场景中心并且具有明显的强连续性结构。图3(b)为对图3(a)进行降采样与加噪声处理后的成像结果,其中降采样率为0.7,加入的高斯白噪声为10 dB。图3(c)为基于传统Lasso模型的ADMM算法对图3(b)的重建成像,由于Lasso-ADMM算法仅有稀疏先验,因此尽管成像结果抑噪效果明显,但目标的结构特征已经几乎丧失,十字轮廓也未重建。图3(d)为基于Group Lasso模型的ADMM算法成像效果,该模型同时具有组间稀疏与组内结构平滑能力,因此相较图3(c)该算法在结构特征方面增强明显,鉴于ADMM算法的调和性能,Group Lasso -ADMM算法在结构特征保留的同时,背景的去噪稀疏能力也较强。但该算法仍有不足之处,首先散射点附近仍有少许噪声未被抑制,其次参考恢复结果中的散射点成像结果强度差异性较大,而Group Lasso -ADMM算法并未将图3(a)所示不同点的散射强度精确地恢复。图3(e)为本文所提SGL-ADMM算法恢复结果,该算法在Group Lasso -ADMM算法基础上增加了组内稀疏性能,因此可以完整恢复目标散射强度,并且相较Lasso -ADMM与Group Lasso -ADMM算法,背景稀疏特征与目标结构特征联合增强效果十分显著。对比本文所提方法的恢复精度(归一化均方误差(normalized mean square error,NMSE)为0.31)与Lasso(NMSE为6.21)和Group Lasso(NMSE为2.44)可见,该方法具有更高的成像恢复精度。


图3 ISAR仿真数据不同算法成像结果Fig.3 ISAR simulation data imaging results of different algorithms
3.2 SAR实测数据成像恢复实验
实验应用美国Sandia实验室公布的SAR实测复数据图像来验证SGL-ADMM算法成像效果。图4目标场景为绿化带与马路的SAR成像结果。


图4 SAR实测复数据不同算法成像结果Fig.4 SAR imaging results of different algorithms based on complex real data
其中图4(a)为经过降采样与加噪声处理后的SAR结果,降采样率为0.5,加入的高斯白噪声为10 dB。图4(b)为Lasso-ADMM算法的恢复成像效果,此时绿化带内像素点已经较为分散稀疏,且未形成连续结构,与此同时背景噪声也未完全抑制,可知如若进一步把1范数对应的正则化参数ρ增大,虽然会令噪声去除干净,但绿化带内部块结构的像素点会更加稀疏,甚至丧失边缘结构特征。图4(c)为Group Lasso-ADMM算法的SAR成像结果,可见相较图4(a),散射体组内平滑效果明显,块结构特征得以增强,但马路背景仍存在噪声。图4(d)为SGL-ADMM算法处理后图像,目标结构特征完整保留,地物轮廓特征清晰,且抑噪能力强,成像结果对比度最高。
3.3 ISAR实测数据成像恢复实验
本组实验采用Yak-42实测图像进一步验证SGL-ADMM算法的成像效果。图5(a)为降采样率0.7以及5 dB高斯白噪声处理后图像。图5(b)为利用Lasso-ADMM算法实现的ISAR成像,由于未考虑结构先验,飞机头部与机身上部断开,左边机翼中部亦断开,右边机翼则与机身下部仅有一丝连续,而此时噪声仍未彻底去除,当调节正则化参数ρ使抑噪性增强时,目标的结构特征已丧失很多。图5(c)为Group Lasso-ADMM算法处理后的ISAR图像,相较图5(b)该算法在背景去噪较为干净的同时飞机结构特征也保留较为完整。图5(d)为SGL-ADMM算法处理后的ISAR图像,明显飞机内部结构非常饱满,机身中部无空白,飞机轮廓清晰,由于机头与机身本就是同一类块结构特征,因此在恢复后也本应具有完全的连续性,SGL-ADMM算法在完整恢复飞机结构特征的同时将背景噪声也完全抑制,由此可见所提算法对于稀疏与结构两种特征的相互调和能力较强,恢复性能较好。
3.4 SAR-GMTIm实测数据成像恢复实验
在本组SAR动目标实验中,通过应用Gotcha数据集[18],对所提算法和基于Lasso、Group Lasso的ADMM方法进行定性和定量对比实验。图6(a)所示为在动目标数据集中选出的一部分地面动目标数据,鉴于车辆在运动时本身存在一定的速度,使得最终的SAR-GMTI成像结果散焦严重,并且相对于实际的位置,成像后的车辆位置发生了一定的偏移。图6(b)为图6(a)图像的扩大区域,以此更清晰地显示出观测目标。

