轻型商用车集成式电子液压制动系统助力策略设计
2021-03-03 05:04李建涛杨继斌徐晓惠冉晓珂
时代汽车 2021年1期
李建涛 杨继斌 徐晓惠 冉晓珂


摘 要:伴随轻型商用车电动化的发展,用于轻型商用车的线控制动技术得到发展,针对线控制动技术中的集成式电子液压制动系统,提出一种基于模糊PI控制反应盘主副面位移差的制动助力方法。通过实车验证表明:实际反应盘主副面位移差能够快速跟随目标曲线,制动过程平顺,具有实用性。
关键词:轻型商用车 集成式电子液压制动系统 模糊PI 反应盘主副面位移差
Aiding Strategy Design of Integrated Electronic Hydraulic Brake System for Light Commercial Vehicles
Li Jiantao,Yang Jibin,Xu Xiaohui,Ran Xiaoke
Abstract:With the development of electrification of light commercial vehicles, the brake-by-wire technology for light commercial vehicles has been developed. Aiming at the integrated electronic hydraulic brake system in the brake-by-wire technology, a fuzzy PI control reaction plate main and auxiliary is proposed. The actual vehicle verification shows that the displacement difference between the main and secondary surfaces of the actual reaction plate can quickly follow the target curve, and the braking process is smooth and is of practical use.
Key words:light commercial vehicle, integrated electronic hydraulic brake system, fuzzy PI, displacement difference between main and sub-surface of reaction disc
随着汽车智能化、电动化的发展,传统的真空制动助力系统已经不满足制动需求,线控制动系统(BBW)由此发展迅速[1]。线控制动系统主要有泵式电子液压制动系统(P-EHB)、集成式电子液压制动系统(I-EHB)和电子机械制动系统(EMB)。EMB制动响应迅速,但电子机械制动器布局空间有限,电机选型小导致刹车力不足[2];P-EHB系统制动器用于高压储液罐的泵及其驱动电机在未制动时也需频繁工作,使用寿命受到影响[3];I-EHB系统结构紧凑,助力电机承担着助力和踏板力模拟的功能,保留着传统的液压制动系统,在电机出现故障失效时,依然能保障车辆制动的基本需求[4],因此I-EHB系统是现在发展的主流。
因此,针对用于轻型商用车的I-EHB系统,设计一种基于模糊PI控制反应盘主副面位移差的制动助力方法。
1 I-EHB系统运动过程分析