图5 ISAR实测复数据不同算法成像结果Fig.5 ISAR imaging results of different algorithms based on complex real data

图6 Gotcha GMTI实测数据成像结果Fig.6 Gotcha GMTI real data imaging results
图7(a)为经过多通道杂波相消与LVD时频表示后,采用传统的匹配滤波器组法进行的聚焦成像,可见虽然车辆有聚焦效果,但背景杂波噪声严重,成像效果不佳。图7(b)为Lasso -ADMM算法成像结果,图像的聚焦性能与稀疏性能均显著提高,但不足的是目标车辆的轮廓结构未完整恢复,车头部分几乎未恢复。同时本实验进行定量分析来衡量成像的效果,图7(b)中其熵为4.619 2,目标杂波比为32.179 9。熵值愈小则聚焦愈强[19],目标杂波比愈大则目标散射强度愈强[20]。图7(c)为Group Lasso -ADMM算法成像结果,其熵为4.403 6,目标杂波比为32.509 7,可见相较图7(b),该算法在结构特征增强效果有所改善,但目标整体结构仍有缺陷。图7(d)为SGL-ADMM算法处理后图像,其熵为4.002 5,目标杂波比为33.034,相较另外两种算法,本文所提算法重建图像的图像熵最小,目标杂波比最大,因此图像的稀疏特征、结构特征以及聚焦特征联合增强效果明显,并且多特征增强并未使算法运算效率过多降低,其运算耗时一般比传统ADMM算法多5~10 s。本组SAR-GMTIm实测实验通过定量与定性分析有效证实了SGL-ADMM算法的优越恢复性能。


图7 Gotcha GMTI实测数据不同算法成像结果Fig.7 Gotcha GMTI real data imaging results of different algorithms
3.5 相变热力图恢复实验
PTD是由斯坦福大学的Donoho教授提出[21],用于计算和对比各个算法间的重建能力。该定量实验应用图3的仿真转台数据对Lasso -ADMM、Group Lasso-ADMM以及所提算法进行蒙塔卡罗实验,并计算在动态参数调节下,各个算法的重建结果相较于图3(a)的相关程度,从而对比得出本文所提算法的优越恢复性能。图8所示为固定50%稀疏度下,3种算法的降采样率(downsampling rate, DSR)-信噪比(signal to noise ratio, SNR)相关度热力图,横轴为DSR,纵轴为SNR。


图8 不同算法DSR-SNR相关度PTD对比Fig.8 Comparison of different algorithms for DSR-SNR ratio correlation PTD
热力图的衡量指标相关系数的计算公式如式(29)所示,图8中红色部分颜色越深表示算法成像图与参考恢复图的相关系数绝对值|RXXk|越接近1,即相关程度越大,重建结果越好,黄绿蓝色渐变部分颜色越深则表示|RXXk|越接近0,重建效果越差。
(29)
式中,cov(·)、E(·)和σ(·)分别为计算信号矩阵的协方差、数学期望与方差。
图9所示为固定SNR为-5 dB条件下,3种算法的DSR-稀疏度(sparseness, SR)相关度热力图,横轴为DSR,纵轴为SR。

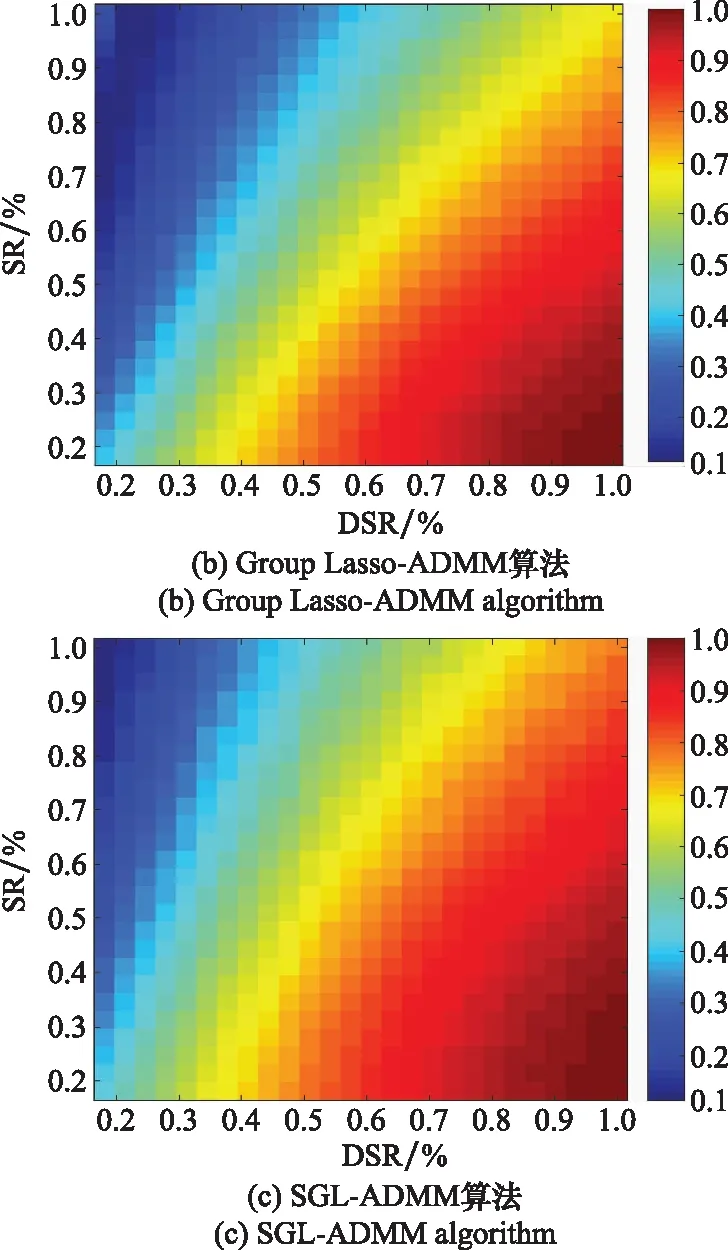
图9 不同算法DSR-SR相关度PTD对比Fig.9 Comparison of different algorithms for DSR-SR ratio correlation PTD
综上所述,针对Lasso -ADMM算法、Group Lasso-ADMM算法以及所提SGL-ADMM算法进行的两组不同参数下的热力图对比实验均显示SGL-ADMM算法的红色部分面积大于其他两种算法,而更大面积的高相关值区域表示算法在不同DSR、SNR和SR环境下的恢复稳健性越高,因此有效验证了所提算法应用于SAR回波复数据的优越恢复性能。
4 结 论
本文针对仅能实现单一稀疏特征增强的传统凸优化类算法在SAR成像过程中会使得目标的精细结构特征丢失这一问题,提出能够同时实现目标稀疏特征与结构特征联合增强的SGL-ADMM算法。所提算法首先通过在ADMM框架中引入1/F混合范数并推导其对应的近端算子来实现结构特征表征,然后通过推导1范数面向SAR回波复数据的复数软阈值来实现稀疏特征表征,最后利用SAR、SAR-GMTIm和ISAR 3种模式下的仿真数据和实测数据,对所提算法与Lasso-ADMM算法、Group Lasso-ADMM算法进行定性成像对比,并利用蒙特卡罗相变热力图定量分析所提SGL-ADMM算法的成像重建性能,从而有效验证了该算法卓越的多特征联合增强能力。然而在实验过程中,本文发现该算法在对目标构造分组先验时具有多选择性和灵活性,因此有必要研究一种最佳的分组方式,如尝试突破欧式距离限制,采用其他拟合程度更好的距离方式可能会达到更好的效果,使算法成像精度得到进一步提升,这将是后续工作的重点。
猜你喜欢
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
中国校外教育(下旬)(2017年8期)2017-10-30
数学物理学报(2017年3期)2017-07-01
中国塑料(2016年2期)2016-06-15
兽医导刊(2016年12期)2016-05-17
火控雷达技术(2016年3期)2016-02-06
应用海洋学学报(2015年3期)2015-11-22
百科探秘·航空航天(2015年4期)2015-11-07
中国煤层气(2015年4期)2015-08-22