集成式电子液压制动系统结构如图 1所示,电机通过齿轮11、10增加扭矩,齿轮10与丝杆螺母9通过滑槽连接,在电机失效时,允许制动踏板不被电机卡住,带动整个丝杠螺母轴向移动,保障基本的制动需求。丝杠螺母将转动转化为平动,丝杆和反应盘壳体3相连,将会推着反应盘壳体向前移动,压缩反应盘,推动主缸推头5,进而压缩主缸6实现增压。
反应盘4与踏板推杆的静态相对距离为1.2mm,在较小的电机助力下,踏板推杆很快经过空行程与反应盘主面接触,此时电机助力和踏板力在反应盘处耦合,踏板推杆到反应盘的距离等于反应盘主副面位移差。踏板推杆与电机丝杠推杆的关系可描述为:
其中,xr为主副面相对位移差;xp为踏板推杆位移;xm为电机转动角度;i1电机与齿轮传动比;i2齿轮与丝杠螺母齿轮传动比;i3丝杠螺母传动比。
2 助力策略设计
制动助力系统控制算法结构如图 2所示,通过实际电机位置和反应盘主副面位移差信号计算出踏板推杆位移。制动状态辨识以踏板推杆位移信号作为输入,使用逻辑门限方法辨识出制动、保持、回退三种状态。根据真空助力器特性,设计目标反应盘主副面位移差曲线,如图3所示。根據电机制动状态和踏板推杆位移查表得到反应盘主副面位移差,与实际值作差得到误差,模糊控制器根据误差及其变化率调整PI参数,误差经过PI控制器后得到目标电机位置,最后进行电机位置跟随控制。
2.1 反应盘主副面位移差模糊PI控制器设计
模糊控制器以反应盘主副面位移差误差及其变化率作为输入量,PI控制器的参数、作为输出量。误差exr论域和误差变化率dexr论域采用7个模糊变量,模糊集为{NB、NM、NS、ZO、PS、PM、PB},其中:NB、NM、NS、ZO、PS、PM、PB分别代表较负大、负中、负小、零、正小、正中、正大。参数论域和参数论域采用5个模糊变量,模糊集为{VS、S、M、B、VB},其中:VS、S、M、B、VB 分别代表较小、小、中、大、较大。模糊语言输入、输出变量采用三角形隶属度函数。据经验和知觉推理制定模糊控制规则,如表1、表2所示,再通过面积中心法转化为清晰量。
3 实验验证
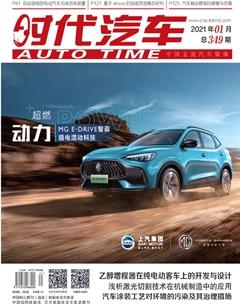
为了验证控制策略的有效性,进行了实车验证。在东风EV350轻型商用车上安装I-EHB,如图4所示,控制器主控芯片采用NXP5741P,使用NXP基于模型设计工具箱将Simulink控制程序生成代码并下载到主控芯片中,上位机通过CAN通讯采集控制器数据。
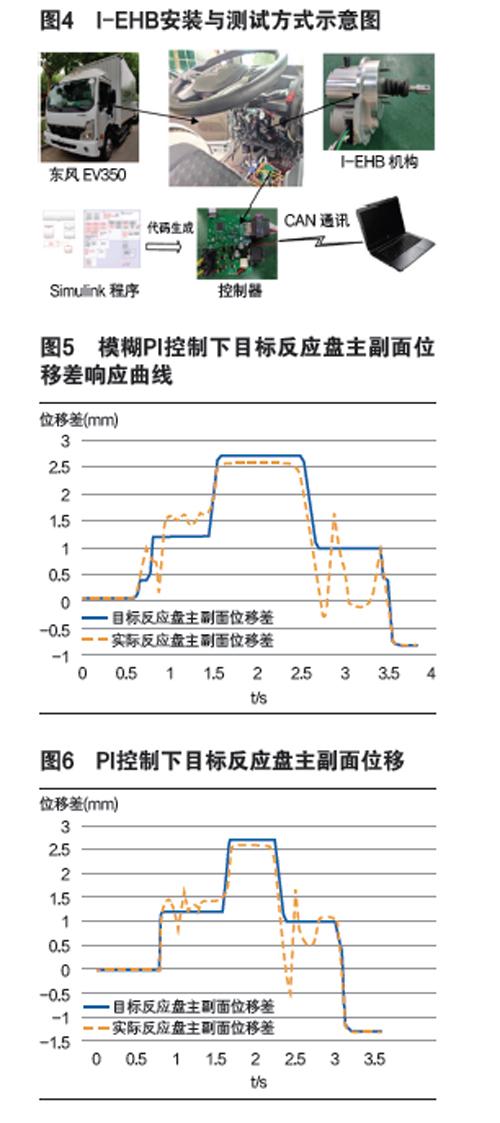
从图5、图6可知,与PI控制相比,模糊PI控制能够减少震荡,快速将实际值控制在目标值附近。从图7、图8可知,踏板力曲线原车液压制动助力系统制动后半行程踏板力超过了400N,踏板感沉重,I-EHB的踏板力小于180N,制动过程更加轻便舒适。
5 结语
本文对I-EHB系统的运动过程进行分析,提出一种基于模糊PI控制反应盘主副面位移差的制动助力方法,并在轻型商用车上验证了制动助力控制略的有效性,比原车液压制动助力轻便舒适。该方法不依赖模型参数,控制方式简单,适合工程运用。
成都市重大科技创新(2019-YF08-00003-GX),流体及动力机械教育部重点实验室研究基金(szjj2019-015),四川省科技厅重大专项(2019ZDZX0002)。
参考文献:
[1]董雪梅.汽车线控制动技术的研究与分析[J].汽车实用技术,2019,284(5):123-125.
[2]蔡海红.汽车线控制动系统安全控制技术研究[J].内燃机与配件,2018:77-78.
[3]皮志刚.解耦式电动制动助力器的控制研究[D].华南理工大学, 2018.
[4]余卓平,徐松云,熊璐,等.集成式电子液压制动系统鲁棒性液压力控制[J].机械工程学报,2015,51(16):22-28.